Lecture 9: Moving Frames in the Nonhomogenous Case: Frame Bundles
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Diagonal Lifts of Metrics to Coframe Bundle
Proceedings of the Institute of Mathematics and Mechanics, National Academy of Sciences of Azerbaijan Volume 44, Number 2, 2018, Pages 328{337 DIAGONAL LIFTS OF METRICS TO COFRAME BUNDLE HABIL FATTAYEV AND ARIF SALIMOV Abstract. In this paper the diagonal lift Dg of a Riemannian metric g ∗ of a manifold Mn to the coframe bundle F (Mn) is defined, Levi-Civita connection, Killing vector fields with respect to the metric Dg and also an almost paracomplex structures in the coframe bundle are studied. 1. Introduction The Riemannian metrics in the tangent bundle firstly has been investigated by the Sasaki [14]. Tondeur [16] and Sato [15] have constructed Riemannian metrics on the cotangent bundle, the construction being the analogue of the metric Sasaki for the tangent bundle. Mok [7] has defined so-called the diagonal lift of metric to the linear frame bundle, which is a Riemannian metric resembles the Sasaki metric of tangent bundle. Some properties and applications for the Riemannian metrics of the tangent, cotangent, linear frame and tensor bundles are given in [1-4,7-9,12,13]. This paper is devoted to the investigation of Riemannian metrics in the coframe bundle. In 2 we briefly describe the definitions and results that are needed later, after which the diagonal lift Dg of a Riemannian metric g is constructed in 3. The Levi-Civita connection of the metric Dg is determined in In 4. In 5 we consider Killing vector fields in coframe bundle with respect to Riemannian metric Dg. An almost paracomplex structures in the coframe bundle equipped with metric Dg are studied in 6. -

Isometry Types of Frame Bundles
Pacific Journal of Mathematics ISOMETRY TYPES OF FRAME BUNDLES WOUTER VAN LIMBEEK Volume 285 No. 2 December 2016 PACIFIC JOURNAL OF MATHEMATICS Vol. 285, No. 2, 2016 dx.doi.org/10.2140/pjm.2016.285.393 ISOMETRY TYPES OF FRAME BUNDLES WOUTER VAN LIMBEEK We consider the oriented orthonormal frame bundle SO.M/ of an oriented Riemannian manifold M. The Riemannian metric on M induces a canon- ical Riemannian metric on SO.M/. We prove that for two closed oriented Riemannian n-manifolds M and N, the frame bundles SO.M/ and SO.N/ are isometric if and only if M and N are isometric, except possibly in di- mensions 3, 4, and 8. This answers a question of Benson Farb except in dimensions 3, 4, and 8. 1. Introduction 393 2. Preliminaries 396 3. High dimensional isometry groups of manifolds 400 4. Geometric characterization of the fibers of SO.M/ ! M 403 5. Proof for M with positive constant curvature 415 6. Proof of the main theorem for surfaces 422 Acknowledgements 425 References 425 1. Introduction Let M be an oriented Riemannian manifold, and let X VD SO.M/ be the oriented orthonormal frame bundle of M. The Riemannian structure g on M induces in a canonical way a Riemannian metric gSO on SO.M/. This construction was first carried out by O’Neill[1966] and independently by Mok[1978], and is very similar to Sasaki’s[1958; 1962] construction of a metric on the unit tangent bundle of M, so we will henceforth refer to gSO as the Sasaki–Mok–O’Neill metric on SO.M/. -

Crystalline Topological Phases As Defect Networks
Crystalline topological phases as defect networks The MIT Faculty has made this article openly available. Please share how this access benefits you. Your story matters. Citation Else, Dominic V. and Ryan Thorngren. "Crystalline topological phases as defect networks." Physical Review B 99, 11 (March 2019): 115116 © 2019 American Physical Society As Published http://dx.doi.org/10.1103/PhysRevB.99.115116 Publisher American Physical Society Version Final published version Citable link http://hdl.handle.net/1721.1/120966 Terms of Use Article is made available in accordance with the publisher's policy and may be subject to US copyright law. Please refer to the publisher's site for terms of use. PHYSICAL REVIEW B 99, 115116 (2019) Editors’ Suggestion Crystalline topological phases as defect networks Dominic V. Else Department of Physics, Massachusetts Institute of Technology, Cambridge, Massachusetts 02139, USA and Department of Physics, University of California, Santa Barbara, California 93106, USA Ryan Thorngren Department of Condensed Matter Physics, Weizmann Institute of Science, Rehovot 7610001, Israel and Department of Mathematics, University of California, Berkeley, California 94720, USA (Received 10 November 2018; published 14 March 2019) A crystalline topological phase is a topological phase with spatial symmetries. In this work, we give a very general physical picture of such phases: A topological phase with spatial symmetry G (with internal symmetry Gint G) is described by a defect network,aG-symmetric network of defects in a topological phase with internal symmetry Gint. The defect network picture works both for symmetry-protected topological (SPT) and symmetry-enriched topological (SET) phases, in systems of either bosons or fermions. -

Math 704: Part 1: Principal Bundles and Connections
MATH 704: PART 1: PRINCIPAL BUNDLES AND CONNECTIONS WEIMIN CHEN Contents 1. Lie Groups 1 2. Principal Bundles 3 3. Connections and curvature 6 4. Covariant derivatives 12 References 13 1. Lie Groups A Lie group G is a smooth manifold such that the multiplication map G × G ! G, (g; h) 7! gh, and the inverse map G ! G, g 7! g−1, are smooth maps. A Lie subgroup H of G is a subgroup of G which is at the same time an embedded submanifold. A Lie group homomorphism is a group homomorphism which is a smooth map between the Lie groups. The Lie algebra, denoted by Lie(G), of a Lie group G consists of the set of left-invariant vector fields on G, i.e., Lie(G) = fX 2 X (G)j(Lg)∗X = Xg, where Lg : G ! G is the left translation Lg(h) = gh. As a vector space, Lie(G) is naturally identified with the tangent space TeG via X 7! X(e). A Lie group homomorphism naturally induces a Lie algebra homomorphism between the associated Lie algebras. Finally, the universal cover of a connected Lie group is naturally a Lie group, which is in one to one correspondence with the corresponding Lie algebras. Example 1.1. Here are some important Lie groups in geometry and topology. • GL(n; R), GL(n; C), where GL(n; C) can be naturally identified as a Lie sub- group of GL(2n; R). • SL(n; R), O(n), SO(n) = O(n) \ SL(n; R), Lie subgroups of GL(n; R). -

Notes on Principal Bundles and Classifying Spaces
Notes on principal bundles and classifying spaces Stephen A. Mitchell August 2001 1 Introduction Consider a real n-plane bundle ξ with Euclidean metric. Associated to ξ are a number of auxiliary bundles: disc bundle, sphere bundle, projective bundle, k-frame bundle, etc. Here “bundle” simply means a local product with the indicated fibre. In each case one can show, by easy but repetitive arguments, that the projection map in question is indeed a local product; furthermore, the transition functions are always linear in the sense that they are induced in an obvious way from the linear transition functions of ξ. It turns out that all of this data can be subsumed in a single object: the “principal O(n)-bundle” Pξ, which is just the bundle of orthonormal n-frames. The fact that the transition functions of the various associated bundles are linear can then be formalized in the notion “fibre bundle with structure group O(n)”. If we do not want to consider a Euclidean metric, there is an analogous notion of principal GLnR-bundle; this is the bundle of linearly independent n-frames. More generally, if G is any topological group, a principal G-bundle is a locally trivial free G-space with orbit space B (see below for the precise definition). For example, if G is discrete then a principal G-bundle with connected total space is the same thing as a regular covering map with G as group of deck transformations. Under mild hypotheses there exists a classifying space BG, such that isomorphism classes of principal G-bundles over X are in natural bijective correspondence with [X, BG]. -

WHAT IS a CONNECTION, and WHAT IS IT GOOD FOR? Contents 1. Introduction 2 2. the Search for a Good Directional Derivative 3 3. F
WHAT IS A CONNECTION, AND WHAT IS IT GOOD FOR? TIMOTHY E. GOLDBERG Abstract. In the study of differentiable manifolds, there are several different objects that go by the name of \connection". I will describe some of these objects, and show how they are related to each other. The motivation for many notions of a connection is the search for a sufficiently nice directional derivative, and this will be my starting point as well. The story will by necessity include many supporting characters from differential geometry, all of whom will receive a brief but hopefully sufficient introduction. I apologize for my ungrammatical title. Contents 1. Introduction 2 2. The search for a good directional derivative 3 3. Fiber bundles and Ehresmann connections 7 4. A quick word about curvature 10 5. Principal bundles and principal bundle connections 11 6. Associated bundles 14 7. Vector bundles and Koszul connections 15 8. The tangent bundle 18 References 19 Date: 26 March 2008. 1 1. Introduction In the study of differentiable manifolds, there are several different objects that go by the name of \connection", and this has been confusing me for some time now. One solution to this dilemma was to promise myself that I would some day present a talk about connections in the Olivetti Club at Cornell University. That day has come, and this document contains my notes for this talk. In the interests of brevity, I do not include too many technical details, and instead refer the reader to some lovely references. My main references were [2], [4], and [5]. -

Moving Parseval Frames for Vector Bundles
Houston Journal of Mathematics c 2014 University of Houston Volume 40, No. 3, 2014 MOVING PARSEVAL FRAMES FOR VECTOR BUNDLES D. FREEMAN, D. POORE, A. R. WEI, AND M. WYSE Communicated by Vern I. Paulsen Abstract. Parseval frames can be thought of as redundant or linearly de- pendent coordinate systems for Hilbert spaces, and have important appli- cations in such areas as signal processing, data compression, and sampling theory. We extend the notion of a Parseval frame for a fixed Hilbert space to that of a moving Parseval frame for a vector bundle over a manifold. Many vector bundles do not have a moving basis, but in contrast to this every vector bundle over a paracompact manifold has a moving Parseval frame. We prove that a sequence of sections of a vector bundle is a moving Parseval frame if and only if the sections are the orthogonal projection of a moving orthonormal basis for a larger vector bundle. In the case that our vector bundle is the tangent bundle of a Riemannian manifold, we prove that a sequence of vector fields is a Parseval frame for the tangent bundle of a Riemannian manifold if and only if the vector fields are the orthogonal projection of a moving orthonormal basis for the tangent bundle of a larger Riemannian manifold. 1. Introduction Frames for Hilbert spaces are essentially redundant coordinate systems. That is, every vector can be represented as a series of scaled frame vectors, but the series is not unique. Though this redundancy is not necessary in a coordinate system, it can actually be very useful. -

The Affine Connection Structure of the Charged Symplectic 2-Form(1991)
On the Affine Connection Structure of the Charged Symplectic 2-Form† L. K. Norris‡ ABSTRACT It is shown that the charged symplectic form in Hamiltonian dynamics of classical charged particles in electromagnetic fields defines a generalized affine connection on an affine frame bundle associated with spacetime. Conversely, a generalized affine connection can be used to construct a symplectic 2-form if the associated linear connection is torsion– free and the anti-symmetric part of the R4∗ translational connection is locally derivable from a potential. Hamiltonian dynamics for classical charged particles in combined gravi- tational and electromagnetic fields can therefore be reformulated as a P (4) = O(1, 3)⊗R4∗ geometric theory with phase space the affine cotangent bundle AT ∗M of spacetime. The source-free Maxwell equations are reformulated as a pair of geometrical conditions on the R4∗ curvature that are exactly analogous to the source-free Einstein equations. †International Journal of Theoretical Physics, 30, pp. 1127-1150 (1991) ‡Department of Mathematics, Box 8205, North Carolina State University, Raleigh, NC 27695-8205 1 1. Introduction The problem of geometrizing the relativistic classical mechanics of charged test par- ticles in curved spacetime is closely related to the larger problem of finding a geometrical unification of the gravitational and electromagnetic fields. In a geometrically unified theory one would expect the equations of motion of classical charged test particles to be funda- mental to the geometry in a way analogous to the way uncharged test particle trajectories are geometrized as linear geodesics in general relativity. Since a satisfactory unified theory should contain the known observational laws of mechanics in some appropriate limit, one can gain insight into the larger unification problem by analyzing the geometrical founda- tions of classical mechanics. -

Almost Complex Structures and Obstruction Theory
ALMOST COMPLEX STRUCTURES AND OBSTRUCTION THEORY MICHAEL ALBANESE Abstract. These are notes for a lecture I gave in John Morgan's Homotopy Theory course at Stony Brook in Fall 2018. Let X be a CW complex and Y a simply connected space. Last time we discussed the obstruction to extending a map f : X(n) ! Y to a map X(n+1) ! Y ; recall that X(k) denotes the k-skeleton of X. n+1 There is an obstruction o(f) 2 C (X; πn(Y )) which vanishes if and only if f can be extended to (n+1) n+1 X . Moreover, o(f) is a cocycle and [o(f)] 2 H (X; πn(Y )) vanishes if and only if fjX(n−1) can be extended to X(n+1); that is, f may need to be redefined on the n-cells. Obstructions to lifting a map p Given a fibration F ! E −! B and a map f : X ! B, when can f be lifted to a map g : X ! E? If X = B and f = idB, then we are asking when p has a section. For convenience, we will only consider the case where F and B are simply connected, from which it follows that E is simply connected. For a more general statement, see Theorem 7.37 of [2]. Suppose g has been defined on X(n). Let en+1 be an n-cell and α : Sn ! X(n) its attaching map, then p ◦ g ◦ α : Sn ! B is equal to f ◦ α and is nullhomotopic (as f extends over the (n + 1)-cell). -

The First and Second Stiefel-Whitney Classes; Orientation and Spin Structure
The first and second Stiefel-Whitney classes; orientation and spin structure Robert Hines December 6, 2017 Classifying spaces and universal bundles Theorem 1. Given a topological group G, there is a space BG and a principal G-bundle EG such that for any space B (homotopy equivalent to a CW-complex), the principal G-bundles on B are in bijection with homotopy classes of maps f : B ! BG via pullback. I.e., given a principal G-bundle E ! B, there exists a map f : B ! BG such that f ∗EG =∼ E and f ∗EG =∼ g∗EG if and only if f and g are homotopy equivalent. 1 k For G = O(n), we can take BG = Grn(R ), a limit of the Grassmann manifolds Grn(R ) k 1 k of n-planes in R . Above this we have EG = Vn(R ), a limit of the Stiefel manifolds Vn(R ) of k orthogonal n-frames in R . The map EG ! BG is given by forgetting the framing. The fiber is clearly O(n). Stiefel-Whitney classes Vaguely, characteristic classes are cohomology classes associated to vector bundles (functorially) ∗ over a space B. We will be concerned with the Stiefel-Whitney classes in H (B; F2) associated to real vector bundles over B. These are mod 2 reductions of obstructions to finding (n − i + 1) linearly independent sections of an n-dimensional vector bundle over the i skeleton of B. i Theorem 2 ([M], Chapter 23). There are characteristic classes wi(ξ) 2 H (B; F2) associated to an n-dimensional real vector bundle ξ : E ! B that satisfy and are uniquely determined by • w0(ξ) = 1 and wi(ξ) = 0 for i > dim ξ, • wi(ξ ⊕ ) = wi(ξ) where is the trivial line bundle R × B, 1 • w1(γ1) 6= 0 where γ1 is the universal line bundle over RP , Pi • wi(ξ ⊕ ζ) = j=0 wj(ξ) [ wi−j(ζ). -

1. Complex Vector Bundles and Complex Manifolds Definition 1.1. A
1. Complex Vector bundles and complex manifolds n Definition 1.1. A complex vector bundle is a fiber bundle with fiber C and structure group GL(n; C). Equivalently, it is a real vector bundle E together with a bundle automor- phism J : E −! E satisfying J 2 = −id. (this is because any vector space with a linear map 2 n J satisfying J = −id has an real basis identifying it with C and J with multiplication by i). The map J is called a complex structure on E. An almost complex structure on a manifold M is a complex structure on E. An almost complex manifold is a manifold together with an almost complex structure. n Definition 1.2. A complex manifold is a manifold with charts τi : Ui −! C which are n −1 homeomorphisms onto open subsets of C and chart changing maps τi ◦ τj : τj(Ui \ Uj) −! τi(Ui \ Uj) equal to biholomorphisms. Holomorphic maps between complex manifolds are defined so that their restriction to each chart is holomorphic. Note that a complex manifold is an almost complex manifold. We have a partial converse to this theorem: Theorem 1.3. (Newlander-Nirenberg)(we wont prove this). An almost complex manifold (M; J) is a complex manifold if: [J(v);J(w)] = J([v; Jw]) + J[J(v); w] + [v; w] for all smooth vector fields v; w. Definition 1.4. A holomorphic vector bundle π : E −! B is a complex manifold E together with a complex base B so that the transition data: Φij : Ui \ Uj −! GL(n; C) are holomorphic maps (here GL(n; C) is a complex vector space). -
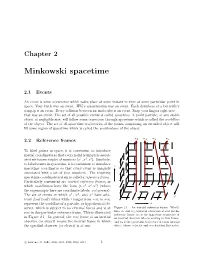
Chapter 2: Minkowski Spacetime
Chapter 2 Minkowski spacetime 2.1 Events An event is some occurrence which takes place at some instant in time at some particular point in space. Your birth was an event. JFK's assassination was an event. Each downbeat of a butterfly’s wingtip is an event. Every collision between air molecules is an event. Snap your fingers right now | that was an event. The set of all possible events is called spacetime. A point particle, or any stable object of negligible size, will follow some trajectory through spacetime which is called the worldline of the object. The set of all spacetime trajectories of the points comprising an extended object will fill some region of spacetime which is called the worldvolume of the object. 2.2 Reference frames w 1 w 2 w 3 w 4 To label points in space, it is convenient to introduce spatial coordinates so that every point is uniquely associ- ated with some triplet of numbers (x1; x2; x3). Similarly, to label events in spacetime, it is convenient to introduce spacetime coordinates so that every event is uniquely t associated with a set of four numbers. The resulting spacetime coordinate system is called a reference frame . Particularly convenient are inertial reference frames, in which coordinates have the form (t; x1; x2; x3) (where the superscripts here are coordinate labels, not powers). The set of events in which x1, x2, and x3 have arbi- x 1 trary fixed (real) values while t ranges from −∞ to +1 represent the worldline of a particle, or hypothetical ob- x 2 server, which is subject to no external forces and is at Figure 2.1: An inertial reference frame.