Chapter 4: a Look at Membrane and Thin Plate Theory
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

PLASTICITY Ct 4150 the Plastic Behaviour and the Calculation of Plates Subjected to Bending Prof. Ir. A.C.W.M. Vrouwenvelder
Technical University Delft Faculty of Civil Engineering and Geosciences PLASTICITY Ct 4150 The plastic behaviour and the calculation of plates subjected to bending Prof. ir. A.C.W.M. Vrouwenvelder Prof. ir. J. Witteveen March 2003 Ct 4150 Preface Course CT4150 is a Civil Engineering Masters Course in the field of Structural Plasticity for building types of structures. The course covers both plane frames and plates. Although most students will already be familiar with the basic concepts of plasticity, it has been decided to start the lecture notes on frames from the very beginning. Use has been made of rather dated but still valuable course material by Prof. J. Stark and Prof, J. Witteveen. After the first introductory sections the notes go into more advanced topics like the proof of the upper and lower bound theorems, the normality rule and rotation capacity requirements. The last chapters are devoted to the effects of normal forces and shear forces on the load carrying capacity, both for steel and for reinforced concrete frames. The concrete shear section is primarily based on the work by Prof. P. Nielsen from Lyngby and his co-workers. The lecture notes on plate structures are mainly devoted to the yield line theory for reinforced concrete slabs on the basis of the approach by K. W. Johansen. Additionally also consideration is given to general upper and lower bound solutions, both for steel and concrete, and the role plasticity may play in practical design. From the theoretical point of view there is ample attention for the correctness and limitations of yield line theory for reinforced concrete plates on the one side and von Mises and Tresca type of materials on the other side. -

A New Strategy for Treating Frictional Contact in S Heii Structures
A New Strategy for Treating Frictional Contact in Sheii Structures using Variational Inequalities Nagi El-Abbasi A thesis submitted in confomiity with the requirements for the degree of Doctor of Philosophy Graduate Department of Mechanical and Industrial Engineering University of Toronto 0 Copyright by Nagi El-Abbasi 1999 National Library Bibliotheque nationale du Canada Acquisitions and Acquisitions et Bbliographic Services services bibliographiques 395 WeUington Street 395, nie Wellington OttawaON K1AON4 OttawaON K1A ON4 Canada canada The author has granted a non- L'auteur a accordé une licence non exclusive licence dowing the exclusive permettant à la National Library of Canada to Bibliothèque nationale du Canada de reproduce, loan, distribute or seil reproduire, prêter, distribuer ou copies of this thesis in microform, vendre des copies de cette thèse sous paper or electronic formats. la forme de microfiche/fiim, de reproduction sur papier ou sur format électronique. The author retains ownership of the L'auteur conserve la propriété du copyright in this thesis. Neither the droit d'auteur qui protège cette thèse. thesis nor substantial extracts fiom it Ni la thèse ni des extraits substantiels may be printed or otherwise de celleci ne doivent être imprimés reproduced without the author's ou autrement reproduits sans son permission. autorisation. A New Strategy for Treating Frictional Contact in Shell Structures using Variational Inequalities Nagi Hosni El-Abbasi, Ph.D., 1999 Graduate Department of Mechanical and Industrial Engineering University of Toronto Abstract Contact plays a fundamental role in the deformation behaviour of shell structures. Despite their importance, however, contact effects are usually ignored andor oversimplified in finite element modelling. -

Introduction to Stiffness Analysis Stiffness Analysis Procedure
Introduction to Stiffness Analysis displacements. The number of unknowns in the stiffness method of The stiffness method of analysis is analysis is known as the degree of the basis of all commercial kinematic indeterminacy, which structural analysis programs. refers to the number of node/joint Focus of this chapter will be displacements that are unknown development of stiffness equations and are needed to describe the that only take into account bending displaced shape of the structure. deformations, i.e., ignore axial One major advantage of the member, a.k.a. slope-deflection stiffness method of analysis is that method. the kinematic degrees of freedom In the stiffness method of analysis, are well-defined. we write equilibrium equations in 1 2 terms of unknown joint (node) Definitions and Terminology Stiffness Analysis Procedure Positive Sign Convention: Counterclockwise moments and The steps to be followed in rotations along with transverse forces and displacements in the performing a stiffness analysis can positive y-axis direction. be summarized as: 1. Determine the needed displace- Fixed-End Forces: Forces at the “fixed” supports of the kinema- ment unknowns at the nodes/ tically determinate structure. joints and label them d1, d2, …, d in sequence where n = the Member-End Forces: Calculated n forces at the end of each element/ number of displacement member resulting from the unknowns or degrees of applied loading and deformation freedom. of the structure. 3 4 1 2. Modify the structure such that it fixed-end forces are vectorially is kinematically determinate or added at the nodes/joints to restrained, i.e., the identified produce the equivalent fixed-end displacements in step 1 all structure forces, which are equal zero. -

Force/Deflection Relationships
Introduction to Finite Element Dynamics ⎡ x x ⎤ 1. Element Stiffness Matrices u()x = ⎢1− ⎥ u = []C u (3) ⎣ L L ⎦ 1.1 Bar Element (iii) Derive Strain - Displacement Relationship Consider a bar element shown below. At the two by using Mechanics Theory2 ends of the bar, axially aligned forces [F1, F2] are The axial strain ε(x) is given by the following applied producing deflections [u ,u ]. What is the 1 2 relationship between applied force and deflection? du d ⎡ 1 1 ⎤ ε()x = = ()[]C u = []B u = ⎢− ⎥u (4) dx dx ⎣ L L ⎦ Deformed shape u2 u1 (iv) Derive Stress - Displacement Relationship by using Elasticity Theory The axial stresses σ (x) are given by the following assuming linear elasticity and homogeneity of F1 x F2 material throughout the bar element. Where E is Element Node the material modulus of elasticity. There are typically five key stages in the σ (x)(= Eε x)= E[]B u (5) 1 analysis . (v) Use principle of Virtual Work (i) Conjecture a displacement function There is equilibrium between WI , the internal The displacement function is usually an work done in deforming the bar, and WE , approximation, that is continuous and external work done by the movement of the differentiable, most usually a polynomial. u(x) is applied forces. The bar cross sectional area the axial deflections at any point x along the bar A = ∫∫dydz is assumed constant with respect to x. element. WI = ∫∫∫σ (x).ε (x)(dxdydz = ∫σ x).ε (x)dx∫∫dydz ⎡a1 ⎤ (6) u()x = a1 + a2 x = []1 x ⎢ ⎥ = [N] a (1) = A∫σ ()x .ε ()x dx ⎣a2 ⎦ ⎡F ⎤ W = []u u 1 = uT F (7) E 1 2 ⎢F ⎥ (ii) Express u()x in terms of nodal ⎣ 2 ⎦ displacements by using boundary conditions. -

Deflection of Beams Introduction
Deflection of Beams Introduction: In all practical engineering applications, when we use the different components, normally we have to operate them within the certain limits i.e. the constraints are placed on the performance and behavior of the components. For instance we say that the particular component is supposed to operate within this value of stress and the deflection of the component should not exceed beyond a particular value. In some problems the maximum stress however, may not be a strict or severe condition but there may be the deflection which is the more rigid condition under operation. It is obvious therefore to study the methods by which we can predict the deflection of members under lateral loads or transverse loads, since it is this form of loading which will generally produce the greatest deflection of beams. Assumption: The following assumptions are undertaken in order to derive a differential equation of elastic curve for the loaded beam 1. Stress is proportional to strain i.e. hooks law applies. Thus, the equation is valid only for beams that are not stressed beyond the elastic limit. 2. The curvature is always small. 3. Any deflection resulting from the shear deformation of the material or shear stresses is neglected. It can be shown that the deflections due to shear deformations are usually small and hence can be ignored. Consider a beam AB which is initially straight and horizontal when unloaded. If under the action of loads the beam deflect to a position A'B' under load or infact we say that the axis of the beam bends to a shape A'B'. -
Mechanics of Materials Chapter 6 Deflection of Beams
Mechanics of Materials Chapter 6 Deflection of Beams 6.1 Introduction Because the design of beams is frequently governed by rigidity rather than strength. For example, building codes specify limits on deflections as well as stresses. Excessive deflection of a beam not only is visually disturbing but also may cause damage to other parts of the building. For this reason, building codes limit the maximum deflection of a beam to about 1/360 th of its spans. A number of analytical methods are available for determining the deflections of beams. Their common basis is the differential equation that relates the deflection to the bending moment. The solution of this equation is complicated because the bending moment is usually a discontinuous function, so that the equations must be integrated in a piecewise fashion. Consider two such methods in this text: Method of double integration The primary advantage of the double- integration method is that it produces the equation for the deflection everywhere along the beams. Moment-area method The moment- area method is a semigraphical procedure that utilizes the properties of the area under the bending moment diagram. It is the quickest way to compute the deflection at a specific location if the bending moment diagram has a simple shape. The method of superposition, in which the applied loading is represented as a series of simple loads for which deflection formulas are available. Then the desired deflection is computed by adding the contributions of the component loads (principle of superposition). 6.2 Double- Integration Method Figure 6.1 (a) illustrates the bending deformation of a beam, the displacements and slopes are very small if the stresses are below the elastic limit. -

On Generalized Cosserat-Type Theories of Plates and Shells: a Short Review and Bibliography Johannes Altenbach, Holm Altenbach, Victor Eremeyev
On generalized Cosserat-type theories of plates and shells: a short review and bibliography Johannes Altenbach, Holm Altenbach, Victor Eremeyev To cite this version: Johannes Altenbach, Holm Altenbach, Victor Eremeyev. On generalized Cosserat-type theories of plates and shells: a short review and bibliography. Archive of Applied Mechanics, Springer Verlag, 2010, 80 (1), pp.73-92. hal-00827365 HAL Id: hal-00827365 https://hal.archives-ouvertes.fr/hal-00827365 Submitted on 29 May 2013 HAL is a multi-disciplinary open access L’archive ouverte pluridisciplinaire HAL, est archive for the deposit and dissemination of sci- destinée au dépôt et à la diffusion de documents entific research documents, whether they are pub- scientifiques de niveau recherche, publiés ou non, lished or not. The documents may come from émanant des établissements d’enseignement et de teaching and research institutions in France or recherche français ou étrangers, des laboratoires abroad, or from public or private research centers. publics ou privés. 74 J. Altenbach et al. and rotations (and by analogy of forces and couples or force and moment stresses) is stated, see, e.g., [307]. Historically the first scientist, who obtained similar results, was L. Euler. Discussing one of Langrange’s papers he established that the foundations of Mechanics are based on two principles: the principle of momentum and the principle of moment of momentum. Both principles results in the Eulerian laws of motion [307]. In [214] is given the following comment: the independence of the principle of moment of momentum, which is a generalization of the static equilibrium of the moments, was established by Jacob Bernoulli (1686) one year before Newton’s laws (1687). -

Ch. 8 Deflections Due to Bending
446.201A (Solid Mechanics) Professor Youn, Byeng Dong CH. 8 DEFLECTIONS DUE TO BENDING Ch. 8 Deflections due to bending 1 / 27 446.201A (Solid Mechanics) Professor Youn, Byeng Dong 8.1 Introduction i) We consider the deflections of slender members which transmit bending moments. ii) We shall treat statically indeterminate beams which require simultaneous consideration of all three of the steps (2.1) iii) We study mechanisms of plastic collapse for statically indeterminate beams. iv) The calculation of the deflections is very important way to analyze statically indeterminate beams and confirm whether the deflections exceed the maximum allowance or not. 8.2 The Moment – Curvature Relation ▶ From Ch.7 à When a symmetrical, linearly elastic beam element is subjected to pure bending, as shown in Fig. 8.1, the curvature of the neutral axis is related to the applied bending moment by the equation. ∆ = = = = (8.1) ∆→ ∆ For simplification, → ▶ Simplification i) When is not a constant, the effect on the overall deflection by the shear force can be ignored. ii) Assume that although M is not a constant the expressions defined from pure bending can be applied. Ch. 8 Deflections due to bending 2 / 27 446.201A (Solid Mechanics) Professor Youn, Byeng Dong ▶ Differential equations between the curvature and the deflection 1▷ The case of the large deflection The slope of the neutral axis in Fig. 8.2 (a) is = Next, differentiation with respect to arc length s gives = ( ) ∴ = → = (a) From Fig. 8.2 (b) () = () + () → = 1 + Ch. 8 Deflections due to bending 3 / 27 446.201A (Solid Mechanics) Professor Youn, Byeng Dong → = (b) (/) & = = (c) [(/)]/ If substitutng (b) and (c) into the (a), / = = = (8.2) [(/)]/ [()]/ ∴ = = [()]/ When the slope angle shown in Fig. -
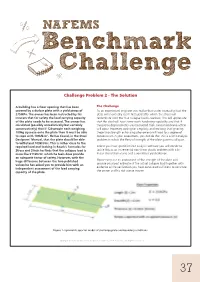
Challenge Problem 2 - the Solution
Challenge Problem 2 - The Solution A building has a floor opening that has been The Challenge covered by a durbar plate with a yield stress of As an experienced engineer you realise that under increasing load the 275MPa. The owner has been instructed by his plate will eventually reach first yield after which the stress will insurers that for safety the load carrying capacity redistribute until the final collapse load is reached. You will appreciate of the plate needs to be assessed. The owner has that the steel will have some work hardening capability and that if calculated (possibly unrealistically but certainly transverse displacements are considered then some membrane action conservatively) that if 120 people each weighing will occur. However, opting for simplicity and realising that ignoring 100kg squeeze onto the plate then it must be able these two strength enhancing phenomena will lead to a degree of to cope with 100kN/m 2. He has found, in the Steel conservatism in your assessment, you decide that this is a limit analysis Designers’ Manual, that the plate should be able problem in which the flexural strength of the plate governs collapse. to withstand 103kN/m 2. This is rather close to the required load and looking in Roark’s Formulas for Unless you have specialist limit analysis software you will decide to Stress and Strain he finds that the collapse load is tackle this as an incremental non-linear plastic problem with a bi- more like 211kN/m 2 which he feels does provide linear stress/strain curve and a von Mises yield criterion. -

Ritz Variational Method for Bending of Rectangular Kirchhoff Plate Under Transverse Hydrostatic Load Distribution
Mathematical Modelling of Engineering Problems Vol. 5, No. 1, March, 2018, pp. 1-10 Journal homepage:http://iieta.org/Journals/MMEP Ritz variational method for bending of rectangular kirchhoff plate under transverse hydrostatic load distribution Clifford U. Nwoji1, Hyginus N. Onah1, Benjamin O. Mama1, Charles C. Ike2* 1 Dept of Civil Engineering,University of Nigeria, Nsukka, Enugu State, Nigeria 2Dept of Civil Engineering,Enugu State University of Science & Technology, Enugu State, Nigeria Corresponding Author Email: [email protected] https://doi.org/10.18280/mmep.050101 ABSTRACT Received: 12 Feburary 2018 In this study, the Ritz variational method was used to analyze and solve the bending Accepted: 15 March 2018 problem of simply supported rectangular Kirchhoff plate subject to transverse hydrostatic load distribution over the entire plate domain. The deflection function was chosen based Keywords: on double series of infinite terms as coordinate function that satisfy the geometric and Ritz variational method, Kirchhoff force boundary conditions and unknown generalized displacement parameters. Upon substitution into the total potential energy functional for homogeneous, isotropic plate, hydrostatic load distribution Kirchhoff plates, and evaluation of the integrals, the total potential energy functional was obtained in terms of the unknown generalized displacement parameters. The principle of minimization of the total potential energy was then applied to determine the unknown displacement parameters. Moment curvature relations were used to find the bending moments. It was found that the deflection functions and the bending moment functions obtained for the plate domain, and the values at the plate center were exactly identical as the solutions obtained by Timoshenko and Woinowsky-Krieger using the Navier series method. -

How Beam Deflection Works?
How Beam Deflection Works? Beams are in every home and in one sense are quite simple. The weight placed on them causes them to bend (deflect), and you just need to make sure they don’t deflect too much by choosing a large enough beam. As shown in the diagram below, a beam that is deflecting takes on a curved shape that you might mistakenly assume to be circular. So how do we figure out what shape the curvature takes in order to predict how much a beam will deflect under load? After all you cannot wait until the house is built to find out the beam deflects too much. A beam is generally considered to fail if it deflects more than 1 inch. Solution to How Deflection Works: The model for SIMPLY SUPPORTED beam deflection Initial conditions: y(0) = y(L) = 0 Simply supported is engineer-speak for it just sits on supports without any further attachment that might help with the deflection we are trying to avoid. The dashed curve represents the deflected beam of length L with left side at the point (0,0) and right at (L,0). We consider a random point on the curve P = (x,y) where the y-coordinate would be the deflection at a distance of x from the left end. Moment in engineering is a beams desire to rotate and is equal to force times distance M = Fd. If the beam is in equilibrium (not breaking) then the moment must be equal on each side of every point on the beam. -
Chapter 4 Deflection and Stiffness
Chapter 4 Deflection and Stiffness Faculty of Engineering Mechanical Dept. Chapter Outline Shigley’s Mechanical Engineering Design Spring Rate Elasticity – property of a material that enables it to regain its original configuration after deformation Spring – a mechanical element that exerts a force when deformed Nonlinear Nonlinear Linear spring stiffening spring softening spring Fig. 4–1 Shigley’s Mechanical Engineering Design Spring Rate Relation between force and deflection, F = F(y) Spring rate For linear springs, k is constant, called spring constant Shigley’s Mechanical Engineering Design Tension, Compression, and Torsion Total extension or contraction of a uniform bar in tension or compression Spring constant, with k = F/d Shigley’s Mechanical Engineering Design Tension, Compression, and Torsion Angular deflection (in radians) of a uniform solid or hollow round bar subjected to a twisting moment T Converting to degrees, and including J = pd4/32 for round solid Torsional spring constant for round bar Shigley’s Mechanical Engineering Design Deflection Due to Bending Curvature of beam subjected to bending moment M From mathematics, curvature of plane curve Slope of beam at any point x along the length If the slope is very small, the denominator of Eq. (4-9) approaches unity. Combining Eqs. (4-8) and (4-9), for beams with small slopes, Shigley’s Mechanical Engineering Design Deflection Due to Bending Recall Eqs. (3-3) and (3-4) Successively differentiating Shigley’s Mechanical Engineering Design Deflection Due to Bending 0.5 m (4-10) (4-11) (4-12) (4-13) (4-14) Fig. 4–2 Shigley’s Mechanical Engineering Design Example 4-1 Fig.