Practical Lock-Free and Wait-Free LL/SC/VL Implementations Using 64-Bit CAS
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Fast and Correct Load-Link/Store-Conditional Instruction Handling in DBT Systems
Fast and Correct Load-Link/Store-Conditional Instruction Handling in DBT Systems Abstract Atomic Read Memory Dynamic Binary Translation (DBT) requires the implemen- Operation tation of load-link/store-conditional (LL/SC) primitives for guest systems that rely on this form of synchronization. When Equals targeting e.g. x86 host systems, LL/SC guest instructions are YES NO typically emulated using atomic Compare-and-Swap (CAS) expected value? instructions on the host. Whilst this direct mapping is efficient, this approach is problematic due to subtle differences between Write new value LL/SC and CAS semantics. In this paper, we demonstrate that to memory this is a real problem, and we provide code examples that fail to execute correctly on QEMU and a commercial DBT system, Exchanged = true Exchanged = false which both use the CAS approach to LL/SC emulation. We then develop two novel and provably correct LL/SC emula- tion schemes: (1) A purely software based scheme, which uses the DBT system’s page translation cache for correctly se- Figure 1: The compare-and-swap instruction atomically reads lecting between fast, but unsynchronized, and slow, but fully from a memory address, and compares the current value synchronized memory accesses, and (2) a hardware acceler- with an expected value. If these values are equal, then a new ated scheme that leverages hardware transactional memory value is written to memory. The instruction indicates (usually (HTM) provided by the host. We have implemented these two through a return register or flag) whether or not the value was schemes in the Synopsys DesignWare® ARC® nSIM DBT successfully written. -

Concurrent Objects and Linearizability Concurrent Computaton
Concurrent Objects and Concurrent Computaton Linearizability memory Nir Shavit Subing for N. Lynch object Fall 2003 object © 2003 Herlihy and Shavit 2 Objectivism FIFO Queue: Enqueue Method • What is a concurrent object? q.enq( ) – How do we describe one? – How do we implement one? – How do we tell if we’re right? © 2003 Herlihy and Shavit 3 © 2003 Herlihy and Shavit 4 FIFO Queue: Dequeue Method Sequential Objects q.deq()/ • Each object has a state – Usually given by a set of fields – Queue example: sequence of items • Each object has a set of methods – Only way to manipulate state – Queue example: enq and deq methods © 2003 Herlihy and Shavit 5 © 2003 Herlihy and Shavit 6 1 Pre and PostConditions for Sequential Specifications Dequeue • If (precondition) – the object is in such-and-such a state • Precondition: – before you call the method, – Queue is non-empty • Then (postcondition) • Postcondition: – the method will return a particular value – Returns first item in queue – or throw a particular exception. • Postcondition: • and (postcondition, con’t) – Removes first item in queue – the object will be in some other state • You got a problem with that? – when the method returns, © 2003 Herlihy and Shavit 7 © 2003 Herlihy and Shavit 8 Pre and PostConditions for Why Sequential Specifications Dequeue Totally Rock • Precondition: • Documentation size linear in number –Queue is empty of methods • Postcondition: – Each method described in isolation – Throws Empty exception • Interactions among methods captured • Postcondition: by side-effects -
Goals of This Lecture How to Increase the Compute Power?
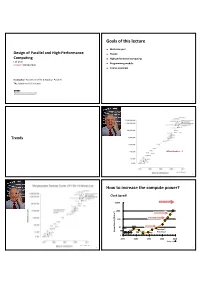
Goals of this lecture Motivate you! Design of Parallel and High-Performance Trends Computing High performance computing Fall 2017 Programming models Lecture: Introduction Course overview Instructor: Torsten Hoefler & Markus Püschel TA: Salvatore Di Girolamo 2 © Markus Püschel Computer Science Trends What doubles …? Source: Wikipedia 3 4 How to increase the compute power? Clock Speed! 10000 Sun’s Surface 1000 ) 2 Rocket Nozzle Nuclear Reactor 100 10 8086 Hot Plate 8008 8085 Pentium® Power Density (W/cm Power 4004 286 386 486 Processors 8080 1 1970 1980 1990 2000 2010 Source: Intel Source: Wikipedia 5 6 How to increase the compute power? Evolutions of Processors (Intel) Not an option anymore! Clock Speed! 10000 Sun’s Surface 1000 ) 2 Rocket Nozzle Nuclear Reactor 100 ~3 GHz Pentium 4 Core Nehalem Haswell Pentium III Sandy Bridge Hot Plate 10 8086 Pentium II 8008 free speedup 8085 Pentium® Pentium Pro Power Density (W/cm Power 4004 286 386 486 Processors 8080 Pentium 1 1970 1980 1990 2000 2010 Source: Intel 7 8 Source: Wikipedia/Intel/PCGuide Evolutions of Processors (Intel) Evolutions of Processors (Intel) Cores: 8x ~360 Gflop/s Vector units: 8x parallelism: work required 2 2 4 4 4 8 cores ~3 GHz Pentium 4 Core Nehalem Haswell Pentium III Sandy Bridge Pentium II Pentium Pro free speedup Pentium memory bandwidth (normalized) 9 10 Source: Wikipedia/Intel/PCGuide Source: Wikipedia/Intel/PCGuide A more complete view Source: www.singularity.com Can we do this today? 11 12 © Markus Püschel Computer Science High-Performance Computing (HPC) a.k.a. “Supercomputing” Question: define “Supercomputer”! High-Performance Computing 13 14 High-Performance Computing (HPC) a.k.a. -

Mastering Concurrent Computing Through Sequential Thinking
review articles DOI:10.1145/3363823 we do not have good tools to build ef- A 50-year history of concurrency. ficient, scalable, and reliable concur- rent systems. BY SERGIO RAJSBAUM AND MICHEL RAYNAL Concurrency was once a specialized discipline for experts, but today the chal- lenge is for the entire information tech- nology community because of two dis- ruptive phenomena: the development of Mastering networking communications, and the end of the ability to increase processors speed at an exponential rate. Increases in performance come through concur- Concurrent rency, as in multicore architectures. Concurrency is also critical to achieve fault-tolerant, distributed services, as in global databases, cloud computing, and Computing blockchain applications. Concurrent computing through sequen- tial thinking. Right from the start in the 1960s, the main way of dealing with con- through currency has been by reduction to se- quential reasoning. Transforming problems in the concurrent domain into simpler problems in the sequential Sequential domain, yields benefits for specifying, implementing, and verifying concur- rent programs. It is a two-sided strategy, together with a bridge connecting the Thinking two sides. First, a sequential specificationof an object (or service) that can be ac- key insights ˽ A main way of dealing with the enormous challenges of building concurrent systems is by reduction to sequential I must appeal to the patience of the wondering readers, thinking. Over more than 50 years, more sophisticated techniques have been suffering as I am from the sequential nature of human developed to build complex systems in communication. this way. 12 ˽ The strategy starts by designing —E.W. -

A Separation Logic for Refining Concurrent Objects
A Separation Logic for Refining Concurrent Objects Aaron Turon ∗ Mitchell Wand Northeastern University {turon, wand}@ccs.neu.edu Abstract do { tmp = *C; } until CAS(C, tmp, tmp+1); Fine-grained concurrent data structures are crucial for gaining per- implements inc using an optimistic approach: it takes a snapshot formance from multiprocessing, but their design is a subtle art. Re- of the counter without acquiring a lock, computes the new value cent literature has made large strides in verifying these data struc- of the counter, and uses compare-and-set (CAS) to safely install the tures, using either atomicity refinement or separation logic with new value. The key is that CAS compares *C with the value of tmp, rely-guarantee reasoning. In this paper we show how the owner- atomically updating *C with tmp + 1 and returning true if they ship discipline of separation logic can be used to enable atomicity are the same, and just returning false otherwise. refinement, and we develop a new rely-guarantee method that is lo- Even for this simple data structure, the fine-grained imple- calized to the definition of a data structure. We present the first se- mentation significantly outperforms the lock-based implementa- mantics of separation logic that is sensitive to atomicity, and show tion [17]. Likewise, even for this simple example, we would prefer how to control this sensitivity through ownership. The result is a to think of the counter in a more abstract way when reasoning about logic that enables compositional reasoning about atomicity and in- its clients, giving it the following specification: terference, even for programs that use fine-grained synchronization and dynamic memory allocation. -

Core Processors
UNIVERSITY OF CALIFORNIA Los Angeles Parallel Algorithms for Medical Informatics on Data-Parallel Many-Core Processors A dissertation submitted in partial satisfaction of the requirements for the degree Doctor of Philosophy in Computer Science by Maryam Moazeni 2013 © Copyright by Maryam Moazeni 2013 ABSTRACT OF THE DISSERTATION Parallel Algorithms for Medical Informatics on Data-Parallel Many-Core Processors by Maryam Moazeni Doctor of Philosophy in Computer Science University of California, Los Angeles, 2013 Professor Majid Sarrafzadeh, Chair The extensive use of medical monitoring devices has resulted in the generation of tremendous amounts of data. Storage, retrieval, and analysis of such data require platforms that can scale with data growth and adapt to the various behavior of the analysis and processing algorithms. In recent years, many-core processors and more specifically many-core Graphical Processing Units (GPUs) have become one of the most promising platforms for high performance processing of data, due to the massive parallel processing power they offer. However, many of the algorithms and data structures used in medical and bioinformatics systems do not follow a data-parallel programming paradigm, and hence cannot fully benefit from the parallel processing power of ii data-parallel many-core architectures. In this dissertation, we present three techniques to adapt several non-data parallel applications in different dwarfs to modern many-core GPUs. First, we present a load balancing technique to maximize parallelism in non-serial polyadic Dynamic Programming (DP), which is a family of dynamic programming algorithms with more non-uniform data access pattern. We show that a bottom-up approach to solving the DP problem exploits more parallelism and therefore yields higher performance. -

Lock-Free Programming
Lock-Free Programming Geoff Langdale L31_Lockfree 1 Desynchronization ● This is an interesting topic ● This will (may?) become even more relevant with near ubiquitous multi-processing ● Still: please don’t rewrite any Project 3s! L31_Lockfree 2 Synchronization ● We received notification via the web form that one group has passed the P3/P4 test suite. Congratulations! ● We will be releasing a version of the fork-wait bomb which doesn't make as many assumptions about task id's. – Please look for it today and let us know right away if it causes any trouble for you. ● Personal and group disk quotas have been grown in order to reduce the number of people running out over the weekend – if you try hard enough you'll still be able to do it. L31_Lockfree 3 Outline ● Problems with locking ● Definition of Lock-free programming ● Examples of Lock-free programming ● Linux OS uses of Lock-free data structures ● Miscellanea (higher-level constructs, ‘wait-freedom’) ● Conclusion L31_Lockfree 4 Problems with Locking ● This list is more or less contentious, not equally relevant to all locking situations: – Deadlock – Priority Inversion – Convoying – “Async-signal-safety” – Kill-tolerant availability – Pre-emption tolerance – Overall performance L31_Lockfree 5 Problems with Locking 2 ● Deadlock – Processes that cannot proceed because they are waiting for resources that are held by processes that are waiting for… ● Priority inversion – Low-priority processes hold a lock required by a higher- priority process – Priority inheritance a possible solution L31_Lockfree -

Concurrent and Parallel Programming
Concurrent and parallel programming Seminars in Advanced Topics in Computer Science Engineering 2019/2020 Romolo Marotta Trend in processor technology Concurrent and parallel programming 2 Blocking synchronization SHARED RESOURCE Concurrent and parallel programming 3 Blocking synchronization …zZz… SHARED RESOURCE Concurrent and parallel programming 4 Blocking synchronization Correctness guaranteed by mutual exclusion …zZz… SHARED RESOURCE Performance might be hampered because of waste of clock cycles Liveness might be impaired due to the arbitration of accesses Concurrent and parallel programming 5 Parallel programming • Ad-hoc concurrent programming languages • Development tools ◦ Compilers ◦ MPI, OpenMP, libraries ◦ Tools to debug parallel code (gdb, valgrind) • Writing parallel code is an art ◦ There are approaches, not prepackaged solutions ◦ Every machine has its own singularities ◦ Every problem to face has different requisites ◦ The most efficient parallel algorithm might not be the most intuitive one Concurrent and parallel programming 6 What do we want from parallel programs? • Safety: nothing wrong happens (Correctness) ◦ parallel versions of our programs should be correct as their sequential implementations • Liveliness: something good happens eventually (Progress) ◦ if a sequential program terminates with a given input, we want that its parallel alternative also completes with the same input • Performance ◦ we want to exploit our parallel hardware Concurrent and parallel programming 7 Correctness conditions Progress conditions -
![Arxiv:2012.03692V1 [Cs.DC] 7 Dec 2020](https://docslib.b-cdn.net/cover/5194/arxiv-2012-03692v1-cs-dc-7-dec-2020-1485194.webp)
Arxiv:2012.03692V1 [Cs.DC] 7 Dec 2020
Separation and Equivalence results for the Crash-stop and Crash-recovery Shared Memory Models Ohad Ben-Baruch Srivatsan Ravi Ben-Gurion University, Israel University of Southern California, USA [email protected] [email protected] December 8, 2020 Abstract Linearizability, the traditional correctness condition for concurrent data structures is considered insufficient for the non-volatile shared memory model where processes recover following a crash. For this crash-recovery shared memory model, strict-linearizability is considered appropriate since, unlike linearizability, it ensures operations that crash take effect prior to the crash or not at all. This work formalizes and answers the question of whether an implementation of a data type derived for the crash-stop shared memory model is also strict-linearizable in the crash-recovery model. This work presents a rigorous study to prove how helping mechanisms, typically employed by non-blocking implementations, is the algorithmic abstraction that delineates linearizabil- ity from strict-linearizability. Our first contribution formalizes the crash-recovery model and how explicit process crashes and recovery introduces further dimensionalities over the stan- dard crash-stop shared memory model. We make the following technical contributions that answer the question of whether a help-free linearizable implementation is strict-linearizable in the crash-recovery model: (i) we prove surprisingly that there exist linearizable imple- mentations of object types that are help-free, yet not strict-linearizable; (ii) we then present a natural definition of help-freedom to prove that any obstruction-free, linearizable and help-free implementation of a total object type is also strict-linearizable. The next technical contribution addresses the question of whether a strict-linearizable implementation in the crash-recovery model is also help-free linearizable in the crash-stop model. -

Multithreading for Gamedev Students
Multithreading for Gamedev Students Keith O’Conor 3D Technical Lead Ubisoft Montreal @keithoconor - Who I am - PhD (Trinity College Dublin), Radical Entertainment (shipped Prototype 1 & 2), Ubisoft Montreal (shipped Watch_Dogs & Far Cry 4) - Who this is aimed at - Game programming students who don’t necessarily come from a strict computer science background - Some points might be basic for CS students, but all are relevant to gamedev - Slides available online at fragmentbuffer.com Overview • Hardware support • Common game engine threading models • Race conditions • Synchronization primitives • Atomics & lock-free • Hazards - Start at high level, finish in the basement - Will also talk about potential hazards and give an idea of why multithreading is hard Overview • Only an introduction ◦ Giving a vocabulary ◦ See references for further reading ◦ Learn by doing, hair-pulling - Way too big a topic for a single talk, each section could be its own series of talks Why multithreading? - Hitting power & heat walls when going for increased frequency alone - Go wide instead of fast - Use available resources more efficiently - Taken from http://www.karlrupp.net/2015/06/40-years-of-microprocessor- trend-data/ Hardware multithreading Hardware support - Before we use multithreading in games, we need to understand the various levels of hardware support that allow multiple instructions to be executed in parallel - There are many more aspects to hardware multithreading than we’ll look at here (processor pipelining, cache coherency protocols etc.) - Again, -

A Task Parallel Approach Bachelor Thesis Paul Blockhaus
Otto-von-Guericke-University Magdeburg Faculty of Computer Science Department of Databases and Software Engineering Parallelizing the Elf - A Task Parallel Approach Bachelor Thesis Author: Paul Blockhaus Advisors: Prof. Dr. rer. nat. habil. Gunter Saake Dr.-Ing. David Broneske Otto-von-Guericke-University Magdeburg Department of Databases and Software Engineering Dr.-Ing. Martin Schäler Karlsruhe Institute of Technology Department of Databases and Information Systems Magdeburg, November 29, 2019 Acknowledgements First and foremost I wish to thank my advisor, Dr.-Ing. David Broneske for sparking my interest in database systems, introducing me to the Elf and supporting me throughout the work on this thesis. I would also like to thank Prof. Dr. rer. nat. habil. Gunter Saake for the opportunity to write this thesis in the DBSE research group. Also a big thank you to Dr.-Ing. Martin Schäler for his valuable feedback. Finally I want to thank my family and my cat for their support and encouragement throughout my study. Abstract Analytical database queries become more and more compute intensive while at the same time the computing power of the CPUs stagnates. This leads to new approaches to accelerate complex selection predicates, which are common in analytical queries. One state of the art approach is the Elf, a highly optimized tree structure which utilizes prefix sharing to optimize multi-predicate selection queries to aim for bare metal speed. However, this approach leaves many capabilities that modern hardware offers aside. One of the most popular capabilities that results in huge speed-ups is the utilization of multiple cores, offered by modern CPUs. -

Round-Up: Runtime Checking Quasi Linearizability Of
Round-Up: Runtime Checking Quasi Linearizability of Concurrent Data Structures Lu Zhang, Arijit Chattopadhyay, and Chao Wang Department of ECE, Virginia Tech Blacksburg, VA 24061, USA {zhanglu, arijitvt, chaowang }@vt.edu Abstract —We propose a new method for runtime checking leading to severe performance bottlenecks. Quasi linearizabil- of a relaxed consistency property called quasi linearizability for ity preserves the intuition of standard linearizability while concurrent data structures. Quasi linearizability generalizes the providing some additional flexibility in the implementation. standard notion of linearizability by intentionally introducing nondeterminism into the parallel computations and exploiting For example, the task queue used in the scheduler of a thread such nondeterminism to improve the performance. However, pool does not need to follow the strict FIFO order. One can ensuring the quantitative aspects of this correctness condition use a relaxed queue that allows some tasks to be overtaken in the low level code is a difficult task. Our method is the occasionally if such relaxation leads to superior performance. first fully automated method for checking quasi linearizability Similarly, concurrent data structures used for web cache need in the unmodified C/C++ code of concurrent data structures. It guarantees that all the reported quasi linearizability violations not follow the strict semantics of the standard versions, since are real violations. We have implemented our method in a occasionally getting the stale data is acceptable. In distributed software tool based on LLVM and a concurrency testing tool systems, the unique id generator does not need to be a perfect called Inspect. Our experimental evaluation shows that the new counter; to avoid becoming a performance bottleneck, it is method is effective in detecting quasi linearizability violations in often acceptable for the ids to be out of order occasionally, the source code of concurrent data structures.