The Effect of Core Stability on Running Mechanics in Novice Runners
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Isometric Contractions and the Plank Same Length Muscles Worked
Isometric Contractions and the Plank If you've ever seen a mime trying to escape his invisible box, you've seen a playful example of an isometric contraction. Isometric exercises are strength-training exercises that involve the contraction of a muscle against an immovable resistance. While the mime's resistance is imaginary, you use the floor for resistance when doing an isometric plank. The isometric plank exercise provides core stability, improves posture and protects your lower back. Same Length “Iso” means same and “metric” means length, so isometric literally means “same length.” The static tension of isometric exercise strengthens the muscles at the same length -- in the position in which they are held. This can be beneficial when rehabilitating an injured joint or as a technique to improve fluid movement by overcoming weaknesses within a range of motion. It's also a good exercise technique for training the core muscles, which often must remain stable as your arms and legs move. Because isometric exercises don't move the joint through a full range of motion, you should hold isometric contractions in various positions and at varying angles to obtain maximum benefit. Muscles Worked To safely maintain the plank pose, you have to pull your belly button up toward your spine. This action, called abdominal hollowing, activates the deeper, stabilizing muscles of the core. The muscles that benefit most from an isometric plank are the transverse abdominis, obliques, rectus abdominis and erector spinae. Depending on the position you hold, the plank pose may also strengthen muscles in your wrists, arms, shoulders, chest, feet, legs and buttocks. -

A Literature Review How the Stability of the Pelvic Floor Complex Affects the Lumbar Spine By: Abigail Scheer Faculty Advisor: D
A Literature Review How the Stability of the Pelvic Floor Complex Affects the Lumbar Spine By: Abigail Scheer Faculty Advisor: Dr. Brett Winchester 18 October 2013 ABSTRACT This literature review explores the connection between the pelvic floor muscle complex and the stability of the lumbo-pelvic region of the spine. The research analyzed depicts the role of the pelvic floor musculature in the function ability of a person’s core, and how acute low back pain can be diminished and controlled, with a reduction in the likelihood of recurring episodes, if proper stabilization exercises and rehabilitation training are instituted. Weakness of the pelvic floor can result from a myriad of triggers, which can be addressed by studying the operation tactics of a person’s underlying muscle groups, and finding the correct method of improving them. Key Words: pelvic floor muscles, PFM, low back pain, lumbo-pelvic instability, core stability, incontinence Scheer, A. Page 2 INTRODUCTION Pain centered on the lower back is a common phenomenon in the world. It is a condition that appears episodically and with no definite solution in sight. Eventually those thwarted with this ailment surrender to the pain and inconvenience, feeling that even if they win the battle of one flair-up, another incident is just around the corner. Low back pain has become a frequent and costly diagnosis that plagues roughly 38% of the population at some point during a lifetime. It is one of the top injuries to cause professional athletes to be benched during a match. As much as 30% of the professional athletic population has reported holding onto a low back complaint for multiple years.1 This complaint has become so engrained in the norm of everyday culture that a common turn of phrase when a situation goes awry or a person commits an unforgivable faux pas is to relate it to a “pain in the butt (or lumbo-pelvic region).” While low back pain is such a common diagnosis to be gifted, it is also one of the most mysterious when it comes to solving the case as to what the root cause is. -

Comparison of Lateral Abdominal Musculature Activation During
medicina Article Comparison of Lateral Abdominal Musculature Activation during Expiration with an Expiratory Flow Control Device Versus the Abdominal Drawing-in Maneuver in Healthy Women: A Cross-Sectional Observational Pilot Study Vanesa Abuín-Porras 1 , Paula Maldonado-Tello 1,Mónica de la Cueva-Reguera 1, David Rodríguez-Sanz 2 ,César Calvo-Lobo 2 , Daniel López-López 3 , Emmanuel Navarro-Flores 4 and Carlos Romero-Morales 1,* 1 Faculty of Sport Sciences, Universidad Europea de Madrid, Villaviciosa de Odón, 28670 Madrid, Spain; [email protected] (V.A.-P.); [email protected] (P.M.-T.); [email protected] (M.d.l.C.-R.) 2 Facultad de Enfermería, Fisioterapia y Podología, Universidad Complutense de Madrid, 28040 Madrid, Spain; [email protected] (D.R.-S.); [email protected] (C.C.-L.) 3 Research, Health and Podiatry Group, Department of Health Sciences, Faculty of Nursing and Podiatry, Universidade da Coruña. La Coruña, 15403 Ferrol, Spain; [email protected] 4 Department of Nursing, Faculty of Nursing and Podiatry, Frailty and Cognitive Impairment Organized Group (FROG). University of Valencia, 46001 Valencia, Spain; manu.navarrofl[email protected] * Correspondence: [email protected]; Tel.: +34-912-115-268 Received: 2 February 2020; Accepted: 15 February 2020; Published: 19 February 2020 Abstract: Background and Objectives: The purpose of the present study was to quantify and compare lateral abdominal musculature thickness, including the transverse abdominis (TrA), internal oblique (IO), and external oblique (EO) muscles, via rehabilitative ultrasound imaging (RUSI) during the use of the expiratory flow control device (EFCD) versus the classic abdominal drawing-in maneuver (ADIM). Materials and Methods: A cross-sectional observational pilot study. -

Effect of Latissimus Dorsi Muscle Strengthening in Mechanical Low Back Pain
International Journal of Science and Research (IJSR) ISSN: 2319-7064 ResearchGate Impact Factor (2018): 0.28 | SJIF (2019): 7.583 Effect of Latissimus Dorsi Muscle Strengthening in Mechanical Low Back Pain 1 2 Vishakha Vishwakarma , Dr. P. R. Suresh 1, 2PCPS & RC, People’s University, Bhopal (M.P.), India Abstract: Mechanical low back pain (MLBP) is one of the most common musculoskeletal pain syndromes, affecting up to 80% of people at some point during their lifetime. Sources of back pain are numerous, usually sought in as lesion of disc or facet joints at L4- L5 and L5-S1 levels. Studies have shown that 40% of all back pain is of thoracolumbar origin. The term meachnical low back pain also gives reassurance that there is no damage to the nerves or spinal pathology. The clinical presentation of mechanical low back pain usually the ages 18-55 years is in the lumbo sacral region. A study was conducted to evaluate the designed to check the effectiveness of Conventional Exercises alone in Mechanical low back pain and along with the latissimus dorsi muscle strengthening, data was collected from People’s hospital, Bhopal (age group-30-45 yr both male and female randomly) Keywords: Visual analog scale, Assessment chart, Treatment table, Data collection sheets, Essential stationery materials, Computer, SPSS Software etc. 1. Introduction Back pain is a primary to seek medical advice considering 80% of people suffering from back pain. Mechanical low back pain is defined as a result of minor intervertebral dysfunction and referred pain in the low back The latissimus dorsi is a large, flat muscle on the back that and hip region, and can often be confused with the other stretches to the sides, behind the arm, and is partly covered pathologies that may cause these symptoms.18 by the trapezius on the back near the midline, the word latissimus dorsi comes from Latin and its means, broadest muscle of the back dorsum means back. -

A Comparison of the Plank and Perfect Plank Using Electromyography
A COMPARISON OF THE PLANK AND PERFECT PLANK USING ELECTROMYOGRAPHY MATTHEW R. IVERS Bachelor of Science in Exercise Science Capital University December 2015 Submitted in partial fulfillment of requirements for the degree MASTER OF EDUCATION IN EXERCISE SCIENCE At CLEVELAND STATE UNIVERSITY May 4th 2017 We hereby approve this thesis for Matthew R. Ivers Candidate for the Master of Education in Exercise Science degree for the Department of Health and Human Performance and CLEVELAND STATE UNIVERSITY’s College of Graduate Studies by ________________________________________________ Thesis Chairperson, Dr. Kenneth Sparks ________________________________________________ Department & Date ________________________________________________ Thesis Committee Member, Dr. Douglas Wadja ________________________________________________ Department & Date ________________________________________________ Thesis Committee Member, Dr. Emily Kullman ________________________________________________ Department & Date ________________________________________________ Associate Dean of Student Services, Dr. Kristine Still ________________________________________________ Department & Date Date of Defense: May 4th, 2017 ii AKNOWLEDGEMENT I would like to thank my professors for their support throughout this process. To Dr. Sparks, Dr. Wadja, and Dr. Kullman, thank you guys for the support and guidance throughout the process. I could not have done this without you. To Paul Synenkyj, thank you for the opportunity to collaborate on this project. I believe that this is -
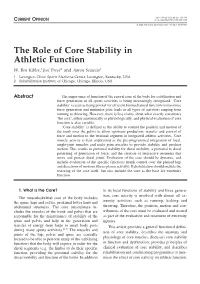
The Role of Core Stability in Athletic Function W
Sports Med 2006; 36 (3): 189-198 CURRENT OPINION 0112-1642/06/0003-0189/$39.95/0 2006 Adis Data Information BV. All rights reserved. The Role of Core Stability in Athletic Function W. Ben Kibler,1 Joel Press2 and Aaron Sciascia1 1 Lexington Clinic Sports Medicine Center, Lexington, Kentucky, USA 2 Rehabilitation Institute of Chicago, Chicago, Illinois, USA Abstract The importance of function of the central core of the body for stabilisation and force generation in all sports activities is being increasingly recognised. ‘Core stability’ is seen as being pivotal for efficient biomechanical function to maximise force generation and minimise joint loads in all types of activities ranging from running to throwing. However, there is less clarity about what exactly constitutes ‘the core’, either anatomically or physiologically, and physical evaluation of core function is also variable. ‘Core stability’ is defined as the ability to control the position and motion of the trunk over the pelvis to allow optimum production, transfer and control of force and motion to the terminal segment in integrated athletic activities. Core muscle activity is best understood as the pre-programmed integration of local, single-joint muscles and multi-joint muscles to provide stability and produce motion. This results in proximal stability for distal mobility, a proximal to distal patterning of generation of force, and the creation of interactive moments that move and protect distal joints. Evaluation of the core should be dynamic, and include evaluation of the specific functions (trunk control over the planted leg) and directions of motions (three-planar activity). Rehabilitation should include the restoring of the core itself, but also include the core as the base for extremity function. -

The Core’: Understanding It, and Retraining Its Dysfunction
+ MODEL Journal of Bodywork & Movement Therapies (2013) xx,1e19 Available online at www.sciencedirect.com journal homepage: www.elsevier.com/jbmt CLINICAL AND RESEARCH REVIEW ‘The core’: Understanding it, and retraining its dysfunction Josephine Key, MAPA, MMPAA, APAM*,1 Edgecliff Physiotherapy Sports and Spinal Centre, Suite 505 Eastpoint Tower, 180 Ocean Street Edgecliff, Sydney, NSW 2027, Australia Received 8 October 2012; received in revised form 7 February 2013; accepted 7 March 2013 KEYWORDS Summary “Core stability training” is popular in both the therapeutic and fitness industries Core strength; but what is actually meant and understood by this concept? And does everyone need the same Back pain; training approach? Pilates; This paper examines the landscape of ‘the core’ and its control from both a clinical and Yoga; research perspective. It attempts a comprehensive review of its healthy functional role and Injury prevention how this is commonly changed in people with spinal and pelvic girdle pain syndromes. The common clinically observable and palpable patterns of functional and structural change associated with ‘problems with the core’ have been relatively little described. This paper endeavors to do so, introducing a variant paradigm aimed at promoting the un- derstanding and management of these altered patterns of ‘core control’. Clinically, two basic subgroups emerge. In light of these, the predictable difficulties that each group finds in establishing the important fundamental elements of spino-pelvic ‘core con- trol’ and how to best retrain these, are highlighted. The integrated model presented is applicable for practitioners re-educating movement in phys- iotherapy, rehabilitation, Pilates, Yoga or injury prevention within the fitness industry in general. -

The Anatomy and Pathophysiology of the CORE
Robert A. Donatelli The Anatomy and Pathophysiology of the CORE LEARNING OBJECTIVES design a rehabilitation program to promote an increase in After studying this lesson, the reader will be able to do the strength, power, and endurance specific to the muscles and following: joints that are in a state of dysfunction. Specificity of the reha- 1. Define the hip and trunk CORE bilitation program can help the athlete overcome muscu- 2. Evaluate the CORE muscles and structure loskeletal system deficits and achieve maximum potentials of 3. Delineate the difference between local and global muscles his or her talents. A combination of power, strength, and on the back endurance is critical for the muscles of the CORE to allow the 4. Identify the muscles of the abdominal area that are con- athlete to perform at his or her maximum capabilities. sidered stabilizing The lower quadrant CORE is identified by the muscles, 5. Identify the spinal muscles that stiffen the spine ligaments, and fascia that produce a synchronous motion and 6. Evaluate the CORE dysfunction stability of the trunk, hip, and lower extremities. The initia- 7. Instruct patients in exercises designed to strength hip and tion of movement in the lower limb is a result of activation of trunk muscles certain muscles that hold onto bone, referred to as stabilizers, 8. Identify the correlation between muscle weakness in the and other muscles that move bone, referred to as mobilizers. The hip and lower extremity injuries muscle action within the CORE depends on a balanced activity of the stabilizers and mobilizers. If the stabilizers do not hold onto the bone, the mobilizing muscles will function at a dis- INTRODUCTION AND DEFINITION advantage. -

Effect of a Core Conditioning Program on Lumbar Paraspinal Area, Asymmetry and Pain Score in Military Working Dogs with Lumbosacral Pain
University of Tennessee, Knoxville TRACE: Tennessee Research and Creative Exchange Masters Theses Graduate School 12-2014 Effect of a Core Conditioning Program on Lumbar Paraspinal Area, Asymmetry and Pain Score in Military Working Dogs with Lumbosacral Pain Andrea Leigh Henderson University of Tennessee - Knoxville, [email protected] Follow this and additional works at: https://trace.tennessee.edu/utk_gradthes Part of the Small or Companion Animal Medicine Commons Recommended Citation Henderson, Andrea Leigh, "Effect of a Core Conditioning Program on Lumbar Paraspinal Area, Asymmetry and Pain Score in Military Working Dogs with Lumbosacral Pain. " Master's Thesis, University of Tennessee, 2014. https://trace.tennessee.edu/utk_gradthes/3155 This Thesis is brought to you for free and open access by the Graduate School at TRACE: Tennessee Research and Creative Exchange. It has been accepted for inclusion in Masters Theses by an authorized administrator of TRACE: Tennessee Research and Creative Exchange. For more information, please contact [email protected]. To the Graduate Council: I am submitting herewith a thesis written by Andrea Leigh Henderson entitled "Effect of a Core Conditioning Program on Lumbar Paraspinal Area, Asymmetry and Pain Score in Military Working Dogs with Lumbosacral Pain." I have examined the final electronic copy of this thesis for form and content and recommend that it be accepted in partial fulfillment of the requirements for the degree of Master of Science, with a major in Comparative and Experimental Medicine. Darryl L. Millis, Major Professor We have read this thesis and recommend its acceptance: Silke Hecht, Marti S. Drum Accepted for the Council: Carolyn R. -
Front Page Heading Core Stability Exercises
Core Stability Exercises FRONT PAGE HEADING MAIN HEADING Sub Headings Body Copy Body Copy + Bold Body Copy + Bold + Italic Body Copy + Normal + Italic Style Body for tables STYLE HEADING FOR TABLES CORE STABILITY EXERC ISES Neil Hopkins B.A. Sport Science (University of Stellenbosch) B.Sc. (med)(hons) Exercise Science (Biokinetics) (University of Cape Town) Registered Biokineticist (HPCSA) (BASA) Rehabilitation and Hydrotherapy Centre Vincent Pallotti Hospital Dick Williamson Medical Centre Lower Ground Level Alexander Rd Pinelands 7405 PostNet Suite 346 Private Bag x21 Howard Place 7450 021 532 3203 E-mail: [email protected] 0 Copyright BokSmart © 2009 Core Stability Exercises INTRODUCTION There are three phases of the core stability programme: Stage 1 – The cognitive stage; Stage 2 – The associative stage; and Stage 3 – The autonomous stage. Stage 1 is called the cognitive stage because it focuses on the retraining of the Transversus Abdominus muscle with conscious thought. The recruitment of the Transversus Abdominus is controlled directly by the brain and as a result there can be an immediate and measurable effect as a result of conscious activation. Stage 2 is the associative stage of the programme, which includes contraction of the Transversus Abdominus in conjunction with the activation of the more superficial abdominal muscles in order to strengthen the lower back musculature. Stage 3 is the autonomous stage because it focuses on unconscious activation of the Transversus Abdominus and the more superficial abdominal muscles whilst performing general conditioning and strengthening exercises. Each phase has varying levels of difficulty and has 16 categories of exercise. It is important to perform each exercise in a slow and controlled manner. -

Core Stability Exercises
CORE STABILITY EXERCISES I have included three levels of exercises. Please begin at level one to ensure you have the correct isolation of the deep abdominal muscles and a feel for how they work before progressing to the next level. I cannot stress enough how important technique and activation of the right muscles are when doing these exercises so please be mindful when performing these exercises. Start each exercise by finding neutral spine and drawing in your lower stomach. Remember these exercises are working your postural, endurance muscles surrounding your trunk so this workout will not be anything like the intensity of your swimming, cycling or running workouts. Try to relax and enjoy this part of your program. Leave yourself 30-40 minutes to complete these exercises. Please read the preparatory information on pelvic tilting and finding your neutral spine before you begin the core stability exercises below. CORE STABILITY EXERCISES Level 1 EXERCISE LEVEL 1 PHOTO 1. Lower Stomach to spine Stomach Lying flat on your back Feet on the floor, knees bent to 60 degrees Exercises Find your neutral spine position Holding that position, gently draw lower stomach to spine (30-40% effort only) Hold 5 sec, keep breathing Repeat 10-15 times 2. Leg Movements Continue in the same position as the exercise above Keeping that neutral position and drawing your lower stomach in Slowly lift one foot off the floor, keeping your knee bent and return Your hips should stay level and not drop as you lift your foot Breath in as you lift your foot and breath out as you place it down Repeat with the opposite leg Repeat 10-15 times each side 3. -

CORE ANATOMY ILLUSTRATED This Page Intentionally Left Blank CORE ANATOMY ILLUSTRATED
CORE ANATOMY ILLUSTRATED This page intentionally left blank CORE ANATOMY ILLUSTRATED Ian Parkin MB ChB Professor of Applied Clinical Anatomy, University of Dundee, and Royal College of Surgeons, Edinburgh; formerly Clinical Anatomist, University of Cambridge and Senior Lecturer in Anatomy, University of Birmingham Bari M Logan MA FMA Hon MBIE MAMAA Formerly University Prosector, Department of Anatomy, University of Cambridge; Prosector, Department of Anatomy, Royal College of Surgeons of England, London and Anatomical Preparator, Department of Human Morphology, University of Nottingham Medical School Mark J McCarthy MB ChBPhD FRCS (Eng) FRCS (Edin) Consultant Vascular Surgeon and Honorary Senior Lecturer, Department of Vascular and Endovascular Surgery, Leicester Royal Infirmary Hodder Arnold A MEMBER OF THE HODDER HEADLINE GROUP First published in Great Britain in 2007 by Hodder Arnold, an imprint of Hodder Education and a member of the Hodder Headline Group, an Hachette Livre UK Company, 338 Euston Road, London NW1 3BH http://www.hoddereducation.com © 2007 Ian Parkin, Bari M Logan, Mark J McCarthy All rights reserved. Apart from any use permitted under UK copyright law, this publication may only be reproduced, stored or transmitted, in any form, or by any means with prior permission in writing of the publishers or in the case of reprographic production in accordance with the terms of licences issued by the Copyright Licensing Agency. In the United Kingdom such licences are issued by the Copyright licensing Agency: Saffron House, 6–10 Kirby Street, London EC1N 8TS. Whilst the advice and information in this book are believed to be true and accurate at the date of going to press, neither the author[s] nor the publisher can accept any legal responsibility or liability for any errors or omissions that may be made.