Logical Link Control
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Solutions to Chapter 2
CS413 Computer Networks ASN 4 Solutions Solutions to Assignment #4 3. What difference does it make to the network layer if the underlying data link layer provides a connection-oriented service versus a connectionless service? [4 marks] Solution: If the data link layer provides a connection-oriented service to the network layer, then the network layer must precede all transfer of information with a connection setup procedure (2). If the connection-oriented service includes assurances that frames of information are transferred correctly and in sequence by the data link layer, the network layer can then assume that the packets it sends to its neighbor traverse an error-free pipe. On the other hand, if the data link layer is connectionless, then each frame is sent independently through the data link, probably in unconfirmed manner (without acknowledgments or retransmissions). In this case the network layer cannot make assumptions about the sequencing or correctness of the packets it exchanges with its neighbors (2). The Ethernet local area network provides an example of connectionless transfer of data link frames. The transfer of frames using "Type 2" service in Logical Link Control (discussed in Chapter 6) provides a connection-oriented data link control example. 4. Suppose transmission channels become virtually error-free. Is the data link layer still needed? [2 marks – 1 for the answer and 1 for explanation] Solution: The data link layer is still needed(1) for framing the data and for flow control over the transmission channel. In a multiple access medium such as a LAN, the data link layer is required to coordinate access to the shared medium among the multiple users (1). -

Logical Link Control and Channel Scheduling for Multichannel Underwater Sensor Networks
ICST Transactions on Mobile Communications and Applications Research Article Logical Link Control and Channel Scheduling for Multichannel Underwater Sensor Networks Jun Li ∗, Mylene` Toulgoat, Yifeng Zhou, and Louise Lamont Communications Research Centre Canada, 3701 Carling Avenue, Ottawa, ON. K2H 8S2 Canada Abstract With recent developments in terrestrial wireless networks and advances in acoustic communications, multichannel technologies have been proposed to be used in underwater networks to increase data transmission rate over bandwidth-limited underwater channels. Due to high bit error rates in underwater networks, an efficient error control technique is critical in the logical link control (LLC) sublayer to establish reliable data communications over intrinsically unreliable underwater channels. In this paper, we propose a novel protocol stack architecture featuring cross-layer design of LLC sublayer and more efficient packet- to-channel scheduling for multichannel underwater sensor networks. In the proposed stack architecture, a selective-repeat automatic repeat request (SR-ARQ) based error control protocol is combined with a dynamic channel scheduling policy at the LLC sublayer. The dynamic channel scheduling policy uses the channel state information provided via cross-layer design. It is demonstrated that the proposed protocol stack architecture leads to more efficient transmission of multiple packets over parallel channels. Simulation studies are conducted to evaluate the packet delay performance of the proposed cross-layer protocol stack architecture with two different scheduling policies: the proposed dynamic channel scheduling and a static channel scheduling. Simulation results show that the dynamic channel scheduling used in the cross-layer protocol stack outperforms the static channel scheduling. It is observed that, when the dynamic channel scheduling is used, the number of parallel channels has only an insignificant impact on the average packet delay. -

Physical Layer Overview
ELEC3030 (EL336) Computer Networks S Chen Physical Layer Overview • Physical layer forms the basis of all networks, and we will first revisit some of fundamental limits imposed on communication media by nature Recall a medium or physical channel has finite Spectrum bandwidth and is noisy, and this imposes a limit Channel bandwidth: on information rate over the channel → This H Hz is a fundamental consideration when designing f network speed or data rate 0 H Type of medium determines network technology → compare wireless network with optic network • Transmission media can be guided or unguided, and we will have a brief review of a variety of transmission media • Communication networks can be classified as switched and broadcast networks, and we will discuss a few examples • The term “physical layer protocol” as such is not used, but we will attempt to draw some common design considerations and exams a few “physical layer standards” 13 ELEC3030 (EL336) Computer Networks S Chen Rate Limit • A medium or channel is defined by its bandwidth H (Hz) and noise level which is specified by the signal-to-noise ratio S/N (dB) • Capability of a medium is determined by a physical quantity called channel capacity, defined as C = H log2(1 + S/N) bps • Network speed is usually given as data or information rate in bps, and every one wants a higher speed network: for example, with a 10 Mbps network, you may ask yourself why not 10 Gbps? • Given data rate fd (bps), the actual transmission or baud rate fb (Hz) over the medium is often different to fd • This is for -
Telematics Chapter 3: Physical Layer
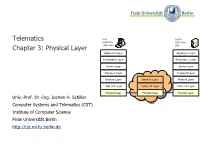
Telematics User Server watching with video Chapter 3: Physical Layer video clip clips Application Layer Application Layer Presentation Layer Presentation Layer Session Layer Session Layer Transport Layer Transport Layer Network Layer Network Layer Network Layer Data Link Layer Data Link Layer Data Link Layer Physical Layer Physical Layer Physical Layer Univ.-Prof. Dr.-Ing. Jochen H. Schiller Computer Systems and Telematics (CST) Institute of Computer Science Freie Universität Berlin http://cst.mi.fu-berlin.de Contents ● Design Issues ● Theoretical Basis for Data Communication ● Analog Data and Digital Signals ● Data Encoding ● Transmission Media ● Guided Transmission Media ● Wireless Transmission (see Mobile Communications) ● The Last Mile Problem ● Multiplexing ● Integrated Services Digital Network (ISDN) ● Digital Subscriber Line (DSL) ● Mobile Telephone System Univ.-Prof. Dr.-Ing. Jochen H. Schiller ▪ cst.mi.fu-berlin.de ▪ Telematics ▪ Chapter 3: Physical Layer 3.2 Design Issues Univ.-Prof. Dr.-Ing. Jochen H. Schiller ▪ cst.mi.fu-berlin.de ▪ Telematics ▪ Chapter 3: Physical Layer 3.3 Design Issues ● Connection parameters ● mechanical OSI Reference Model ● electric and electronic Application Layer ● functional and procedural Presentation Layer ● More detailed ● Physical transmission medium (copper cable, Session Layer optical fiber, radio, ...) ● Pin usage in network connectors Transport Layer ● Representation of raw bits (code, voltage,…) Network Layer ● Data rate ● Control of bit flow: Data Link Layer ● serial or parallel transmission of bits Physical Layer ● synchronous or asynchronous transmission ● simplex, half-duplex, or full-duplex transmission mode Univ.-Prof. Dr.-Ing. Jochen H. Schiller ▪ cst.mi.fu-berlin.de ▪ Telematics ▪ Chapter 3: Physical Layer 3.4 Design Issues Transmitter Receiver Source Transmission System Destination NIC NIC Input Abcdef djasdja dak jd ashda kshd akjsd asdkjhasjd as kdjh askjda Univ.-Prof. -
Data Link Layer
Data link layer Goals: ❒ Principles behind data link layer services ❍ Error detection, correction ❍ Sharing a broadcast channel: Multiple access ❍ Link layer addressing ❍ Reliable data transfer, flow control: Done! ❒ Example link layer technology: Ethernet Link layer services Framing and link access ❍ Encapsulate datagram: Frame adds header, trailer ❍ Channel access – if shared medium ❍ Frame headers use ‘physical addresses’ = “MAC” to identify source and destination • Different from IP address! Reliable delivery (between adjacent nodes) ❍ Seldom used on low bit error links (fiber optic, co-axial cable and some twisted pairs) ❍ Sometimes used on high error rate links (e.g., wireless links) Link layer services (2.) Flow Control ❍ Pacing between sending and receiving nodes Error Detection ❍ Errors are caused by signal attenuation and noise. ❍ Receiver detects presence of errors signals sender for retrans. or drops frame Error Correction ❍ Receiver identifies and corrects bit error(s) without resorting to retransmission Half-duplex and full-duplex ❍ With half duplex, nodes at both ends of link can transmit, but not at same time Multiple access links / protocols Two types of “links”: ❒ Point-to-point ❍ PPP for dial-up access ❍ Point-to-point link between Ethernet switch and host ❒ Broadcast (shared wire or medium) ❍ Traditional Ethernet ❍ Upstream HFC ❍ 802.11 wireless LAN MAC protocols: Three broad classes ❒ Channel Partitioning ❍ Divide channel into smaller “pieces” (time slots, frequency) ❍ Allocate piece to node for exclusive use ❒ Random -

OSI Data Link Layer
OSI Data Link Layer Network Fundamentals – Chapter 7 © 2007 Cisco Systems, Inc. All rights reserved. Cisco Public 1 Objectives Explain the role of Data Link layer protocols in data transmission. Describe how the Data Link layer prepares data for transmission on network media. Describe the different types of media access control methods. Identify several common logical network topologies and describe how the logical topology determines the media access control method for that network. Explain the purpose of encapsulating packets into frames to facilitate media access. Describe the Layer 2 frame structure and identify generic fields. Explain the role of key frame header and trailer fields including addressing, QoS, type of protocol and Frame Check Sequence. © 2007 Cisco Systems, Inc. All rights reserved. Cisco Public 2 Data Link Layer – Accessing the Media Describe the service the Data Link Layer provides as it prepares communication for transmission on specific media © 2007 Cisco Systems, Inc. All rights reserved. Cisco Public 3 Data Link Layer – Accessing the Media Describe why Data Link layer protocols are required to control media access © 2007 Cisco Systems, Inc. All rights reserved. Cisco Public 4 Data Link Layer – Accessing the Media Describe the role of framing in preparing a packet for transmission on a given media © 2007 Cisco Systems, Inc. All rights reserved. Cisco Public 5 Data Link Layer – Accessing the Media Describe the role the Data Link layer plays in linking the software and hardware layers © 2007 Cisco Systems, Inc. All rights reserved. Cisco Public 6 Data Link Layer – Accessing the Media Identify several sources for the protocols and standards used by the Data Link layer © 2007 Cisco Systems, Inc. -
Medium Access Control Layer
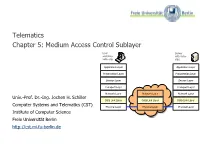
Telematics Chapter 5: Medium Access Control Sublayer User Server watching with video Beispielbildvideo clip clips Application Layer Application Layer Presentation Layer Presentation Layer Session Layer Session Layer Transport Layer Transport Layer Network Layer Network Layer Network Layer Univ.-Prof. Dr.-Ing. Jochen H. Schiller Data Link Layer Data Link Layer Data Link Layer Computer Systems and Telematics (CST) Physical Layer Physical Layer Physical Layer Institute of Computer Science Freie Universität Berlin http://cst.mi.fu-berlin.de Contents ● Design Issues ● Metropolitan Area Networks ● Network Topologies (MAN) ● The Channel Allocation Problem ● Wide Area Networks (WAN) ● Multiple Access Protocols ● Frame Relay (historical) ● Ethernet ● ATM ● IEEE 802.2 – Logical Link Control ● SDH ● Token Bus (historical) ● Network Infrastructure ● Token Ring (historical) ● Virtual LANs ● Fiber Distributed Data Interface ● Structured Cabling Univ.-Prof. Dr.-Ing. Jochen H. Schiller ▪ cst.mi.fu-berlin.de ▪ Telematics ▪ Chapter 5: Medium Access Control Sublayer 5.2 Design Issues Univ.-Prof. Dr.-Ing. Jochen H. Schiller ▪ cst.mi.fu-berlin.de ▪ Telematics ▪ Chapter 5: Medium Access Control Sublayer 5.3 Design Issues ● Two kinds of connections in networks ● Point-to-point connections OSI Reference Model ● Broadcast (Multi-access channel, Application Layer Random access channel) Presentation Layer ● In a network with broadcast Session Layer connections ● Who gets the channel? Transport Layer Network Layer ● Protocols used to determine who gets next access to the channel Data Link Layer ● Medium Access Control (MAC) sublayer Physical Layer Univ.-Prof. Dr.-Ing. Jochen H. Schiller ▪ cst.mi.fu-berlin.de ▪ Telematics ▪ Chapter 5: Medium Access Control Sublayer 5.4 Network Types for the Local Range ● LLC layer: uniform interface and same frame format to upper layers ● MAC layer: defines medium access .. -

Physical Layer Compliance Testing for 1000BASE-T Ethernet
Physical Layer Compliance Testing for 1000BASE-T Ethernet –– APPLICATION NOTE Physical Layer Compliance Testing for 1000BASE-T Ethernet APPLICATION NOTE Engineers designing or validating the 1000BASE-T Ethernet 1000BASE-T Physical Layer physical layer on their products need to perform a wide range Compliance Standards of tests, quickly, reliably and efficiently. This application note describes the tests that ensure validation, the challenges To ensure reliable information transmission over a network, faced while testing multi-level signals, and how oscilloscope- industry standards specify requirements for the network’s resident test software enables significant efficiency physical layer. The IEEE 802.3 standard defines an array of improvements with its wide range of tests, including return compliance tests for 1000BASE-T physical layer. These tests loss, fast validation cycles, and high reliability. are performed by placing the device under test in test modes specified in the standard. The Basics of 1000BASE-T Testing While it is recommended to perform as many tests as Popularly known as Gigabit Ethernet, 1000BASE-T has been possible, the following core tests are critical for compliance: experiencing rapid growth. With only minimal changes to IEEE 802.3 Test Mode Test the legacy cable structure, it offers 100 times faster data Reference rates than 10BASE-T Ethernet signals. Gigabit Ethernet, in Peak 40.6.1.2.1 combination with Fast Ethernet and switched Ethernet, offers Test Mode-1 Droof 40.6.1.2.2 Template 40.6.1.2.3 a cost-effective alternative to slow networks. Test Mode-2 Master Jitter 40.6.1.2.5 Test Mode-3 Slave Jitter 1000BASE-T uses four signal pairs for full-duplex Distortion 40.6.1.2.4 transmission and reception over CAT-5 balanced cabling. -

GS970M Datasheet
Switches | Product Information CentreCOM® GS970M Series Managed Gigabit Ethernet Switches The Allied Telesis CentreCOM GS970M Series of Layer 3 Gigabit switches offer an impressive set of features in a compact design, making them ideal for applications at the network edge. STP root guard ۼۼ Overview Management (UniDirectional Link Detection (UDLD ۼۼ Allied Telesis Autonomous Management ۼۼ Allied Telesis CentreCOM GS970M Series switches provide an excellent Framework™ (AMF) enables powerful centralized management and zerotouch device installation and Security Features access solution for today’s networks, recovery Access Control Lists (ACLs) based on Layer 2, 3 ۼۼ supporting Gigabit to the desktop for Console management port on the front panel for and 4 headers ۼۼ maximum performance. The Power ease of access Configurable auth-fail and guest VLANs ۼۼ Eco-friendly mode allows ports and LEDs to be ۼۼ over Ethernet Plus (PoE+) models Authentication, Authorization, and Accounting ۼۼ provide an ideal solution for connecting disabled to save power (AAA) Industry-standard CLI with context-sensitive help ۼ and remotely powering wireless access ۼ ۼ Bootloader can be password protected for device ۼ ,points, IP video surveillance cameras Powerful CLI scripting engine security ۼۼ ۼ and IP phones. The GS970M models BPDU protection ۼۼ -Comprehensive SNMP MIB support for standards ۼ feature 8, 16 or 24 Gigabit ports, based device management ۼ DHCP snooping, IP source guard and Dynamic ARP ۼ and 2 or 4 SFP uplinks, for secure (Built-in text editor Inspection -

Communications Programming Concepts
AIX Version 7.1 Communications Programming Concepts IBM Note Before using this information and the product it supports, read the information in “Notices” on page 323 . This edition applies to AIX Version 7.1 and to all subsequent releases and modifications until otherwise indicated in new editions. © Copyright International Business Machines Corporation 2010, 2014. US Government Users Restricted Rights – Use, duplication or disclosure restricted by GSA ADP Schedule Contract with IBM Corp. Contents About this document............................................................................................vii How to use this document..........................................................................................................................vii Highlighting.................................................................................................................................................vii Case-sensitivity in AIX................................................................................................................................vii ISO 9000.....................................................................................................................................................vii Communication Programming Concepts................................................................. 1 Data Link Control..........................................................................................................................................1 Generic Data Link Control Environment Overview............................................................................... -

Networking Fundamentals
SMB University: Selling Cisco SMB Foundation Solutions Networking Fundamentals © 2006 Cisco Systems, Inc. All rights reserved. SMBUF-1 Objectives • Describe the function and operation of a hub, a switch and a router • Describe the function and operation of a firewall and a gateway • Describe the function and operation of Layer 2 switching, Layer 3 switching, and routing • Identify the layers of the OSI model • Describe the functionality of LAN, MAN, and WAN networks • Identify the possible media types for LAN and WAN connections © 2006 Cisco Systems, Inc. All rights reserved. SMBUF-2 What is a Network? • A network refers to two or more connected computers that can share resources such as data, a printer, an Internet connection, applications, or a combination of these resources. © 2006 Cisco Systems, Inc. All rights reserved. SMBUF-3 Types of Networks Local Area Network (LAN) Metropolitan Area Network (MAN) Wide Area Network (WAN) © 2006 Cisco Systems, Inc. All rights reserved. SMBUF-4 WAN Technologies Leased Line Synchronous serial Circuit-switched TELEPHONE COMPANY Asynchronous serial. ISDN Layer 1 © 2006 Cisco Systems, Inc. All rights reserved. SMBUF-5 WAN Technologies (Cont.) Frame-Relay Synchronous serial SERVICE PROVIDER Broadband Access SERVICE PROVIDER Cable, DSL, Wireless WAN © 2006 Cisco Systems, Inc. All rights reserved. SMBUF-6 Network Topologies: Bus Topology SEGMENT Terminator Terminator © 2006 Cisco Systems, Inc. All rights reserved. SMBUF-7 Network Topologies: Star Topology Hub © 2006 Cisco Systems, Inc. All rights reserved. SMBUF-8 Network Topologies: Extended Star Topology © 2006 Cisco Systems, Inc. All rights reserved. SMBUF-9 The OSI Model— Why a Layered Network Model? • Reduces complexity Application 7 • Standardizes interfaces Presentation • 6 Facilitates modular engineering • Ensures interoperable technology Session 5 • Accelerates evolution Transport • 4 Simplifies teaching and learning Network 3 Data Link 2 Physical 1 © 2006 Cisco Systems, Inc. -

Tutorial on Network Communications and Security
Lecture Notes Introduction to Digital Networks and Security Raj Bridgelall, PhD © Raj Bridgelall, PhD (North Dakota State University, College of Business) Page 1/23 Table of Contents PART I – NETWORKING CONCEPTS.....................................................................................4 1 INTRODUCTION..................................................................................................................4 2 DATA COMMUNICATIONS ..............................................................................................4 2.1 THE OSI MODEL ...............................................................................................................4 2.2 NETWORKING DEVICES .....................................................................................................5 2.3 TCP/IP ..............................................................................................................................6 3 MOBILE IP ............................................................................................................................7 3.1 FIREWALLS........................................................................................................................9 3.2 DHCP AND DNS ..............................................................................................................9 3.3 IPV6 ................................................................................................................................10 PART II – CRYPTOGRAPHY AND NETWORK SECURITY .............................................12