What Is Signal K?
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

ECE/TRADE/C/CEFACT/2021/20 Economic and Social Council Distr.: General 29 January 2021
United Nations ECE/TRADE/C/CEFACT/2021/20 Economic and Social Council Distr.: General 29 January 2021 Original: English Economic Commission for Europe Executive Committee Centre for Trade Facilitation and Electronic Business Twenty-seventh session Geneva, 19-20 April 2021 Item 9 of the provisional agenda Advisory Group on the United Nations Code for Trade and Transport Locations Report of the United Nations Code for Trade and Transport Location Advisory Group at its Fourth Annual Meeting Submitted by the secretariat Summary The United Nations Code for Trade and Transport Location (UN/LOCODE) Advisory Group held its fourth annual meeting on 27 November 2020. The secretariat prepared a conference report detailing activities undertaken by the Group and decisions made at the meeting. The participants reviewed and agreed to this report. The report provides a summary of the major activities conducted by the Group, the developments and the decisions related to UN/LOCODE, such as supporting the use of UN/LOCODE to identify the Agreement on Port State Measures (PSMA) designated ports by the Food and Agriculture Organization (FAO) to combat Illegal, Unreported and Unregulated (IUU) fishing; the publication of the revised United Nations Economic Commission for Europe (UNECE) Recommendation No. 16; the UN/LOCODE maintenance and the UN/LOCODE Re-engineering project. Document ECE/TRADE/C/CEFACT/2021/20 is submitted by the secretariat to the twenty- seventh UN/CEFACT Plenary for endorsement. ECE/TRADE/C/CEFACT/2021/20 I. Introduction and attendance 1. The UN/LOCODE Advisory Group held its fourth annual meeting on 27 November 2020. Because of the global COVID-19 pandemic, the face-to-face meeting could not be held as usual and the meeting was thus organized virtually. -

Package 'Passport'
Package ‘passport’ November 7, 2020 Type Package Title Travel Smoothly Between Country Name and Code Formats Version 0.3.0 Description Smooths the process of working with country names and codes via powerful parsing, standardization, and conversion utilities arranged in a simple, consistent API. Country name formats include multiple sources including the Unicode Common Locale Data Repository (CLDR, <http://cldr.unicode.org/>) common-sense standardized names in hundreds of languages. Depends R (>= 3.1.0) Imports stats, utils Suggests covr, dplyr, DT, gapminder, ggplot2, jsonlite, knitr, mockr, rmarkdown, testthat, tidyr License GPL-3 | file LICENSE URL https://github.com/alistaire47/passport, https://alistaire47.github.io/passport/ BugReports https://github.com/alistaire47/passport/issues Encoding UTF-8 LazyData true RoxygenNote 7.1.1 VignetteBuilder knitr NeedsCompilation no Author Edward Visel [aut, cre] (<https://orcid.org/0000-0002-2811-6254>) Maintainer Edward Visel <[email protected]> Repository CRAN Date/Publication 2020-11-07 07:30:03 UTC 1 2 as_country_code R topics documented: as_country_code . .2 as_country_name . .3 codes . .5 country_format . .6 nato .............................................7 order_countries . .8 parse_country . 10 Index 12 as_country_code Convert standardized country names to country codes Description as_country_code converts a vector of standardized country names or codes to country codes Usage as_country_code(x, from, to = "iso2c", factor = is.factor(x)) Arguments x A character, factor, or numeric vector of country names or codes from Format from which to convert. See Details for more options. to Code format to which to convert. Defaults to "iso2c"; see codes for more options. factor If TRUE, returns factor instead of character vector. Details as_country_code takes a character, factor, or numeric vector of country names or codes to translate into the specified code format. -

General Addressing Issues
Universal POST*CODE® DataBase page 1/9 Addressing Knowledge Centre General Addressing Issues 1 Which countries in the world have/do not have a postcode system? Nearly every country has a different addressing system. Most countries have a postcode system which indicates the delivery zone or office. When a letter is sent to a given country, it needs to be addressed correctly and with the postcode in the position required by that country. However, some countries do not have a postcode system or have one but do not use it. Here you can find two lists: a list of countries with a postcode system and a list of countries without a postcode system. Universal DataBase (Aug. 2021) List of countries which require postal codes: Country/territory Country/territory Country/territory Country/territory Country/territory name name name name name A-C C-I I-M M-S S-Z Saint Vincent and the Afghanistan Czech Republic Iraq Monaco Grenadines Åland Islands Denmark Isle of Man Mongolia San Marino Albania Djibouti Israel Montserrat Saudi Arabia Algeria Dominican Republic Italy Montenegro (Rep.) Senegal Andorra Ecuador Japan Morocco Serbia Argentina Egypt Jersey Mozambique Singapore Armenia El Salvador Jordan Myanmar Slovakia Australia Estonia Kazakhstan Namibia Slovenia Austria Eswatini Kenya Nauru South Africa Azerbaijan Ethiopia Kiribati Nepal Spain Bahrain Faroe Islands Korea (Rep.) Netherlands Sri Lanka Bangladesh Finland Kosovo (UNMIK) New Caledonia Sudan Barbados France Kuwait New Zealand Sweden Belarus French Guiana Kyrgyzstan Nicaragua Switzerland Lao (People’s Dem. Svalbard and Jan Belgium French Polynesia Niger Rep.) Mayen Island Federated States of Bermuda Latvia Nigeria Tajikistan Micronesia North Macedonia Bhutan Georgia Lebanon Thailand (Rep.) Timor-Leste (Dem. -

6. Part 6: Reference Standards and Specifications Note: Each Citation Indicates Whether the Cited Work Is Normative Or Informative Within This Standard
Federal Geographic Data Committee FGDC Document Number FGDC-STD-016-2011 United States Thoroughfare, Landmark, and Postal Address Data Standard 6. Part 6: Reference Standards and Specifications Note: Each citation indicates whether the cited work is normative or informative within this standard. All references and URLs were current as of September 4, 2010. 6.1 Standards and Specifications Cited 1. EPSG - European Petroleum Survey Group (now defunct; superseded by Geodetic Subcommittee of the International Association of Oil and Gas Producers (OGP)) - see International Association of Oil and Gas Producers (OGP). 2. International Association of Oil and Gas Producers (OGP) Geodetic Subcommittee. "EPSG Geodetic Parameter Dataset." (currently at version 7.5), augmented by accompanying guidance notes, especially EPSG Guidance Note Number 7, part 1, "Using the EPSG Geodetic Parameter Dataset." Version 5.0, November 2009. Posted at: http://www.epsg.org and at: http://info.ogp.org.uk/geodesy/ (Informative) Cited in: Content (Address Coordinate Reference System ID and Address Coordinate Reference System Authority). 3. International Standards Organization. "ISO 3166-1: Codes for the representation of names of countries and their subdivisions -- Part 1: Country codes.” As posted on the ISO webpage captioned "ISO 3166-1: English country names and code elements." ISO Note: "This list states the country names (official short names in English) in alphabetical order as given in ISO 3166-1 and the corresponding ISO 3166- 1-alpha-2 code elements. This list is updated whenever a change to the official code list in ISO 3166-1 is effected by the ISO 3166/MA. It lists 248 official short names and code elements." Note: ISO 3166-1 is protected by ISO copyright. -

ISO 3166-1 NEWSLETTER VI-2 Date: 2008-03-31
,621HZVOHWWHU9, ISO 3166-1 NEWSLETTER VI-2 Date: 2008-03-31 Name changes for Moldova, Montenegro and other minor corrections ISO 3166-1 Newsletters are issued by the secretariat of the ISO 3166/MA when changes in the code lists of ISO 3166-1 have been decided upon by the ISO 3166/MA. ISO 3166-1 Newsletters are identified by a two-component number, stating the currently valid edition of ISO 3166-1 in Roman numerals (e.g. "V") and a consecutive order number (in Latin numerals) starting with "1" for each new edition of ISO 3166-1. All the changes indicated in this Newsletter refer to changes to be made to ISO 3166-1:2006 as corrected by its Technical Corrigendum 1, ISO 3166-1:2006/Cor 1:2007 (published 2007-07-15). The ISO 3166 Maintenance Agency has agreed to the following change(s) to ISO 3166-1:2006, Codes for the representation of names of countries and their subdivisions — Part 1: Country codes. For all countries affected, a complete new entry is given in this Newsletter. A new entry replaces an old one in its entirety. The changes take effect on the date of publication of this Newsletter. The modified entries are listed from page 2 onwards. For reasons of user-friendliness, changes to be added are presented in red colour and those deleted in blue colour. The table below gives a short overview of the changes made. Changes to Alpha Country name/ Short description of change ISO 3166-1:2006 2-code/ Nom de pays Code alpha 2 Clause 9, p. -
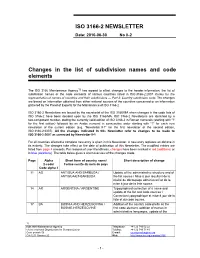
ISO 3166-2 NEWSLETTER Changes in the List of Subdivision Names And
ISO 3166-2 NEWSLETTER Date: 2010-06-30 No II-2 Changes in the list of subdivision names and code elements The ISO 3166 Maintenance Agency1) has agreed to effect changes to the header information, the list of subdivision names or the code elements of various countries listed in ISO 3166-2:2007 Codes for the representation of names of countries and their subdivisions — Part 2: Country subdivision code. The changes are based on information obtained from either national sources of the countries concerned or on information gathered by the Panel of Experts for the Maintenance of ISO 3166-2. ISO 3166-2 Newsletters are issued by the secretariat of the ISO 3166/MA when changes in the code lists of ISO 3166-2 have been decided upon by the ISO 3166/MA. ISO 3166-2 Newsletters are identified by a two-component number, stating the currently valid edition of ISO 3166-2 in Roman numerals (starting with "I" for the first edition) followed by an Arabic numeral in consecutive order starting with "1" for each new newsletter of the current edition (e.g. "Newsletter II-1" for the first newsletter of the second edition, ISO 3166-2:2007). All the changes indicated in this Newsletter refer to changes to be made to ISO 3166-2:2007 as corrected by Newsletter II-1. For all countries affected a complete new entry is given in this Newsletter. A new entry replaces an old one in its entirety. The changes take effect on the date of publication of this Newsletter. The modified entries are listed from page 4 onwards. -

Country Codes in ISO 3166 Page 1 of 10 Country Codes in ISO 3166
Country codes in ISO 3166 Page 1 of 10 Country codes in ISO 3166 Page last modified: 2003-07-25 Data last modified: 2003-07-25 This file lists the codes for each country provided in ISO 3166. There are two tables: existing codes and withdrawn codes (codes can be withdrawn because the country no longer exists, the name has significantly changed, or one or more codes has altered). Each country or territory has three codes: l a two letter code l a three letter code l a three digit code The numeric code identifies a physical territory, and the letters a country name. Thus when Germany reunified, it kept DE/DEU but changed from 280 to 276, while when Southern Rhodesia was renamed Zimbabwe it stayed 716 but changed from RH/RHO to ZW/ZWE. There is also a numeric version of the two letter code not given here, calculated as 1070+30a+b, where a and b are the two letters of the code converted by A=1, B=2, etc. So AA=1101, AB=1102, BA=1131, and ZZ=1876. Changes to ISO 3166 are managed by the ISO 3166 Maintenance Agency (ISO3166/MA). Codes withdrawn from use may not be reused for five years. The two letter codes AA, QM to QZ, XA to XZ, and ZZ, all three letter codes beginning with those pairs, and numeric codes beginning 9, are available for individual use and will not be allocated to countries. The codes OO, OOO, and 000 are designated for use as "escape codes" to indicate that additional codes are being used. -
Global Geocoding SDK V2.1.0 Developer Guide
Location Intelligence Global Geocoding SDK Version 2.1 REST and Java API Developer Guide Table of Contents Appendix C: Result Codes 147 1 - Installation Appendix D: Error Messages 181 Deploying the Global Geocoding SDK Distribution 4 2 - Using the Global Geocoding SDK Introduction to the Global Geocoding APIs 11 3 - REST Web Services Geocode Service 13 Reverse Geocode Service 35 Interactive Geocode Service 45 Key Lookup Service 53 Capabilities Service 58 Dictionaries Service 66 PBLocator REST API 70 4 - Java API Getting Started 78 Configuring 78 Javadocs 80 Chapter : Appendices Appendix A: ISO 3166-1 Country Codes 82 Appendix B: Country-Specific Custom Fields 91 1 - Installation In this section Deploying the Global Geocoding SDK Distribution 4 Installation Deploying the Global Geocoding SDK Distribution Global Geocoding SDK resources must be deployed and configured before they can be used by a geocoding engine. This section explains the necessary commands. The following topics are covered: • Geocoding CLI Utility on page 5 • deploy Command on page 6 • extract Command on page 6 • configure Command on page 7 • setting Command on page 7 Syntax Conventions The following syntax conventions apply when using these CLI commands: Values containing a space must be enclosed with quotes, for example, "Some Value" Path slash marks must be escaped with quotes around it. For example: • A Windows path "C:\path", must be written as "C:\\path" or "C:/path" • A Linux /path must be written as "/path" Global Geocoding SDK 2.1 REST and Java API Developer Guide 4 Installation Geocoding CLI Utility Geocoding CLI utility is bundled with the Global Geocoding SDK (GGS) distribution. -
The UN/EDIFACT PAXLST Implementation Guide
ANNEX III to ADVANCED PASSENGER INFORMATION GUIDELINES WCO/IATA PASSENGER LIST MESSAGE (PAXLST) IMPLEMENTATION GUIDE 28 June 2010 Version 3.0 As this Guide is considered to be a living document, potential developers and users of the PAXLST message are recommended to confirm with the WCO or IATA that they are in possession of the latest version. WCO/IATA PAXLST IMPLEMENTATION GUIDE PASSENGER LIST MESSAGE (PAXLST) IMPLEMENTATION GUIDE TABLE OF CONTENTS 1.0 INTRODUCTION ........................................................................................................... 1 2.0 MESSAGE RELATIONSHIPS...................................................................................... 2 3.0 MESSAGE STRUCTURE FOR THE PAXLST MESSAGE ...................................... 4 3.1 APPLICATION SEGMENTS USED IN THE WCO/IATA PAXLST MESSAGE ..........5 3.2 UNITED NATIONS SERVICE SEGMENTS ...................................................................5 4.0 SEGMENT DETAILS FOR USE IN THE PAXLST MESSAGE .............................. 6 4.1 UNA: SERVICE STRING ADVICE .................................................................................7 4.2 UNB: INTERCHANGE HEADER ....................................................................................8 4.3 UNG: FUNCTIONAL GROUP HEADER .....................................................................10 4.4 UNH: MESSAGE HEADER ...........................................................................................12 4.5 BGM: BEGINNING OF MESSAGE ...............................................................................14 -

Note on Definition of Regions for Statistical Analysis
Committee for the Coordination of Statistical Activities SA/2006/15 Eighth Session Montreal, 4-5 September 2006 30 August 2006 Item 6 of the provisional agenda ================================================================== Note on definition of regions for statistical analysis Prepared by UNSD 1. Background The need to define regional aggregations that would allow a meaningful statistical analysis has long been a concern of the international statistical community. This has become more evident with the new monitoring requirements and with the increasing demand for consistency in the analysis, presentation and reporting across the UN-system and other international agencies, on development issues. A large number of official reports are produced every year by specialized agencies and other UN entities, which present country data according to a regional/geographical classification and often regional and sub-regional aggregates (based on average or other aggregation methods). Regional aggregates are a convenient way to show trends and assess progress over time and differences across the various areas of the world. However, practices vary among the various international agencies and regional groupings and classification of countries are based on different criteria. With the increasing use of statistics and statistical analysis by a large audience, including country delegations, policy makers, the media and the general public, a consistent use of nomenclature for geographical and other country groupings has become a real necessity. This brief -

Product Data Sheet
PRODUCT DATA SHEET Pitney Bowes Spectrum™ Enterprise Location Intelligence Solution ENTERPRISE GEOCODING MODULE WITH INTERNATIONAL COVERAGE THE EXACT INFORMATION YOU NEED WHEN LOCATION REALLY COUNTS Product overview EXPECTED ROI More Precise and More Consistent Data and Analysis More exact geocodes. More No matter where your customers, prospects or company assets are located, domain- precise calculations. Better specific data drives decisions. These decisions can impact virtually every aspect of your decisions. Reduced business risk. business – from market analysis and risk assessment to targeting, portfolio management and network investments. The Enterprise Geocoding Module The Pitney Bowes Spectrum Enterprise Location Intelligence Solution, Enterprise helps you determine the exact Geocoding Module performs address or street, postal code, and city geocoding as well as geographical coordinates for any reverse geocoding for locations in the U.S., Canada, Australia and many other countries. address – even, in some places, This module provides you with actual location coordinates, including latitude and longitude, building entries. You’ll get and, for the U.S., altitude and Accessor’s Parcel Number (APN), which makes it easier for you to analyze data geographically – and make better business decisions. outstanding accuracy, coverage, and depth of insight that can accelerate your success across a Benefit broad range of business initiatives that depend on location data, With Pinpoint Precision, You’ll Know Your Customers Better including: While an address is important for postal delivery, it does not, by itself, give you the answers • Risk Assessment you need to run your business effectively. Especially if your business processes depend on • Market Analysis precise location. • Network Optimization The Enterprise Geocoding Module returns specific geographical coordinates so you can • Effective Targeting assess risk, determine eligibility for service, calculate distance between two points, locate • Portfolio Management prospects, and more. -

ISO 3166-1 Newsletter VI-15 (2013-05-10)
ISO 3166-1 Newsletter VI-15 (2013-05-10) ISO 3166-1 NEWSLETTER VI-15 Date: 2013-05-10 Name change for Papua New Guinea ISO 3166-1 Newsletters are issued by the secretariat of the ISO 3166/MA when changes in the code lists of ISO 3166-1 have been decided upon by the ISO 3166/MA. ISO 3166-1 Newsletters are identified by a two-component number, stating the currently valid edition of ISO 3166-1 in Roman numerals (e.g. "V") and a consecutive order number (in Latin numerals) starting with "1" for each new edition of ISO 3166-1. All the changes indicated in this Newsletter refer to changes to be made to ISO 3166-1:2006 as corrected by its Technical Corrigendum 1, ISO 3166-1:2006/Cor 1:2007 (published 2007-07-15), and Newsletters VI-1 to VI-14. The ISO 3166 Maintenance Agency has agreed to the following change(s) to ISO 3166-1:2006, Codes for the representation of names of countries and their subdivisions — Part 1: Country codes. Changes to Alpha 2-code/ Country name/ Short description of change ISO 3166-1:2006 Code alpha 2 Nom de pays Clause 9, p. 23 PG PAPUA NEW GUINEA/ Change of the full name / Changement Clause 10, p. 38 PAPOUASIE-NOUVELLE- de la forme longue du nom GUINÉE (LA) - 1 - ISO 3166-1 Newsletter VI-15 (2013-05-10) Page 23, Clause 9 Replace the entry for PAPUA NEW GUINEA (PG) (additions in red, deletions in blue): Additional information COUNTRY English short Inde- Adminis- Adminis- Alpha-2 Alpha-3 Numeric NAME English name lower English full name Remarks pen- trative trative code code code short name case dent language(s) language(s)