K2: Extending Kepler's Power to the Ecliptic
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

The Nearest Stars: a Guided Tour by Sherwood Harrington, Astronomical Society of the Pacific
www.astrosociety.org/uitc No. 5 - Spring 1986 © 1986, Astronomical Society of the Pacific, 390 Ashton Avenue, San Francisco, CA 94112. The Nearest Stars: A Guided Tour by Sherwood Harrington, Astronomical Society of the Pacific A tour through our stellar neighborhood As evening twilight fades during April and early May, a brilliant, blue-white star can be seen low in the sky toward the southwest. That star is called Sirius, and it is the brightest star in Earth's nighttime sky. Sirius looks so bright in part because it is a relatively powerful light producer; if our Sun were suddenly replaced by Sirius, our daylight on Earth would be more than 20 times as bright as it is now! But the other reason Sirius is so brilliant in our nighttime sky is that it is so close; Sirius is the nearest neighbor star to the Sun that can be seen with the unaided eye from the Northern Hemisphere. "Close'' in the interstellar realm, though, is a very relative term. If you were to model the Sun as a basketball, then our planet Earth would be about the size of an apple seed 30 yards away from it — and even the nearest other star (alpha Centauri, visible from the Southern Hemisphere) would be 6,000 miles away. Distances among the stars are so large that it is helpful to express them using the light-year — the distance light travels in one year — as a measuring unit. In this way of expressing distances, alpha Centauri is about four light-years away, and Sirius is about eight and a half light- years distant. -
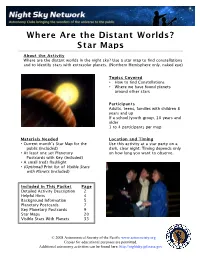
Where Are the Distant Worlds? Star Maps
W here Are the Distant Worlds? Star Maps Abo ut the Activity Whe re are the distant worlds in the night sky? Use a star map to find constellations and to identify stars with extrasolar planets. (Northern Hemisphere only, naked eye) Topics Covered • How to find Constellations • Where we have found planets around other stars Participants Adults, teens, families with children 8 years and up If a school/youth group, 10 years and older 1 to 4 participants per map Materials Needed Location and Timing • Current month's Star Map for the Use this activity at a star party on a public (included) dark, clear night. Timing depends only • At least one set Planetary on how long you want to observe. Postcards with Key (included) • A small (red) flashlight • (Optional) Print list of Visible Stars with Planets (included) Included in This Packet Page Detailed Activity Description 2 Helpful Hints 4 Background Information 5 Planetary Postcards 7 Key Planetary Postcards 9 Star Maps 20 Visible Stars With Planets 33 © 2008 Astronomical Society of the Pacific www.astrosociety.org Copies for educational purposes are permitted. Additional astronomy activities can be found here: http://nightsky.jpl.nasa.gov Detailed Activity Description Leader’s Role Participants’ Roles (Anticipated) Introduction: To Ask: Who has heard that scientists have found planets around stars other than our own Sun? How many of these stars might you think have been found? Anyone ever see a star that has planets around it? (our own Sun, some may know of other stars) We can’t see the planets around other stars, but we can see the star. -

Plotting Variable Stars on the H-R Diagram Activity
Pulsating Variable Stars and the Hertzsprung-Russell Diagram The Hertzsprung-Russell (H-R) Diagram: The H-R diagram is an important astronomical tool for understanding how stars evolve over time. Stellar evolution can not be studied by observing individual stars as most changes occur over millions and billions of years. Astrophysicists observe numerous stars at various stages in their evolutionary history to determine their changing properties and probable evolutionary tracks across the H-R diagram. The H-R diagram is a scatter graph of stars. When the absolute magnitude (MV) – intrinsic brightness – of stars is plotted against their surface temperature (stellar classification) the stars are not randomly distributed on the graph but are mostly restricted to a few well-defined regions. The stars within the same regions share a common set of characteristics. As the physical characteristics of a star change over its evolutionary history, its position on the H-R diagram The H-R Diagram changes also – so the H-R diagram can also be thought of as a graphical plot of stellar evolution. From the location of a star on the diagram, its luminosity, spectral type, color, temperature, mass, age, chemical composition and evolutionary history are known. Most stars are classified by surface temperature (spectral type) from hottest to coolest as follows: O B A F G K M. These categories are further subdivided into subclasses from hottest (0) to coolest (9). The hottest B stars are B0 and the coolest are B9, followed by spectral type A0. Each major spectral classification is characterized by its own unique spectra. -

Light Curve Analysis of Variable Stars Using Fourier Decomposition and Principal Component Analysis
A&A 507, 1729–1737 (2009) Astronomy DOI: 10.1051/0004-6361/200912851 & c ESO 2009 Astrophysics Light curve analysis of variable stars using Fourier decomposition and principal component analysis S. Deb1 andH.P.Singh1,2 1 Department of Physics & Astrophysics, University of Delhi, Delhi 110007, India e-mail: [email protected],[email protected] 2 CRAL-Observatoire de Lyon, CNRS UMR 142, 69561 Saint-Genis Laval, France Received 8 July 2009 / Accepted 1 September 2009 ABSTRACT Context. Ongoing and future surveys of variable stars will require new techniques to analyse their light curves as well as to tag objects according to their variability class in an automated way. Aims. We show the use of principal component analysis (PCA) and Fourier decomposition (FD) method as tools for variable star light curve analysis and compare their relative performance in studying the changes in the light curve structures of pulsating Cepheids and in the classification of variable stars. Methods. We have calculated the Fourier parameters of 17 606 light curves of a variety of variables, e.g., RR Lyraes, Cepheids, Mira Variables and extrinsic variables for our analysis. We have also performed PCA on the same database of light curves. The inputs to the PCA are the 100 values of the magnitudes for each of these 17 606 light curves in the database interpolated between phase 0 to 1. Unlike some previous studies, Fourier coefficients are not used as input to the PCA. Results. We show that in general, the first few principal components (PCs) are enough to reconstruct the original light curves compared to the FD method where 2 to 3 times more parameters are required to satisfactorily reconstruct the light curves. -

College of San Mateo Observatory Stellar Spectra Catalog ______
College of San Mateo Observatory Stellar Spectra Catalog SGS Spectrograph Spectra taken from CSM observatory using SBIG Self Guiding Spectrograph (SGS) ___________________________________________________ A work in progress compiled by faculty, staff, and students. Stellar Spectroscopy Stars are divided into different spectral types, which result from varying atomic-level activity on the star, due to its surface temperature. In spectroscopy, we measure this activity via a spectrograph/CCD combination, attached to a moderately sized telescope. The resultant data are converted to graphical format for further analysis. The main spectral types are characterized by the letters O,B,A,F,G,K, & M. Stars of O type are the hottest, as well as the rarest. Stars of M type are the coolest, and by far, the most abundant. Each spectral type is also divided into ten subtypes, ranging from 0 to 9, further delineating temperature differences. Type Temperature Color O 30,000 - 60,000 K Blue B 10,000 - 30,000 K Blue-white A 7,500 - 10,000 K White F 6,000 - 7,500 K Yellow-white G 5,000 - 6,000 K Yellow K 3,500 - 5,000 K Yellow-orange M >3,500 K Red Class Spectral Lines O -Weak neutral and ionized Helium, weak Hydrogen, a relatively smooth continuum with very few absorption lines B -Weak neutral Helium, stronger Hydrogen, an otherwise relatively smooth continuum A -No Helium, very strong Hydrogen, weak CaII, the continuum is less smooth because of weak ionized metal lines F -Strong Hydrogen, strong CaII, weak NaI, G-band, the continuum is rougher because of many ionized metal lines G -Weaker Hydrogen, strong CaII, stronger NaI, many ionized and neutral metals, G-band is present K -Very weak Hydrogen, strong CaII, strong NaI and many metals G- band is present M -Strong TiO molecular bands, strongest NaI, weak CaII very weak Hydrogen absorption. -

Monday, November 13, 2017 WHAT DOES IT MEAN to BE HABITABLE? 8:15 A.M. MHRGC Salons ABCD 8:15 A.M. Jang-Condell H. * Welcome C
Monday, November 13, 2017 WHAT DOES IT MEAN TO BE HABITABLE? 8:15 a.m. MHRGC Salons ABCD 8:15 a.m. Jang-Condell H. * Welcome Chair: Stephen Kane 8:30 a.m. Forget F. * Turbet M. Selsis F. Leconte J. Definition and Characterization of the Habitable Zone [#4057] We review the concept of habitable zone (HZ), why it is useful, and how to characterize it. The HZ could be nicknamed the “Hunting Zone” because its primary objective is now to help astronomers plan observations. This has interesting consequences. 9:00 a.m. Rushby A. J. Johnson M. Mills B. J. W. Watson A. J. Claire M. W. Long Term Planetary Habitability and the Carbonate-Silicate Cycle [#4026] We develop a coupled carbonate-silicate and stellar evolution model to investigate the effect of planet size on the operation of the long-term carbon cycle, and determine that larger planets are generally warmer for a given incident flux. 9:20 a.m. Dong C. F. * Huang Z. G. Jin M. Lingam M. Ma Y. J. Toth G. van der Holst B. Airapetian V. Cohen O. Gombosi T. Are “Habitable” Exoplanets Really Habitable? A Perspective from Atmospheric Loss [#4021] We will discuss the impact of exoplanetary space weather on the climate and habitability, which offers fresh insights concerning the habitability of exoplanets, especially those orbiting M-dwarfs, such as Proxima b and the TRAPPIST-1 system. 9:40 a.m. Fisher T. M. * Walker S. I. Desch S. J. Hartnett H. E. Glaser S. Limitations of Primary Productivity on “Aqua Planets:” Implications for Detectability [#4109] While ocean-covered planets have been considered a strong candidate for the search for life, the lack of surface weathering may lead to phosphorus scarcity and low primary productivity, making aqua planet biospheres difficult to detect. -

W359 E31 RS.Pdf
WOLF 359 "SÉCURITÉ" by Gabriel Urbina (Writer's Note: The following takes place on Day 864 of the Hephaestus Mission) INT. U.S.S. URANIA - FLIGHT DECK - 1400 HOURS We come in on the STEADY HUM of a ship's engine. There's various BEEPS and DINGS from a control console. Sharp-eared listeners might notice that things sound considerably sleeker and smoother than what we're used to. Someone TYPES into a console, and hits a SWITCH. There's a discrete burst of STATIC, followed by - JACOBI Sécurité, sécurité, sécurité. U.S.S. Hephaestus Station, this is the U.S.S. Urania. Be advised that we are on an intercept vector. Request you avoid any course corrections or exterior activity. Please advise your intentions. He hits a BUTTON. For a BEAT he just awaits the reply. JACOBI (CONT'D) Still no reply, sir. You really think someone's alive in there? I mean... look at that thing. It's only duct tape and sheer stubbornness keeping it together. KEPLER No. They're there. Rebroadcast, and transmit the command authentication codes. JACOBI Aye-aye. (hits the radio switch) Sécurité, sécurité, sécurité. U.S.S. Hephaestus, this is the U.S.S. Urania. I say again: we are on an approach vector to your current position. Authentication code: Victor-Uniform-Lima-Charlie- Alpha-November. Please advise your intentions. BEAT. And then - KRRRCH! MINKOWSKI (over radio receiver) U.S.S. Urania, this is Hephaestus Actual. Continue on current course, and use vector zero one decimal nine for your final approach. 2. JACOBI Copy that, Hephaestus Actual. -

Virgo the Virgin
Virgo the Virgin Virgo is one of the constellations of the zodiac, the group tion Virgo itself. There is also the connection here with of 12 constellations that lies on the ecliptic plane defined “The Scales of Justice” and the sign Libra which lies next by the planets orbital orientation around the Sun. Virgo is to Virgo in the Zodiac. The study of astronomy had a one of the original 48 constellations charted by Ptolemy. practical “time keeping” aspect in the cultures of ancient It is the largest constellation of the Zodiac and the sec- history and as the stars of Virgo appeared before sunrise ond - largest constellation after Hydra. Virgo is bordered by late in the northern summer, many cultures linked this the constellations of Bootes, Coma Berenices, Leo, Crater, asterism with crops, harvest and fecundity. Corvus, Hydra, Libra and Serpens Caput. The constella- tion of Virgo is highly populated with galaxies and there Virgo is usually depicted with angel - like wings, with an are several galaxy clusters located within its boundaries, ear of wheat in her left hand, marked by the bright star each of which is home to hundreds or even thousands of Spica, which is Latin for “ear of grain”, and a tall blade of galaxies. The accepted abbreviation when enumerating grass, or a palm frond, in her right hand. Spica will be objects within the constellation is Vir, the genitive form is important for us in navigating Virgo in the modern night Virginis and meteor showers that appear to originate from sky. Spica was most likely the star that helped the Greek Virgo are called Virginids. -

The Observer's Handbook for 1953
THE OBSERVER’S HANDBOOK FOR 1953 PUBLISHED BY The Royal Astronomical Society of Canada C. A. CHANT, E ditor RUTH J. NORTHCOTT, A s s is t a n t E ditor DAVID DUNLAP OBSERVATORY FORTY-FIFTH YEAR OF PUBLICATION P rice 50 C en ts TORONTO 3 Willcocks Street Printed for the Society By the University of Toronto Press THE ROYAL ASTRONOMICAL SOCIETY OF CANADA The Society was incorporated in 1890 as The Astronomical and Physical Society of Toronto, assuming its present name in 1903. For many years the Toronto organization existed alone, but now the Society is national in extent, having active Centres in Montreal and Quebec, P.Q.; Ottawa, Toronto, Hamilton, London, and Windsor, Ontario; Winnipeg, Man.; Saskatoon, Sask.; Edmonton, Alta.; Vancouver and Victoria, B.C. As well as nearly 1000 members of these Canadian Centres, there are nearly 400 members not attached to any Centre, mostly resident in other nations, while some 200 additional institutions or persons are on the regular mailing list of our publications. The Society publishes a bi-monthly J o u r n a l and a yearly O b serv er's H a n d bo o k . Single copies of the J o u r n a l are 50 cents, and of the H a n d bo o k , 50 cents. Membership is open to anyone interested in astronomy. Annual dues, $3.00; life membership, $40.00. Publications are sent free to all members or may be subscribed for separately. Applications for membership or publications may be made to the National Secretary, 3 Willcocks St., Toronto. -

Spectroscopy of Variable Stars
Spectroscopy of Variable Stars Steve B. Howell and Travis A. Rector The National Optical Astronomy Observatory 950 N. Cherry Ave. Tucson, AZ 85719 USA Introduction A Note from the Authors The goal of this project is to determine the physical characteristics of variable stars (e.g., temperature, radius and luminosity) by analyzing spectra and photometric observations that span several years. The project was originally developed as a The 2.1-meter telescope and research project for teachers participating in the NOAO TLRBSE program. Coudé Feed spectrograph at Kitt Peak National Observatory in Ari- Please note that it is assumed that the instructor and students are familiar with the zona. The 2.1-meter telescope is concepts of photometry and spectroscopy as it is used in astronomy, as well as inside the white dome. The Coudé stellar classification and stellar evolution. This document is an incomplete source Feed spectrograph is in the right of information on these topics, so further study is encouraged. In particular, the half of the building. It also uses “Stellar Spectroscopy” document will be useful for learning how to analyze the the white tower on the right. spectrum of a star. Prerequisites To be able to do this research project, students should have a basic understanding of the following concepts: • Spectroscopy and photometry in astronomy • Stellar evolution • Stellar classification • Inverse-square law and Stefan’s law The control room for the Coudé Description of the Data Feed spectrograph. The spec- trograph is operated by the two The spectra used in this project were obtained with the Coudé Feed telescopes computers on the left. -

Variable Star Classification and Light Curves Manual
Variable Star Classification and Light Curves An AAVSO course for the Carolyn Hurless Online Institute for Continuing Education in Astronomy (CHOICE) This is copyrighted material meant only for official enrollees in this online course. Do not share this document with others. Please do not quote from it without prior permission from the AAVSO. Table of Contents Course Description and Requirements for Completion Chapter One- 1. Introduction . What are variable stars? . The first known variable stars 2. Variable Star Names . Constellation names . Greek letters (Bayer letters) . GCVS naming scheme . Other naming conventions . Naming variable star types 3. The Main Types of variability Extrinsic . Eclipsing . Rotating . Microlensing Intrinsic . Pulsating . Eruptive . Cataclysmic . X-Ray 4. The Variability Tree Chapter Two- 1. Rotating Variables . The Sun . BY Dra stars . RS CVn stars . Rotating ellipsoidal variables 2. Eclipsing Variables . EA . EB . EW . EP . Roche Lobes 1 Chapter Three- 1. Pulsating Variables . Classical Cepheids . Type II Cepheids . RV Tau stars . Delta Sct stars . RR Lyr stars . Miras . Semi-regular stars 2. Eruptive Variables . Young Stellar Objects . T Tau stars . FUOrs . EXOrs . UXOrs . UV Cet stars . Gamma Cas stars . S Dor stars . R CrB stars Chapter Four- 1. Cataclysmic Variables . Dwarf Novae . Novae . Recurrent Novae . Magnetic CVs . Symbiotic Variables . Supernovae 2. Other Variables . Gamma-Ray Bursters . Active Galactic Nuclei 2 Course Description and Requirements for Completion This course is an overview of the types of variable stars most commonly observed by AAVSO observers. We discuss the physical processes behind what makes each type variable and how this is demonstrated in their light curves. Variable star names and nomenclature are placed in a historical context to aid in understanding today’s classification scheme. -
Introduction to ASTR 565 Stellar Structure and Evolution
Introduction to ASTR 565 Stellar Structure and Evolution Jason Jackiewicz Department of Astronomy New Mexico State University August 22, 2019 Main goal Structure of stars Evolution of stars Applications to observations Overview of course Outline 1 Main goal 2 Structure of stars 3 Evolution of stars 4 Applications to observations 5 Overview of course Introduction to ASTR 565 Jason Jackiewicz Main goal Structure of stars Evolution of stars Applications to observations Overview of course 1 Main goal 2 Structure of stars 3 Evolution of stars 4 Applications to observations 5 Overview of course Introduction to ASTR 565 Jason Jackiewicz Main goal Structure of stars Evolution of stars Applications to observations Overview of course Order in the H-R Diagram!! Introduction to ASTR 565 Jason Jackiewicz Main goal Structure of stars Evolution of stars Applications to observations Overview of course Motivation: Understanding the H-R Diagram Introduction to ASTR 565 Jason Jackiewicz HRD (2) HRD (3) Main goal Structure of stars Evolution of stars Applications to observations Overview of course 1 Main goal 2 Structure of stars 3 Evolution of stars 4 Applications to observations 5 Overview of course Introduction to ASTR 565 Jason Jackiewicz Main goal Structure of stars Evolution of stars Applications to observations Overview of course Basic structure - highly non-linear solution Introduction to ASTR 565 Jason Jackiewicz Main goal Structure of stars Evolution of stars Applications to observations Overview of course Massive-star nuclear burning Introduction