Active Touch Sensing in Pinnipeds
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-
MINNESOTA MUSTELIDS Young
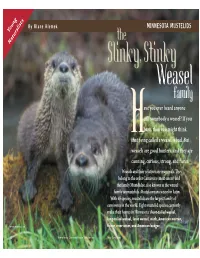
By Blane Klemek MINNESOTA MUSTELIDS Young Naturalists the Slinky,Stinky Weasel family ave you ever heard anyone call somebody a weasel? If you have, then you might think Hthat being called a weasel is bad. But weasels are good hunters, and they are cunning, curious, strong, and fierce. Weasels and their relatives are mammals. They belong to the order Carnivora (meat eaters) and the family Mustelidae, also known as the weasel family or mustelids. Mustela means weasel in Latin. With 65 species, mustelids are the largest family of carnivores in the world. Eight mustelid species currently make their homes in Minnesota: short-tailed weasel, long-tailed weasel, least weasel, mink, American marten, OTTERS BY DANIEL J. COX fisher, river otter, and American badger. Minnesota Conservation Volunteer May–June 2003 n e MARY CLAY, DEMBINSKY t PHOTO ASSOCIATES r mammals a WEASELS flexible m Here are two TOM AND PAT LEESON specialized mustelid feet. b One is for climb- ou can recognize a ing and the other for hort-tailed weasels (Mustela erminea), long- The long-tailed weasel d most mustelids g digging. Can you tell tailed weasels (M. frenata), and least weasels eats the most varied e food of all weasels. It by their tubelike r which is which? (M. nivalis) live throughout Minnesota. In also lives in the widest Ybodies and their short Stheir northern range, including Minnesota, weasels variety of habitats and legs. Some, such as badgers, hunting. Otters and minks turn white in winter. In autumn, white hairs begin climates across North are heavy and chunky. Some, are excellent swimmers that hunt to replace their brown summer coat. -
Conservation of the Wildcat (Felis Silvestris) in Scotland: Review of the Conservation Status and Assessment of Conservation Activities
Conservation of the wildcat (Felis silvestris) in Scotland: Review of the conservation status and assessment of conservation activities Urs Breitenmoser, Tabea Lanz and Christine Breitenmoser-Würsten February 2019 Wildcat in Scotland – Review of Conservation Status and Activities 2 Cover photo: Wildcat (Felis silvestris) male meets domestic cat female, © L. Geslin. In spring 2018, the Scottish Wildcat Conservation Action Plan Steering Group commissioned the IUCN SSC Cat Specialist Group to review the conservation status of the wildcat in Scotland and the implementation of conservation activities so far. The review was done based on the scientific literature and available reports. The designation of the geographical entities in this report, and the representation of the material, do not imply the expression of any opinion whatsoever on the part of the IUCN concerning the legal status of any country, territory, or area, or its authorities, or concerning the delimitation of its frontiers or boundaries. The SWCAP Steering Group contact point is Martin Gaywood ([email protected]). Wildcat in Scotland – Review of Conservation Status and Activities 3 List of Content Abbreviations and Acronyms 4 Summary 5 1. Introduction 7 2. History and present status of the wildcat in Scotland – an overview 2.1. History of the wildcat in Great Britain 8 2.2. Present status of the wildcat in Scotland 10 2.3. Threats 13 2.4. Legal status and listing 16 2.5. Characteristics of the Scottish Wildcat 17 2.6. Phylogenetic and taxonomic characteristics 20 3. Recent conservation initiatives and projects 3.1. Conservation planning and initial projects 24 3.2. Scottish Wildcat Action 28 3.3. -

Evidence from Vibrissal Musculature and Function in the Marsupial Opossum Monodelphis Domestica
3483 The Journal of Experimental Biology 216, 3483-3494 © 2013. Published by The Company of Biologists Ltd doi:10.1242/jeb.087452 RESEARCH ARTICLE The evolution of active vibrissal sensing in mammals: evidence from vibrissal musculature and function in the marsupial opossum Monodelphis domestica Robyn A. Grant1, Sebastian Haidarliu2, Natalie J. Kennerley3 and Tony J. Prescott3,* 1Division of Biology and Conservation Ecology, Manchester Metropolitan University, Manchester M1 5GD, UK, 2Department of Neurobiology, The Weizmann Institute, Rehovot, Israel and 3Department of Psychology, University of Sheffield, Western Bank, Sheffield S10 2TN, UK *Author for correspondence ([email protected]) SUMMARY Facial vibrissae, or whiskers, are found in nearly all extant mammal species and are likely to have been present in early mammalian ancestors. A sub-set of modern mammals, including many rodents, move their long mystacial whiskers back and forth at high speed whilst exploring in a behaviour known as ‘whisking’. It is not known whether the vibrissae of early mammals moved in this way. The grey short-tailed opossum, Monodelphis domestica, is considered a useful species from the perspective of tracing the evolution of modern mammals. Interestingly, these marsupials engage in whisking bouts similar to those seen in rodents. To better assess the likelihood that active vibrissal sensing was present in ancestral mammals, we examined the vibrissal musculature of the opossum using digital miscroscopy to see whether this resembles that of rodents. Although opossums have fewer whiskers than rats, our investigation found that they have a similar vibrissal musculature. In particular, in both rats and opossums, the musculature includes both intrinsic and extrinsic muscles with the intrinsic muscles positioned as slings linking pairs of large vibrissae within rows. -

Download Full Article in PDF Format
A new marine vertebrate assemblage from the Late Neogene Purisima Formation in Central California, part II: Pinnipeds and Cetaceans Robert W. BOESSENECKER Department of Geology, University of Otago, 360 Leith Walk, P.O. Box 56, Dunedin, 9054 (New Zealand) and Department of Earth Sciences, Montana State University 200 Traphagen Hall, Bozeman, MT, 59715 (USA) and University of California Museum of Paleontology 1101 Valley Life Sciences Building, Berkeley, CA, 94720 (USA) [email protected] Boessenecker R. W. 2013. — A new marine vertebrate assemblage from the Late Neogene Purisima Formation in Central California, part II: Pinnipeds and Cetaceans. Geodiversitas 35 (4): 815-940. http://dx.doi.org/g2013n4a5 ABSTRACT e newly discovered Upper Miocene to Upper Pliocene San Gregorio assem- blage of the Purisima Formation in Central California has yielded a diverse collection of 34 marine vertebrate taxa, including eight sharks, two bony fish, three marine birds (described in a previous study), and 21 marine mammals. Pinnipeds include the walrus Dusignathus sp., cf. D. seftoni, the fur seal Cal- lorhinus sp., cf. C. gilmorei, and indeterminate otariid bones. Baleen whales include dwarf mysticetes (Herpetocetus bramblei Whitmore & Barnes, 2008, Herpetocetus sp.), two right whales (cf. Eubalaena sp. 1, cf. Eubalaena sp. 2), at least three balaenopterids (“Balaenoptera” cortesi “var.” portisi Sacco, 1890, cf. Balaenoptera, Balaenopteridae gen. et sp. indet.) and a new species of rorqual (Balaenoptera bertae n. sp.) that exhibits a number of derived features that place it within the genus Balaenoptera. is new species of Balaenoptera is relatively small (estimated 61 cm bizygomatic width) and exhibits a comparatively nar- row vertex, an obliquely (but precipitously) sloping frontal adjacent to vertex, anteriorly directed and short zygomatic processes, and squamosal creases. -

List of Marine Mammal Species and Subspecies
List of Marine Mammal Species and Subspecies Introduction The Committee on Taxonomy, chaired by Patricia Rosel, produced the first official Society for Marine Mammalogy list of marine mammal species and subspecies in 2010. Consensus on some issues has not been possible; this is reflected in the footnotes. The list is updated at least annually. The current version was updated in May 2020. This list can be cited as follows: “Committee on Taxonomy. 2019. List of marine mammal species and subspecies. Society for Marine Mammalogy, www.marinemammalscience.org, consulted on [date].” This list includes living and recently extinct (within historical times) species and subspecies. It is meant to reflect prevailing usage and recent revisions published in the peer-reviewed literature. Classification and scientific names follow Rice (1998), with adjustments reflecting more recent literature. Author(s) and year of description of each taxon follow the Latin (scientific) species name; when these are enclosed in parentheses, the taxon was originally described in a different genus. The Committee annually considers and evaluates new, peer-reviewed literature that proposes taxonomic changes. The Committee’s focus is on alpha taxonomy (describing and naming taxa) and beta taxonomy primarily at lower levels of the hierarchy (subspecies, species and genera), although it may evaluate issues at higher levels if deemed necessary. Proposals for new, taxonomically distinct taxa require a formal, peer-reviewed study and should provide robust evidence that some subspecies or species criterion was met. For review of species concepts, see Reeves et al. (2004), Orr and Coyne (2004), de Queiroz (2007), Perrin (2009) and Taylor et al. -

Mammalia, Carnivora) from the Blancan of Florida
THREE NEW PROCYONIDS (MAMMALIA, CARNIVORA) FROM THE BLANCAN OF FLORIDA Laura G. Emmert1,2 and Rachel A. Short1,3 ABSTRACT Fossils of the mammalian family Procyonidae are relatively abundant at many fossil localities in Florida. Analysis of specimens from 16 late Blancan localities from peninsular Florida demonstrate the presence of two species of Procyon and one species of Nasua. Procyon gipsoni sp. nov. is slightly larger than extant Procyon lotor and is distinguished by five dental characters including a lack of a crista between the para- cone and hypocone on the P4, absence of a basin at the lingual intersection of the hypocone and protocone on the P4, and a reduced metaconule on the M1. Procyon megalokolos sp. nov. is significantly larger than extant P. lotor and is characterized primarily by morphology of the postcrania, such as an expanded and posteriorly rotated humeral medial epicondyle, more prominent tibial tuberosity, and more pronounced radioulnar notch. Other than larger size, the dentition of P. megalokolos falls within the range of variation observed in extant P. lotor, suggesting that it may be an early member of the P. lotor lineage. Nasua mast- odonta sp. nov. has a unique accessory cusp on the m1 as well as multiple morphological differences in the dentition and postcrania, such as close appression of the trigonid of the m1 and a less expanded medial epicondyle of the humerus. We also synonymize Procyon rexroadensis, formerly the only known Blancan Procyon species in North America, with P. lotor due to a lack of distinct dental morphological features observed in specimens from its type locality in Kansas. -

56. Otariidae and Phocidae
FAUNA of AUSTRALIA 56. OTARIIDAE AND PHOCIDAE JUDITH E. KING 1 Australian Sea-lion–Neophoca cinerea [G. Ross] Southern Elephant Seal–Mirounga leonina [G. Ross] Ross Seal, with pup–Ommatophoca rossii [J. Libke] Australian Sea-lion–Neophoca cinerea [G. Ross] Weddell Seal–Leptonychotes weddellii [P. Shaughnessy] New Zealand Fur-seal–Arctocephalus forsteri [G. Ross] Crab-eater Seal–Lobodon carcinophagus [P. Shaughnessy] 56. OTARIIDAE AND PHOCIDAE DEFINITION AND GENERAL DESCRIPTION Pinnipeds are aquatic carnivores. They differ from other mammals in their streamlined shape, reduction of pinnae and adaptation of both fore and hind feet to form flippers. In the skull, the orbits are enlarged, the lacrimal bones are absent or indistinct and there are never more than three upper and two lower incisors. The cheek teeth are nearly homodont and some conditions of the ear that are very distinctive (Repenning 1972). Both superfamilies of pinnipeds, Phocoidea and Otarioidea, are represented in Australian waters by a number of species (Table 56.1). The various superfamilies and families may be distinguished by important and/or easily observed characters (Table 56.2). King (1983b) provided more detailed lists and references. These and other differences between the above two groups are not regarded as being of great significance, especially as an undoubted fur seal (Australian Fur-seal Arctocephalus pusillus) is as big as some of the sea lions and has some characters of the skull, teeth and behaviour which are rather more like sea lions (Repenning, Peterson & Hubbs 1971; Warneke & Shaughnessy 1985). The Phocoidea includes the single Family Phocidae – the ‘true seals’, distinguished from the Otariidae by the absence of a pinna and by the position of the hind flippers (Fig. -

Felis Silvestris, Wild Cat
The IUCN Red List of Threatened Species™ ISSN 2307-8235 (online) IUCN 2008: T60354712A50652361 Felis silvestris, Wild Cat Assessment by: Yamaguchi, N., Kitchener, A., Driscoll, C. & Nussberger, B. View on www.iucnredlist.org Citation: Yamaguchi, N., Kitchener, A., Driscoll, C. & Nussberger, B. 2015. Felis silvestris. The IUCN Red List of Threatened Species 2015: e.T60354712A50652361. http://dx.doi.org/10.2305/IUCN.UK.2015-2.RLTS.T60354712A50652361.en Copyright: © 2015 International Union for Conservation of Nature and Natural Resources Reproduction of this publication for educational or other non-commercial purposes is authorized without prior written permission from the copyright holder provided the source is fully acknowledged. Reproduction of this publication for resale, reposting or other commercial purposes is prohibited without prior written permission from the copyright holder. For further details see Terms of Use. The IUCN Red List of Threatened Species™ is produced and managed by the IUCN Global Species Programme, the IUCN Species Survival Commission (SSC) and The IUCN Red List Partnership. The IUCN Red List Partners are: BirdLife International; Botanic Gardens Conservation International; Conservation International; Microsoft; NatureServe; Royal Botanic Gardens, Kew; Sapienza University of Rome; Texas A&M University; Wildscreen; and Zoological Society of London. If you see any errors or have any questions or suggestions on what is shown in this document, please provide us with feedback so that we can correct or extend the information -

Brucella Antibody Seroprevalence in Antarctic Seals (Arctocephalus Gazella, Leptonychotes Weddellii and Mirounga Leonina)
Vol. 105: 175–181, 2013 DISEASES OF AQUATIC ORGANISMS Published September 3 doi: 10.3354/dao02633 Dis Aquat Org Brucella antibody seroprevalence in Antarctic seals (Arctocephalus gazella, Leptonychotes weddellii and Mirounga leonina) Silje-Kristin Jensen1,2,*, Ingebjørg Helena Nymo1, Jaume Forcada3, Ailsa Hall2, Jacques Godfroid1 1Section for Arctic Veterinary Medicine, Norwegian School of Veterinary Science, Stakkevollveien 23, 9010 Tromsø, Norway; member of the Fram Centre - High North Research Centre for Climate and the Environment, 9296 Tromsø, Norway 2Sea Mammal Research Unit, Scottish Oceans Institute, University of St. Andrews, St. Andrews KY16 8LB, UK 3British Antarctic Survey, Natural Environment Research Council, High Cross, Madingley Road, Cambridge CB3 0ET, UK ABSTRACT: Brucellosis is a worldwide infectious zoonotic disease caused by Gram-negative bac- teria of the genus Brucella, and Brucella infections in marine mammals were first reported in 1994. A serosurvey investigating the presence of anti-Brucella antibodies in 3 Antarctic pinniped spe- cies was undertaken with a protein A/G indirect enzyme-linked immunosorbent assay (iELISA) and the Rose Bengal test (RBT). Serum samples from 33 Weddell seals Leptonychotes weddelli were analysed, and antibodies were detected in 8 individuals (24.2%) with the iELISA and in 21 (65.6%) with the RBT. We tested 48 southern elephant seal Mirounga leonina sera and detected antibodies in 2 animals (4.7%) with both the iELISA and the RBT. None of the 21 Antarctic fur seals Arctocephalus gazella was found positive. This is the first report of anti-Brucella antibodies in southern elephant seals. The potential impact of Brucella infection in pinnipeds in Antarctica is not known, but Brucella spp. -

Mammalia, Felidae, Canidae, and Mustelidae) from the Earliest Hemphillian Screw Bean Local Fauna, Big Bend National Park, Brewster County, Texas
Chapter 9 Carnivora (Mammalia, Felidae, Canidae, and Mustelidae) From the Earliest Hemphillian Screw Bean Local Fauna, Big Bend National Park, Brewster County, Texas MARGARET SKEELS STEVENS1 AND JAMES BOWIE STEVENS2 ABSTRACT The Screw Bean Local Fauna is the earliest Hemphillian fauna of the southwestern United States. The fossil remains occur in all parts of the informal Banta Shut-in formation, nowhere very fossiliferous. The formation is informally subdivided on the basis of stepwise ®ning and slowing deposition into Lower (least fossiliferous), Middle, and Red clay members, succeeded by the valley-®lling, Bench member (most fossiliferous). Identi®ed Carnivora include: cf. Pseudaelurus sp. and cf. Nimravides catocopis, medium and large extinct cats; Epicyon haydeni, large borophagine dog; Vulpes sp., small fox; cf. Eucyon sp., extinct primitive canine; Buisnictis chisoensis, n. sp., extinct skunk; and Martes sp., marten. B. chisoensis may be allied with Spilogale on the basis of mastoid specialization. Some of the Screw Bean taxa are late survivors of the Clarendonian Chronofauna, which extended through most or all of the early Hemphillian. The early early Hemphillian, late Miocene age attributed to the fauna is based on the Screw Bean assemblage postdating or- eodont and predating North American edentate occurrences, on lack of de®ning Hemphillian taxa, and on stage of evolution. INTRODUCTION southwestern North America, and ®ll a pa- leobiogeographic gap. In Trans-Pecos Texas NAMING AND IMPORTANCE OF THE SCREW and adjacent Chihuahua and Coahuila, Mex- BEAN LOCAL FAUNA: The name ``Screw Bean ico, they provide an age determination for Local Fauna,'' Banta Shut-in formation, postvolcanic (,18±20 Ma; Henry et al., Trans-Pecos Texas (®g. -

Marine Ecology Progress Series 585:229
Vol. 585: 229–242, 2017 MARINE ECOLOGY PROGRESS SERIES Published December 27 https://doi.org/10.3354/meps12411 Mar Ecol Prog Ser Temporal consistency of individual trophic specialization in southern elephant seals Mirounga leonina D. Rita1,*, M. Drago1,2, F. Galimberti3, L. Cardona1 1Biodiversity Research Institute (IRBio) and Department of Evolutionary Biology, Ecology and Environmental Science, Faculty of Biology, University of Barcelona, Avinguda Diagonal 643, 08028 Barcelona, Spain 2Departamento de Ecología & Evolución, Centro Universitario Regional Este (CURE), Universidad de la República, Tacuarembó s/n, 20000 Maldonado, Uruguay 3Elephant Seal Research Group, Sea Lion Island, Falkland Islands ABSTRACT: Individual specialization can be an advantageous strategy that increases predation success and diminishes intra-population competition. However, trophic specialization can be a handicap in changing environments if the individuals are unable to use different prey or feeding grounds in response to change. Southern elephant seals Mirounga leonina allow us to explore this trade-off as they migrate, returning to haul out on land, for 2 extended periods, to breed and to moult. They fast during both periods, but the energetic cost is higher during the breeding season, leading to a poorer body condition after the breeding fast than after the moulting fast. We ana- lysed the carbon (δ13C) and nitrogen (δ15N) isotopic composition of skin and fur samples from Falk- land Islands elephant seals. The isotopic values provided information about the foraging strategy of the seals during the pre-breeding season and pre-moulting season, respectively. We assessed individual specialization as the variation between periods of an individual with respect to the variability of the whole population. -
Biodiversity: the UK Overseas Territories. Peterborough, Joint Nature Conservation Committee
Biodiversity: the UK Overseas Territories Compiled by S. Oldfield Edited by D. Procter and L.V. Fleming ISBN: 1 86107 502 2 © Copyright Joint Nature Conservation Committee 1999 Illustrations and layout by Barry Larking Cover design Tracey Weeks Printed by CLE Citation. Procter, D., & Fleming, L.V., eds. 1999. Biodiversity: the UK Overseas Territories. Peterborough, Joint Nature Conservation Committee. Disclaimer: reference to legislation and convention texts in this document are correct to the best of our knowledge but must not be taken to infer definitive legal obligation. Cover photographs Front cover: Top right: Southern rockhopper penguin Eudyptes chrysocome chrysocome (Richard White/JNCC). The world’s largest concentrations of southern rockhopper penguin are found on the Falkland Islands. Centre left: Down Rope, Pitcairn Island, South Pacific (Deborah Procter/JNCC). The introduced rat population of Pitcairn Island has successfully been eradicated in a programme funded by the UK Government. Centre right: Male Anegada rock iguana Cyclura pinguis (Glen Gerber/FFI). The Anegada rock iguana has been the subject of a successful breeding and re-introduction programme funded by FCO and FFI in collaboration with the National Parks Trust of the British Virgin Islands. Back cover: Black-browed albatross Diomedea melanophris (Richard White/JNCC). Of the global breeding population of black-browed albatross, 80 % is found on the Falkland Islands and 10% on South Georgia. Background image on front and back cover: Shoal of fish (Charles Sheppard/Warwick