COUNTING CURVES on RATIONAL SURFACES Contents 1
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Intersection Theory on Moduli Spaces of Curves Via Hyperbolic Geometry
Intersection theory on moduli spaces of curves via hyperbolic geometry Norman Nam Van Do Submitted in total fulfilment of the requirements of the degree of Doctor of Philosophy December 2008 Department of Mathematics and Statistics The University of Melbourne Produced on archival quality paper i Abstract This thesis explores the intersection theory on , the moduli space of genus g stable curves Mg,n with n marked points. Our approach will be via hyperbolic geometry and our starting point will be the recent work of Mirzakhani. One of the landmark results concerning the intersection theory on is Witten’s conjecture. Mg,n Kontsevich was the first to provide a proof, the crux of which is a formula involving combi- natorial objects known as ribbon graphs. A subsequent proof, due to Mirzakhani, arises from considering (L), the moduli space of genus g hyperbolic surfaces with n marked geodesic Mg,n boundaries whose lengths are prescribed by L = (L1, L2,..., Ln). Through the Weil–Petersson symplectic structure on this space, one can associate to it a volume Vg,n(L). Mirzakhani pro- duced a recursion which can be used to effectively calculate these volumes. Furthermore, she proved that V (L) is a polynomial whose coefficients store intersection numbers on . g,n Mg,n Her work allows us to adopt the philosophy that any meaningful statement about the volume V (L) gives a meaningful statement about the intersection theory on , and vice versa. g,n Mg,n Two new results, known as the generalised string and dilaton equations, are introduced in this thesis. These take the form of relations between the Weil–Petersson volumes Vg,n(L) and Vg,n+1(L, Ln+1). -

Combination of Cubic and Quartic Plane Curve
IOSR Journal of Mathematics (IOSR-JM) e-ISSN: 2278-5728,p-ISSN: 2319-765X, Volume 6, Issue 2 (Mar. - Apr. 2013), PP 43-53 www.iosrjournals.org Combination of Cubic and Quartic Plane Curve C.Dayanithi Research Scholar, Cmj University, Megalaya Abstract The set of complex eigenvalues of unistochastic matrices of order three forms a deltoid. A cross-section of the set of unistochastic matrices of order three forms a deltoid. The set of possible traces of unitary matrices belonging to the group SU(3) forms a deltoid. The intersection of two deltoids parametrizes a family of Complex Hadamard matrices of order six. The set of all Simson lines of given triangle, form an envelope in the shape of a deltoid. This is known as the Steiner deltoid or Steiner's hypocycloid after Jakob Steiner who described the shape and symmetry of the curve in 1856. The envelope of the area bisectors of a triangle is a deltoid (in the broader sense defined above) with vertices at the midpoints of the medians. The sides of the deltoid are arcs of hyperbolas that are asymptotic to the triangle's sides. I. Introduction Various combinations of coefficients in the above equation give rise to various important families of curves as listed below. 1. Bicorn curve 2. Klein quartic 3. Bullet-nose curve 4. Lemniscate of Bernoulli 5. Cartesian oval 6. Lemniscate of Gerono 7. Cassini oval 8. Lüroth quartic 9. Deltoid curve 10. Spiric section 11. Hippopede 12. Toric section 13. Kampyle of Eudoxus 14. Trott curve II. Bicorn curve In geometry, the bicorn, also known as a cocked hat curve due to its resemblance to a bicorne, is a rational quartic curve defined by the equation It has two cusps and is symmetric about the y-axis. -

Polynomial Curves and Surfaces
Polynomial Curves and Surfaces Chandrajit Bajaj and Andrew Gillette September 8, 2010 Contents 1 What is an Algebraic Curve or Surface? 2 1.1 Algebraic Curves . .3 1.2 Algebraic Surfaces . .3 2 Singularities and Extreme Points 4 2.1 Singularities and Genus . .4 2.2 Parameterizing with a Pencil of Lines . .6 2.3 Parameterizing with a Pencil of Curves . .7 2.4 Algebraic Space Curves . .8 2.5 Faithful Parameterizations . .9 3 Triangulation and Display 10 4 Polynomial and Power Basis 10 5 Power Series and Puiseux Expansions 11 5.1 Weierstrass Factorization . 11 5.2 Hensel Lifting . 11 6 Derivatives, Tangents, Curvatures 12 6.1 Curvature Computations . 12 6.1.1 Curvature Formulas . 12 6.1.2 Derivation . 13 7 Converting Between Implicit and Parametric Forms 20 7.1 Parameterization of Curves . 21 7.1.1 Parameterizing with lines . 24 7.1.2 Parameterizing with Higher Degree Curves . 26 7.1.3 Parameterization of conic, cubic plane curves . 30 7.2 Parameterization of Algebraic Space Curves . 30 7.3 Automatic Parametrization of Degree 2 Curves and Surfaces . 33 7.3.1 Conics . 34 7.3.2 Rational Fields . 36 7.4 Automatic Parametrization of Degree 3 Curves and Surfaces . 37 7.4.1 Cubics . 38 7.4.2 Cubicoids . 40 7.5 Parameterizations of Real Cubic Surfaces . 42 7.5.1 Real and Rational Points on Cubic Surfaces . 44 7.5.2 Algebraic Reduction . 45 1 7.5.3 Parameterizations without Real Skew Lines . 49 7.5.4 Classification and Straight Lines from Parametric Equations . 52 7.5.5 Parameterization of general algebraic plane curves by A-splines . -

Construction of Rational Surfaces of Degree 12 in Projective Fourspace
Construction of Rational Surfaces of Degree 12 in Projective Fourspace Hirotachi Abo Abstract The aim of this paper is to present two different constructions of smooth rational surfaces in projective fourspace with degree 12 and sectional genus 13. In particular, we establish the existences of five different families of smooth rational surfaces in projective fourspace with the prescribed invariants. 1 Introduction Hartshone conjectured that only finitely many components of the Hilbert scheme of surfaces in P4 contain smooth rational surfaces. In 1989, this conjecture was positively solved by Ellingsrud and Peskine [7]. The exact bound for the degree is, however, still open, and hence the question concerning the exact bound motivates us to find smooth rational surfaces in P4. The goal of this paper is to construct five different families of smooth rational surfaces in P4 with degree 12 and sectional genus 13. The rational surfaces in P4 were previously known up to degree 11. In this paper, we present two different constructions of smooth rational surfaces in P4 with the given invariants. Both the constructions are based on the technique of “Beilinson monad”. Let V be a finite-dimensional vector space over a field K and let W be its dual space. The basic idea behind a Beilinson monad is to represent a given coherent sheaf on P(W ) as a homology of a finite complex whose objects are direct sums of bundles of differentials. The differentials in the monad are given by homogeneous matrices over an exterior algebra E = V V . To construct a Beilinson monad for a given coherent sheaf, we typically take the following steps: Determine the type of the Beilinson monad, that is, determine each object, and then find differentials in the monad. -

Algebraic Surfaces with Minimal Betti Numbers
P. I. C. M. – 2018 Rio de Janeiro, Vol. 2 (717–736) ALGEBRAIC SURFACES WITH MINIMAL BETTI NUMBERS JH K (금종해) Abstract These are algebraic surfaces with the Betti numbers of the complex projective plane, and are called Q-homology projective planes. Fake projective planes and the complex projective plane are smooth examples. We describe recent progress in the study of such surfaces, singular ones and fake projective planes. We also discuss open questions. 1 Q-homology Projective Planes and Montgomery-Yang problem A normal projective surface with the Betti numbers of the complex projective plane CP 2 is called a rational homology projective plane or a Q-homology CP 2. When a normal projective surface S has only rational singularities, S is a Q-homology CP 2 if its second Betti number b2(S) = 1. This can be seen easily by considering the Albanese fibration on a resolution of S. It is known that a Q-homology CP 2 with quotient singularities (and no worse singu- larities) has at most 5 singular points (cf. Hwang and Keum [2011b, Corollary 3.4]). The Q-homology projective planes with 5 quotient singularities were classified in Hwang and Keum [ibid.]. In this section we summarize progress on the Algebraic Montgomery-Yang problem, which was formulated by J. Kollár. Conjecture 1.1 (Algebraic Montgomery–Yang Problem Kollár [2008]). Let S be a Q- homology projective plane with quotient singularities. Assume that S 0 := S Sing(S) is n simply connected. Then S has at most 3 singular points. This is the algebraic version of Montgomery–Yang Problem Fintushel and Stern [1987], which was originated from pseudofree circle group actions on higher dimensional sphere. -

A Brief Note on the Approach to the Conic Sections of a Right Circular Cone from Dynamic Geometry
View metadata, citation and similar papers at core.ac.uk brought to you by CORE provided by EPrints Complutense A brief note on the approach to the conic sections of a right circular cone from dynamic geometry Eugenio Roanes–Lozano Abstract. Nowadays there are different powerful 3D dynamic geometry systems (DGS) such as GeoGebra 5, Calques 3D and Cabri Geometry 3D. An obvious application of this software that has been addressed by several authors is obtaining the conic sections of a right circular cone: the dynamic capabilities of 3D DGS allows to slowly vary the angle of the plane w.r.t. the axis of the cone, thus obtaining the different types of conics. In all the approaches we have found, a cone is firstly constructed and it is cut through variable planes. We propose to perform the construction the other way round: the plane is fixed (in fact it is a very convenient plane: z = 0) and the cone is the moving object. This way the conic is expressed as a function of x and y (instead of as a function of x, y and z). Moreover, if the 3D DGS has algebraic capabilities, it is possible to obtain the implicit equation of the conic. Mathematics Subject Classification (2010). Primary 68U99; Secondary 97G40; Tertiary 68U05. Keywords. Conics, Dynamic Geometry, 3D Geometry, Computer Algebra. 1. Introduction Nowadays there are different powerful 3D dynamic geometry systems (DGS) such as GeoGebra 5 [2], Calques 3D [7, 10] and Cabri Geometry 3D [11]. Focusing on the most widespread one (GeoGebra 5) and conics, there is a “conics” icon in the ToolBar. -

Chapter 9: Conics Section 9.1 Ellipses
Chapter 9: Conics Section 9.1 Ellipses ..................................................................................................... 579 Section 9.2 Hyperbolas ............................................................................................... 597 Section 9.3 Parabolas and Non-Linear Systems ......................................................... 617 Section 9.4 Conics in Polar Coordinates..................................................................... 630 In this chapter, we will explore a set of shapes defined by a common characteristic: they can all be formed by slicing a cone with a plane. These families of curves have a broad range of applications in physics and astronomy, from describing the shape of your car headlight reflectors to describing the orbits of planets and comets. Section 9.1 Ellipses The National Statuary Hall1 in Washington, D.C. is an oval-shaped room called a whispering chamber because the shape makes it possible for sound to reflect from the walls in a special way. Two people standing in specific places are able to hear each other whispering even though they are far apart. To determine where they should stand, we will need to better understand ellipses. An ellipse is a type of conic section, a shape resulting from intersecting a plane with a cone and looking at the curve where they intersect. They were discovered by the Greek mathematician Menaechmus over two millennia ago. The figure below2 shows two types of conic sections. When a plane is perpendicular to the axis of the cone, the shape of the intersection is a circle. A slightly titled plane creates an oval-shaped conic section called an ellipse. 1 Photo by Gary Palmer, Flickr, CC-BY, https://www.flickr.com/photos/gregpalmer/2157517950 2 Pbroks13 (https://commons.wikimedia.org/wiki/File:Conic_sections_with_plane.svg), “Conic sections with plane”, cropped to show only ellipse and circle by L Michaels, CC BY 3.0 This chapter is part of Precalculus: An Investigation of Functions © Lippman & Rasmussen 2020. -

An Introduction to Moduli Spaces of Curves and Its Intersection Theory
An introduction to moduli spaces of curves and its intersection theory Dimitri Zvonkine∗ Institut math´ematiquede Jussieu, Universit´eParis VI, 175, rue du Chevaleret, 75013 Paris, France. Stanford University, Department of Mathematics, building 380, Stanford, California 94305, USA. e-mail: [email protected] Abstract. The material of this chapter is based on a series of three lectures for graduate students that the author gave at the Journ´eesmath´ematiquesde Glanon in July 2006. We introduce moduli spaces of smooth and stable curves, the tauto- logical cohomology classes on these spaces, and explain how to compute all possible intersection numbers between these classes. 0 Introduction This chapter is an introduction to the intersection theory on moduli spaces of curves. It is meant to be as elementary as possible, but still reasonably short. The intersection theory of an algebraic variety M looks for answers to the following questions: What are the interesting cycles (algebraic subvarieties) of M and what cohomology classes do they represent? What are the interesting vector bundles over M and what are their characteristic classes? Can we describe the full cohomology ring of M and identify the above classes in this ring? Can we compute their intersection numbers? In the case of moduli space, the full cohomology ring is still unknown. We are going to study its subring called the \tautological ring" that contains the classes of most interesting cycles and the characteristic classes of most interesting vector bundles. To give a sense of purpose to the reader, we assume the following goal: after reading this paper, one should be able to write a computer program evaluating ∗Partially supported by the NSF grant 0905809 \String topology, field theories, and the topology of moduli spaces". -

SINTESI DELLA TESI Enriques-Kodaira Classification Of
Universit`adegli Studi Roma Tre Facolta` di Scienze Matematiche, Fisiche e Naturali Corso di Laurea Magistrale in Matematica SINTESI DELLA TESI Enriques-Kodaira classification of Complex Algebraic Surfaces Candidato Relatore Cristian Minoccheri Prof.ssa Lucia Caporaso Anno Accademico 2011-12 Sessione di Luglio 2012 Our principal aim is to describe and prove the classification of complex algebraic surfaces, a result due to the Italian school of Algebraic Geometry at the beginning of the XX century, and in particular to Enriques. This classification is done up to birational maps, but it is different from the classi- fication of curves. In fact, in the case of curves there is a unique nonsingular projective model for each equivalence class, whereas in the case of surfaces this model is not unique. Therefore we will need to deal with something dif- ferent: the minimal models. In fact, apart from the case of ruled surfaces (i.e. those birational to the product of a curve and the projective line), these are unique and allow us to obtain birationally equivalent surfaces by successive blow-ups. Thus the classification problem will split in two parts: ruled surfaces, which require special considerations, and non-ruled ones, for which it will suffice to classify minimal models. For this, we will need some birational invariants, which capture the geometric peculiarities of each class, as we will see. A first rough classification is achieved by means of Kodaira dimension, κ, which is defined as the largest dimension of the image of the surface in a projective space by the rational map determined by the linear system jnKj, or as −1 if jnKj = ? for every n. -
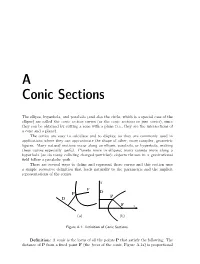
A Conic Sections
A Conic Sections The ellipse, hyperbola, and parabola (and also the circle, which is a special case of the ellipse) are called the conic section curves (or the conic sections or just conics), since they can be obtained by cutting a cone with a plane (i.e., they are the intersections of a cone and a plane). The conics are easy to calculate and to display, so they are commonly used in applications where they can approximate the shape of other, more complex, geometric figures. Many natural motions occur along an ellipse, parabola, or hyperbola, making these curves especially useful. Planets move in ellipses; many comets move along a hyperbola (as do many colliding charged particles); objects thrown in a gravitational field follow a parabolic path. There are several ways to define and represent these curves and this section uses asimplegeometric definition that leads naturally to the parametric and the implicit representations of the conics. y F P D P D F x (a) (b) Figure A.1: Definition of Conic Sections. Definition: A conic is the locus of all the points P that satisfy the following: The distance of P from a fixed point F (the focus of the conic, Figure A.1a) is proportional 364 A. Conic Sections to its distance from a fixed line D (the directrix). Using set notation, we can write Conic = {P|PF = ePD}, where e is the eccentricity of the conic. It is easy to classify conics by means of their eccentricity: =1, parabola, e = < 1, ellipse (the circle is the special case e = 0), > 1, hyperbola. -

Section 9.2 Hyperbolas 597
Section 9.2 Hyperbolas 597 Section 9.2 Hyperbolas In the last section, we learned that planets have approximately elliptical orbits around the sun. When an object like a comet is moving quickly, it is able to escape the gravitational pull of the sun and follows a path with the shape of a hyperbola. Hyperbolas are curves that can help us find the location of a ship, describe the shape of cooling towers, or calibrate seismological equipment. The hyperbola is another type of conic section created by intersecting a plane with a double cone, as shown below5. The word “hyperbola” derives from a Greek word meaning “excess.” The English word “hyperbole” means exaggeration. We can think of a hyperbola as an excessive or exaggerated ellipse, one turned inside out. We defined an ellipse as the set of all points where the sum of the distances from that point to two fixed points is a constant. A hyperbola is the set of all points where the absolute value of the difference of the distances from the point to two fixed points is a constant. 5 Pbroks13 (https://commons.wikimedia.org/wiki/File:Conic_sections_with_plane.svg), “Conic sections with plane”, cropped to show only a hyperbola by L Michaels, CC BY 3.0 598 Chapter 9 Hyperbola Definition A hyperbola is the set of all points Q (x, y) for which the absolute value of the difference of the distances to two fixed points F1(x1, y1) and F2 (x2, y2 ) called the foci (plural for focus) is a constant k: d(Q, F1 )− d(Q, F2 ) = k . -

Stable Rationality of Quadric and Cubic Surface Bundle Fourfolds
STABLE RATIONALITY OF QUADRIC AND CUBIC SURFACE BUNDLE FOURFOLDS ASHER AUEL, CHRISTIAN BOHNING,¨ AND ALENA PIRUTKA Abstract. We study the stable rationality problem for quadric and cubic surface bundles over surfaces from the point of view of the degeneration method for the Chow group of 0-cycles. Our main result is that a very general hypersurface X 2 3 of bidegree (2; 3) in P × P is not stably rational. Via projections onto the two 2 3 factors, X ! P is a cubic surface bundle and X ! P is a conic bundle, and we analyze the stable rationality problem from both these points of view. Also, 2 we introduce, for any n ≥ 4, new quadric surface bundle fourfolds Xn ! P with 2 discriminant curve Dn ⊂ P of degree 2n, such that Xn has nontrivial unramified Brauer group and admits a universally CH0-trivial resolution. 1. Introduction m An integral variety X over a field k is stably rational if X × P is rational, for some m. In recent years, failure of stable rationality has been established for many classes of smooth rationally connected projective complex varieties, see, for instance [1,3,4,7, 15, 16, 22, 23, 24, 25, 26, 27, 28, 29, 30, 33, 34, 36, 37]. These results were obtained by the specialization method, introduced by C. Voisin [37] and developed in [16]. In many applications, one uses this method in the following form. For simplicity, assume that k is an uncountable algebraically closed field and consider a quasi-projective integral scheme B over k and a generically smooth projective morphism X! B with positive dimensional fibers.