High-Dynamic Range Imaging
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-
Logarithmic Image Sensor for Wide Dynamic Range Stereo Vision System
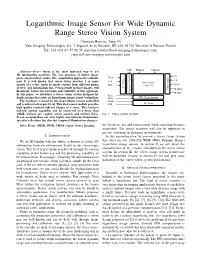
Logarithmic Image Sensor For Wide Dynamic Range Stereo Vision System Christian Bouvier, Yang Ni New Imaging Technologies SA, 1 Impasse de la Noisette, BP 426, 91370 Verrieres le Buisson France Tel: +33 (0)1 64 47 88 58 [email protected], [email protected] NEG PIXbias COLbias Abstract—Stereo vision is the most universal way to get 3D information passively. The fast progress of digital image G1 processing hardware makes this computation approach realizable Vsync G2 Vck now. It is well known that stereo vision matches 2 or more Control Amp Pixel Array - Scan Offset images of a scene, taken by image sensors from different points RST - 1280x720 of view. Any information loss, even partially in those images, will V Video Out1 drastically reduce the precision and reliability of this approach. Exposure Out2 In this paper, we introduce a stereo vision system designed for RD1 depth sensing that relies on logarithmic image sensor technology. RD2 FPN Compensation The hardware is based on dual logarithmic sensors controlled Hsync and synchronized at pixel level. This dual sensor module provides Hck H - Scan high quality contrast indexed images of a scene. This contrast indexed sensing capability can be conserved over more than 140dB without any explicit sensor control and without delay. Fig. 1. Sensor general structure. It can accommodate not only highly non-uniform illumination, specular reflections but also fast temporal illumination changes. Index Terms—HDR, WDR, CMOS sensor, Stereo Imaging. the details are lost and consequently depth extraction becomes impossible. The sensor reactivity will also be important to prevent saturation in changing environments. -

Receiver Dynamic Range: Part 2
The Communications Edge™ Tech-note Author: Robert E. Watson Receiver Dynamic Range: Part 2 Part 1 of this article reviews receiver mea- the receiver can process acceptably. In sim- NF is the receiver noise figure in dB surements which, taken as a group, describe plest terms, it is the difference in dB This dynamic range definition has the receiver dynamic range. Part 2 introduces between the inband 1-dB compression point advantage of being relatively easy to measure comprehensive measurements that attempt and the minimum-receivable signal level. without ambiguity but, unfortunately, it to characterize a receiver’s dynamic range as The compression point is obvious enough; assumes that the receiver has only a single a single number. however, the minimum-receivable signal signal at its input and that the signal is must be identified. desired. For deep-space receivers, this may be COMPREHENSIVE MEASURE- a reasonable assumption, but the terrestrial MENTS There are a number of candidates for mini- mum-receivable signal level, including: sphere is not usually so benign. For specifi- The following receiver measurements and “minimum-discernable signal” (MDS), tan- cation of general-purpose receivers, some specifications attempt to define overall gential sensitivity, 10-dB SNR, and receiver interfering signals must be assumed, and this receiver dynamic range as a single number noise floor. Both MDS and tangential sensi- is what the other definitions of receiver which can be used both to predict overall tivity are based on subjective judgments of dynamic range do. receiver performance and as a figure of merit signal strength, which differ significantly to compare competing receivers. -

Ultra HD Playout & Delivery
Ultra HD Playout & Delivery SOLUTION BRIEF The next major advancement in television has arrived: Ultra HD. By 2020 more than 40 million consumers around the world are projected to be watching close to 250 linear UHD channels, a figure that doesn’t include VOD (video-on-demand) or OTT (over-the-top) UHD services. A complete UHD playout and delivery solution from Harmonic will help you to meet that demand. 4K UHD delivers a screen resolution four times that of 1080p60. Not to be confused with the 4K digital cinema format, a professional production and cinema standard with a resolution of 4096 x 2160, UHD is a broadcast and OTT standard with a video resolution of 3840 x 2160 pixels at 24/30 fps and 8-bit color sampling. Second-generation UHD specifications will reach a frame rate of 50/60 fps at 10 bits. When combined with advanced technologies such as high dynamic range (HDR) and wide color gamut (WCG), the home viewing experience will be unlike anything previously available. The expected demand for UHD content will include all types of programming, from VOD movie channels to live global sporting events such as the World Cup and Olympics. UHD-native channel deployments are already on the rise, including the first linear UHD channel in North America, NASA TV UHD, launched in 2015 via a partnership between Harmonic and NASA’s Marshall Space Flight Center. The channel highlights incredible imagery from the U.S. space program using an end-to-end UHD playout, encoding and delivery solution from Harmonic. The Harmonic UHD solution incorporates the latest developments in IP networking and compression technology, including HEVC (High- Efficiency Video Coding) signal transport and HDR enhancement. -

For the Falcon™ Range of Microphone Products (Ba5105)
Technical Documentation Microphone Handbook For the Falcon™ Range of Microphone Products Brüel&Kjær B K WORLD HEADQUARTERS: DK-2850 Nærum • Denmark • Telephone: +4542800500 •Telex: 37316 bruka dk • Fax: +4542801405 • e-mail: [email protected] • Internet: http://www.bk.dk BA 5105 –12 Microphone Handbook Revision February 1995 Brüel & Kjær Falcon™ Range of Microphone Products BA 5105 –12 Microphone Handbook Trademarks Microsoft is a registered trademark and Windows is a trademark of Microsoft Cor- poration. Copyright © 1994, 1995, Brüel & Kjær A/S All rights reserved. No part of this publication may be reproduced or distributed in any form or by any means without prior consent in writing from Brüel & Kjær A/S, Nærum, Denmark. 0 − 2 Falcon™ Range of Microphone Products Brüel & Kjær Microphone Handbook Contents 1. Introduction....................................................................................................................... 1 – 1 1.1 About the Microphone Handbook............................................................................... 1 – 2 1.2 About the Falcon™ Range of Microphone Products.................................................. 1 – 2 1.3 The Microphones ......................................................................................................... 1 – 2 1.4 The Preamplifiers........................................................................................................ 1 – 8 1 2. Prepolarized Free-field /2" Microphone Type 4188....................... 2 – 1 2.1 Introduction ................................................................................................................ -

Signal-To-Noise Ratio and Dynamic Range Definitions
Signal-to-noise ratio and dynamic range definitions The Signal-to-Noise Ratio (SNR) and Dynamic Range (DR) are two common parameters used to specify the electrical performance of a spectrometer. This technical note will describe how they are defined and how to measure and calculate them. Figure 1: Definitions of SNR and SR. The signal out of the spectrometer is a digital signal between 0 and 2N-1, where N is the number of bits in the Analogue-to-Digital (A/D) converter on the electronics. Typical numbers for N range from 10 to 16 leading to maximum signal level between 1,023 and 65,535 counts. The Noise is the stochastic variation of the signal around a mean value. In Figure 1 we have shown a spectrum with a single peak in wavelength and time. As indicated on the figure the peak signal level will fluctuate a small amount around the mean value due to the noise of the electronics. Noise is measured by the Root-Mean-Squared (RMS) value of the fluctuations over time. The SNR is defined as the average over time of the peak signal divided by the RMS noise of the peak signal over the same time. In order to get an accurate result for the SNR it is generally required to measure over 25 -50 time samples of the spectrum. It is very important that your input to the spectrometer is constant during SNR measurements. Otherwise, you will be measuring other things like drift of you lamp power or time dependent signal levels from your sample. -

High Dynamic Range Ultrasound Imaging
The final publication is available at http://link.springer.com/article/10.1007/s11548-018-1729-3 Int J CARS manuscript No. (will be inserted by the editor) High Dynamic Range Ultrasound Imaging Alperen Degirmenci · Douglas P. Perrin · Robert D. Howe Received: 26 January 2018 Abstract Purpose High dynamic range (HDR) imaging is a popular computational photography technique that has found its way into every modern smartphone and camera. In HDR imaging, images acquired at different exposures are combined to increase the luminance range of the final image, thereby extending the limited dynamic range of the camera. Ultrasound imaging suffers from limited dynamic range as well; at higher power levels, the hyperechogenic tissue is overexposed, whereas at lower power levels, hypoechogenic tissue details are not visible. In this work, we apply HDR techniques to ultrasound imaging, where we combine ultrasound images acquired at different power levels to improve the level of detail visible in the final image. Methods Ultrasound images of ex vivo and in vivo tissue are acquired at different acoustic power levels and then combined to generate HDR ultrasound (HDR-US) images. The performance of five tone mapping operators is quantitatively evaluated using a similarity metric to determine the most suitable mapping for HDR-US imaging. Results The ex vivo and in vivo results demonstrated that HDR-US imaging enables visualizing both hyper- and hypoechogenic tissue at once in a single image. The Durand tone mapping operator preserved the most amount of detail across the dynamic range. Conclusions Our results strongly suggest that HDR-US imaging can improve the utility of ultrasound in image-based diagnosis and procedure guidance. -

JPEG-HDR: a Backwards-Compatible, High Dynamic Range Extension to JPEG
JPEG-HDR: A Backwards-Compatible, High Dynamic Range Extension to JPEG Greg Ward Maryann Simmons BrightSide Technologies Walt Disney Feature Animation Abstract What we really need for HDR digital imaging is a compact The transition from traditional 24-bit RGB to high dynamic range representation that looks and displays like an output-referred (HDR) images is hindered by excessively large file formats with JPEG, but holds the extra information needed to enable it as a no backwards compatibility. In this paper, we demonstrate a scene-referred standard. The next generation of HDR cameras simple approach to HDR encoding that parallels the evolution of will then be able to write to this format without fear that the color television from its grayscale beginnings. A tone-mapped software on the receiving end won’t know what to do with it. version of each HDR original is accompanied by restorative Conventional image manipulation and display software will see information carried in a subband of a standard output-referred only the tone-mapped version of the image, gaining some benefit image. This subband contains a compressed ratio image, which from the HDR capture due to its better exposure. HDR-enabled when multiplied by the tone-mapped foreground, recovers the software will have full access to the original dynamic range HDR original. The tone-mapped image data is also compressed, recorded by the camera, permitting large exposure shifts and and the composite is delivered in a standard JPEG wrapper. To contrast manipulation during image editing in an extended color naïve software, the image looks like any other, and displays as a gamut. -
Preview Only
AES-6id-2006 (r2011) AES information document for digital audio - Personal computer audio quality measurements Published by Audio Engineering Society, Inc. Copyright © 2006 by the Audio Engineering Society Preview only Abstract This document focuses on the measurement of audio quality specifications in a PC environment. Each specification listed has a definition and an example measurement technique. Also included is a detailed description of example test setups to measure each specification. An AES standard implies a consensus of those directly and materially affected by its scope and provisions and is intended as a guide to aid the manufacturer, the consumer, and the general public. An AES information document is a form of standard containing a summary of scientific and technical information; originated by a technically competent writing group; important to the preparation and justification of an AES standard or to the understanding and application of such information to a specific technical subject. An AES information document implies the same consensus as an AES standard. However, dissenting comments may be published with the document. The existence of an AES standard or AES information document does not in any respect preclude anyone, whether or not he or she has approved the document, from manufacturing, marketing, purchasing, or using products, processes, or procedures not conforming to the standard. Attention is drawn to the possibility that some of the elements of this AES standard or information document may be the subject of patent rights. AES shall not be held responsible for identifying any or all such patents. This document is subject to periodicwww.aes.org/standards review and users are cautioned to obtain the latest edition and printing. -

Senior Tech Tuesday 11 Iphone Camera App Tour
More Info: Links.SeniorTechClub.com/Tuesdays Welcome to Senior Tech Tuesday Live: 1/19/2021 Photography Series Tour of the Camera App Don Frederiksen Our Tuesday Focus ➢A Tour of the Camera App - Getting Beyond Point & Shoot ➢Selfies ➢Flash ➢Zoom ➢HDR is Good ➢What is a Live Photo ➢Focus & Exposure ➢Filters ➢Better iPhone Photography Tip ➢What’s Next www.SeniorTechClub.com Zoom Setup Zoom Speaker View Computer iPad or laptop Laptop www.SeniorTechClub.com Our Learning Tools ◦ Zoom Video Platform ◦ Slides – Downloadable from class page ◦ Demonstrations ◦ Your Questions ◦ “Hey Don” or Chat ◦ Email: [email protected] ◦ Online Class Page at: Links.SeniorTechClub.com/STT11 ◦ Tuesdays Page for Future Topics Links.SeniorTechClub.com/tuesdays www.SeniorTechClub.com Our Class Page Find our class page at: ◦ Links.SeniorTechClub.com/STT11 ◦ Bottom of the Tuesday page Purpose of the Class Page ◦ Relevant Information ◦ Fill in gaps from the online session ◦ Participate w/o being online www.SeniorTechClub.com Tour of our Class Page Slide Deck Video Archive Links & Resources Recipes & Nuggets www.SeniorTechClub.com A Tour of the Camera App Poll www.SeniorTechClub.com A Tour of the Camera App - Classic www.SeniorTechClub.com A Tour of the Camera App - New www.SeniorTechClub.com Switch Camera - Selfie Reminder: Long Press Shortcut Zoom Two kinds of zoom on iPhones Optical Zoom via a Lens Zoom Digital Zoom via a Pinch Better to zoom with your feet then digital Zoom Digital Zoom – Pinch Screen in or out Optical ◦ If your iPhone has more than one lens, tap: ◦ .5x or 1x or 2x (varies by model) Flash Focus & Exposure HDR Photos High Dynamic Range iPhone takes multiple photos to balance shadows and highlights. -

JPEG Compatible Coding of High Dynamic Range Imagery Using Tone Mapping Operators
JPEG Compatible Coding of High Dynamic Range Imagery using Tone Mapping Operators Min Chen1, Guoping Qiu1, Zhibo Chen2 and Charles Wang2 1School of Computer Science, The University of Nottingham, UK 2Thomson Broadband R&D (Beijing) Co., Ltd, China Abstract. In this paper, we introduce a new method for HDR imaging remain. For example, to display HDR compressing high dynamic range (HDR) imageries. Our images in conventional CRT or print HDR image on method exploits the fact that tone mapping is a necessary paper, the dynamic range of the image has to be operation for displaying HDR images on low dynamic compressed or the HDR image has to be tone mapped. range (LDR) reproduction media and seamlessly Even though there has been several tone mapping integrates tone mapping with a well-established image methods in the literature [3 - 12], non so far can compression standard to produce a HDR image universally produce satisfactorily results. Another huge compression technique that is backward compatible with challenge is efficient storage of HDR image. Compared established standards. We present a method to handle with conventional 24-bit/pixel images, HDR image is 96 color information so that HDR image can be gracefully bits/pixel and data is stored as 32-bit floating-point reconstructed from the tone mapped LDR image and numbers instead of 8-bit integer numbers. The data rate extra information stored with it. We present experimental using lossless coding, e.g, in OpenEXR [15], will be too results to demonstrate that the proposed technique works high especially when it comes to HDR video. -
Understanding Microphone Sensitivity by Jerad Lewis
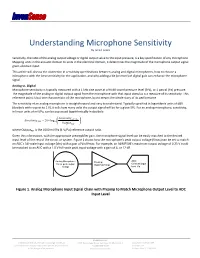
Understanding Microphone Sensitivity By Jerad Lewis Sensitivity, the ratio of the analog output voltage or digital output value to the input pressure, is a key specification of any microphone. Mapping units in the acoustic domain to units in the electrical domain, it determines the magnitude of the microphone output signal given a known input. This article will discuss the distinction in sensitivity specifications between analog and digital microphones, how to choose a microphone with the best sensitivity for the application, and why adding a bit (or more) of digital gain can enhance the microphone signal. Analog vs. Digital Microphone sensitivity is typically measured with a 1 kHz sine wave at a 94 dB sound pressure level (SPL), or 1 pascal (Pa) pressure. The magnitude of the analog or digital output signal from the microphone with that input stimulus is a measure of its sensitivity. This reference point is but one characteristic of the microphone, by no means the whole story of its performance. The sensitivity of an analog microphone is straightforward and easy to understand. Typically specified in logarithmic units of dBV (decibels with respect to 1 V), it tells how many volts the output signal will be for a given SPL. For an analog microphone, sensitivity, in linear units of mV/Pa, can be expressed logarithmically in decibels: Sensitivity = × mV / Pa Sensitivity dBV 20 log10 Output REF where OutputREF is the 1000 mV/Pa (1 V/Pa) reference output ratio. Given this information, with the appropriate preamplifier gain, the microphone signal level can be easily matched to the desired input level of the rest of the circuit or system. -

LIVE 15 Better Iphone Photos – Beyond Point
Welcome to Senior Tech Club Please Stand By! LIVE! We will begin at With Don Frederiksen 10 AM CDT Welcome to Senior Tech Club LIVE! With Don Frederiksen www.SeniorTechClub.com Today’s LIVE! Focus ➢The iPhone has a Great Camera ➢Getting Beyond Point & Click ➢Rule of Thirds for Composition ➢HDR is Good ➢What is a Live Photo ➢Video Mode ➢Pano ➢What’s Next Questions: Text to: 612-930-2226 or YouTube Chat Housekeeping & Rules ➢Pretend that we are sitting around the kitchen table. ➢I Cannot See You!! ➢I Cannot Hear You!! ➢Questions & Comments ➢Chat at the YouTube Site ➢Send me a text – 612-930-2226 ➢Follow-up Question Email: [email protected] Questions: Text to: 612-930-2226 or YouTube Chat The iPhone puts a Good Camera in your pocket Questions: Text to: 612-930-2226 or YouTube Chat The iPhone puts a Good Camera in your pocket For Inspiration: Ippawards.com/gallery Questions: Text to: 612-930-2226 or YouTube Chat Typical iPhone Photographer Actions: 1. Tap Camera icon 2. Tap Shutter Questions: Text to: 612-930-2226 or YouTube Chat The iPhone puts a Good Camera in your pocket Let’s Use it to the Max Questions: Text to: 612-930-2226 or YouTube Chat The Camera App Questions: Text to: 612-930-2226 or YouTube Chat Rule of Thirds Questions: Text to: 612-930-2226 or YouTube Chat Rule of Thirds Google Search of Photography Rule of Thirds Images Questions: Text to: 612-930-2226 or YouTube Chat iPhone Grid Support Questions: Text to: 612-930-2226 or YouTube Chat Turn on the Grid Launch the Settings app.