The Automated Planet Finder at Lick Observatory
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Pre-Vetted False Positives for TESS
Swarthmore College Works Physics & Astronomy Faculty Works Physics & Astronomy 11-1-2018 The KELT Follow-Up Network And Transit False-Positive Catalog: Pre-Vetted False Positives For TESS K. A. Collins K. I. Collins FJ.ollow Pepper this and additional works at: https://works.swarthmore.edu/fac-physics J. Labadie-Bar Part of the Astrtz ophysics and Astronomy Commons Let us know how access to these works benefits ouy K. G. Stassun See next page for additional authors Recommended Citation K. A. Collins, K. I. Collins, J. Pepper, J. Labadie-Bartz, K. G. Stassun, B. S. Gaudi, D. Bayliss, J. Bento, K. D. Colón, D. Feliz, D. James, M. C. Johnson, R. B. Kuhn, M. B. Lund, M. T. Penny, J. E. Rodriguez, R. J. Siverd, D. J. Stevens, X. Yao, G. Zhou, M. Akshay, G. F. Aldi, C. Ashcraft, S. Awiphan, Ö. Baştürk, D. Baker, T. G. Beatty, P. Benni, P. Berlind, G. B. Berriman, Z. Berta-Thompson, A. Bieryla, V. Bozza, S. C. Novati, M. L. Calkins, J. M. Cann, D. R. Ciardi, W. D. Cochran, David H. Cohen, D. Conti, J. R. Crepp, I. A. Curtis, G. D'Ago, K. A. Diazeguigure, C. D. Dressing, F. Dubois, E. Ellington, T. G. Ellis, G. A. Esquerdo, P. Evans, A. Friedli, A. Fukui, B. J. Fulton, E. J. Gonzales, J. C. Good, J. Gregorio, T. Gumusayak, D. A. Hancock, C. K. Harada, R. Hart, E. G. Hintz, H. Jang-Condell, E. J. Jeffery, Eric L.N. Jensen, E. Jofré, M. D. Joner, A. Kar, D. H. Kasper, B. Keten, J. -

Exoplanet Community Report
JPL Publication 09‐3 Exoplanet Community Report Edited by: P. R. Lawson, W. A. Traub and S. C. Unwin National Aeronautics and Space Administration Jet Propulsion Laboratory California Institute of Technology Pasadena, California March 2009 The work described in this publication was performed at a number of organizations, including the Jet Propulsion Laboratory, California Institute of Technology, under a contract with the National Aeronautics and Space Administration (NASA). Publication was provided by the Jet Propulsion Laboratory. Compiling and publication support was provided by the Jet Propulsion Laboratory, California Institute of Technology under a contract with NASA. Reference herein to any specific commercial product, process, or service by trade name, trademark, manufacturer, or otherwise, does not constitute or imply its endorsement by the United States Government, or the Jet Propulsion Laboratory, California Institute of Technology. © 2009. All rights reserved. The exoplanet community’s top priority is that a line of probeclass missions for exoplanets be established, leading to a flagship mission at the earliest opportunity. iii Contents 1 EXECUTIVE SUMMARY.................................................................................................................. 1 1.1 INTRODUCTION...............................................................................................................................................1 1.2 EXOPLANET FORUM 2008: THE PROCESS OF CONSENSUS BEGINS.....................................................2 -
Nasa and the Search for Technosignatures
NASA AND THE SEARCH FOR TECHNOSIGNATURES A Report from the NASA Technosignatures Workshop NOVEMBER 28, 2018 NASA TECHNOSIGNATURES WORKSHOP REPORT CONTENTS 1 INTRODUCTION .................................................................................................................................................................... 1 What are Technosignatures? .................................................................................................................................... 2 What Are Good Technosignatures to Look For? ....................................................................................................... 2 Maturity of the Field ................................................................................................................................................... 5 Breadth of the Field ................................................................................................................................................... 5 Limitations of This Document .................................................................................................................................... 6 Authors of This Document ......................................................................................................................................... 6 2 EXISTING UPPER LIMITS ON TECHNOSIGNATURES ....................................................................................................... 9 Limits and the Limitations of Limits ........................................................................................................................... -
Introduction (PDF)
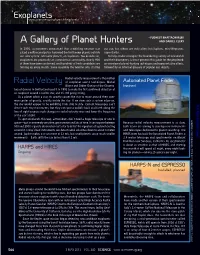
Section Name –YUDHIJIT BHATTACHARJEE AND DANIEL CLERY In 1992, astronomers announced that a whirling neutron star our sun, but others are truly alien: hot Jupiters, mini-Neptunes, called a millisecond pulsar harbored the fi rst known planets outside super-Earths. our solar system: extrasolar planets, or exoplanets. Two decades on, To help readers navigate the bewildering variety of new worlds exoplanets are practically an astronomical commodity. Nearly 900 and their discoverers, Science presents this guide for the perplexed: of them have been confi rmed, and hundreds of fresh candidates are an overview of planet-hunting techniques and representative efforts, turning up every month. Some resemble the familiar orbs circling followed by an informal glossary of popular exo-objects. Radial velocity measurement is the mother of exoplanet search techniques. Michel Mayor and Didier Queloz of the Observa- tory of Geneva in Switzerland used it in 1995 to make the fi rst confi rmed detection of an exoplanet around a sunlike star, and it’s still going strong. As a planet orbits a star, its gravity causes the star to move around their com- mon center of gravity, usually inside the star. If we view such a system edge-on, the star would appear to be wobbling from side to side. Current telescopes can’t on May 4, 2013 detect such tiny movements, but they can spot a wobble back and forth along the line of sight because such changes in radial velocity raise and lower the frequency of the star’s light. To spot exoplanets this way, astronomers don’t need a huge telescope or one in S space—just an extremely sensitive spectrometer and lots of time. -

Abstracts of Extreme Solar Systems 4 (Reykjavik, Iceland)
Abstracts of Extreme Solar Systems 4 (Reykjavik, Iceland) American Astronomical Society August, 2019 100 — New Discoveries scope (JWST), as well as other large ground-based and space-based telescopes coming online in the next 100.01 — Review of TESS’s First Year Survey and two decades. Future Plans The status of the TESS mission as it completes its first year of survey operations in July 2019 will bere- George Ricker1 viewed. The opportunities enabled by TESS’s unique 1 Kavli Institute, MIT (Cambridge, Massachusetts, United States) lunar-resonant orbit for an extended mission lasting more than a decade will also be presented. Successfully launched in April 2018, NASA’s Tran- siting Exoplanet Survey Satellite (TESS) is well on its way to discovering thousands of exoplanets in orbit 100.02 — The Gemini Planet Imager Exoplanet Sur- around the brightest stars in the sky. During its ini- vey: Giant Planet and Brown Dwarf Demographics tial two-year survey mission, TESS will monitor more from 10-100 AU than 200,000 bright stars in the solar neighborhood at Eric Nielsen1; Robert De Rosa1; Bruce Macintosh1; a two minute cadence for drops in brightness caused Jason Wang2; Jean-Baptiste Ruffio1; Eugene Chiang3; by planetary transits. This first-ever spaceborne all- Mark Marley4; Didier Saumon5; Dmitry Savransky6; sky transit survey is identifying planets ranging in Daniel Fabrycky7; Quinn Konopacky8; Jennifer size from Earth-sized to gas giants, orbiting a wide Patience9; Vanessa Bailey10 variety of host stars, from cool M dwarfs to hot O/B 1 KIPAC, Stanford University (Stanford, California, United States) giants. 2 Jet Propulsion Laboratory, California Institute of Technology TESS stars are typically 30–100 times brighter than (Pasadena, California, United States) those surveyed by the Kepler satellite; thus, TESS 3 Astronomy, California Institute of Technology (Pasadena, Califor- planets are proving far easier to characterize with nia, United States) follow-up observations than those from prior mis- 4 Astronomy, U.C. -
2020 Science Gap List
ExEP Science Gap List, Rev C JPL D: 1717112 Release Date: January 1, 2020 Page 1 of 21 Approved by: Dr. Gary Blackwood Date Program Manager, Exoplanet Exploration Program Office NASA/Jet Propulsion Laboratory Dr. Douglas Hudgins Date Program Scientist Exoplanet Exploration Program Science Mission Directorate NASA Headquarters EXOPLANET EXPLORATION PROGRAM Science Gap List 2020 Karl Stapelfeldt, Program Chief Scientist Eric Mamajek, Deputy Program Chief Scientist Exoplanet Exploration Program JPL CL#20-1234 CL#20-1234 JPL Document No: 1717112 ExEP Science Gap List, Rev C JPL D: 1717112 Release Date: January 1, 2020 Page 2 of 21 Cover Art Credit: NASA/JPL-Caltech. Artist conception of the K2-138 exoplanetary system, the first multi-planet system ever discovered by citizen scientists1. K2-138 is an orangish (K1) main sequence star about 200 parsecs away, with five known planets all between the size of Earth and Neptune orbiting in a very compact architecture. The planet’s orbits form an unbroken chain of 3:2 resonances, with orbital periods ranging from 2.3 and 12.8 days, orbiting the star between 0.03 and 0.10 AU. The limb of the hot sub-Neptunian world K2-138 f looms in the foreground at the bottom, with close neighbor K2-138 e visible (center) and the innermost planet K2-138 b transiting its star. The discovery study of the K2-138 system was led by Jessie Christiansen and collaborators (2018, Astronomical Journal, Volume 155, article 57). This research was carried out at the Jet Propulsion Laboratory, California Institute of Technology, under a contract with the National Aeronautics and Space Administration. -
Astro2010: the Astronomy and Astrophysics Decadal Survey
Astro2010: The Astronomy and Astrophysics Decadal Survey Notices of Interest 1. 4 m space telescope for terrestrial planet imaging and wide field astrophysics Point of Contact: Roger Angel, University of Arizona Summary Description: The proposed 4 m telescope combines capabilities for imaging terrestrial exoplanets and for general astrophysics without compromising either. Extremely high contrast imaging at very close inner working angle, as needed for terrestrial planet imaging, is accomplished by the powerful phase induced amplitude apodization method (PIAA) developed by Olivier Guyon. This method promises 10-10 contrast at 2.0 l/D angular separation, i.e. 50 mas for a 4 m telescope at 500 nm wavelength. The telescope primary mirror is unobscured with off-axis figure, as needed to achieve such high contrast. Despite the off-axis primary, the telescope nevertheless provides also a very wide field for general astrophysics. A 3 mirror anastigmat design by Jim Burge delivers a 6 by 24 arcminute field whose mean wavefront error of 12 nm rms, i.e.diffraction limited at 360 nm wavelength. Over the best 10 square arcminutes the rms error is 7 nm, for diffraction limited imaging at 200 nm wavelength. Any of the instruments can be fed by part or all of the field, by means of a flat steering mirror at the exit pupil. To allow for this, the field is curved with a radius equal to the distance from the exit pupil. The entire optical system fits in a 4 m diameter cylinder, 8 m long. Many have considered that only by using two spacecraft, a conventional on-axis telescope and a remote occulter, could high contrast and wide field imaging goals be reconciled. -

An Additional Non-Transiting Super-Earth in the Bright HD 3167 System, and Masses for All Three Planets
The Astronomical Journal, 154:122 (17pp), 2017 September https://doi.org/10.3847/1538-3881/aa832d © 2017. The American Astronomical Society. All rights reserved. Three’s Company: An Additional Non-transiting Super-Earth in the Bright HD 3167 System, and Masses for All Three Planets Jessie L. Christiansen1 , Andrew Vanderburg2 , Jennifer Burt3 , B. J. Fulton4,5 , Konstantin Batygin6, Björn Benneke6, John M. Brewer7 , David Charbonneau2 , David R. Ciardi1, Andrew Collier Cameron8, Jeffrey L. Coughlin9,10 , Ian J. M. Crossfield11,32, Courtney Dressing6,32 , Thomas P. Greene9 , Andrew W. Howard5 , David W. Latham2 , Emilio Molinari12,13 , Annelies Mortier8 , Fergal Mullally10, Francesco Pepe14, Ken Rice15, Evan Sinukoff4,5 , Alessandro Sozzetti16 , Susan E. Thompson9,10 , Stéphane Udry14, Steven S. Vogt17 , Travis S. Barman18 , Natasha E. Batalha19 , François Bouchy14, Lars A. Buchhave20 , R. Paul Butler21 , Rosario Cosentino13, Trent J. Dupuy22 , David Ehrenreich14 , Aldo Fiorenzano13, Brad M. S. Hansen23, Thomas Henning24, Lea Hirsch25 , Bradford P. Holden17 , Howard T. Isaacson25 , John A. Johnson2, Heather A. Knutson6, Molly Kosiarek11 , Mercedes López-Morales2, Christophe Lovis14, Luca Malavolta26,27 , Michel Mayor14, Giuseppina Micela28, Fatemeh Motalebi14, Erik Petigura6 , David F. Phillips2, Giampaolo Piotto26,27 , Leslie A. Rogers29 , Dimitar Sasselov2 , Joshua E. Schlieder33 , Damien Ségransan14, Christopher A. Watson30, and Lauren M. Weiss31,34 1 NASA Exoplanet Science Institute, California Institute of Technology, M/S 100-22, 770 -

ANNUAL STATISTICS 2019 Imprint
ANNUAL STATISTICS 2019 Imprint Publisher: Max Planck Institute for extraterrestrial Physics Editors and Layout: W. Collmar, B. Niebisch Personnel 1 Personnel 2019 Directors MdB F. Hahn, member of the Bundestag, Berlin Prof. Dr. R. Bender, Optical and Interpretative Astronomy, Prof. Dr. B. Huber, President of the Ludwig Maximilians also Professorship for Astronomy/Astrophysics at the University, Munich Ludwig Maximilians University Munich Dr. F. Merkle, OHB System AG, Bremen Prof. Dr. P. Caselli, Center for Astrochemical Studies (ma- Dr. U. von Rauchhaupt, Frankfurter Allgemeine Zeitung, naging director) Frankfurt/Main Prof. Dr. R. Genzel, Infrared and Submillimeter Astrono- Prof. R. Rodenstock, Optische Werke G. Rodenstock my, also Prof. of Physics, University of California, Berke- GmbH & Co. KG, Munich ley (USA) Dr. J. Rubner, Bayerischer Rundfunk, Munich Prof. Dr. K. Nandra, High-Energy Astrophysics Dr. M. Wolter, Bavarian Ministry of Economy, Energy und Prof. Dr. G. Haerendel (emeritus) Technology, Munich Prof. Dr. R. Lüst (emeritus) Prof. Dr. G. Morfi ll (emeritus) Scientifi c Advisory Board Prof. Dr. K. Pinkau (emeritus) Prof. Dr. C. Canizares, MIT, Kavli Institute, Cambridge (USA) Prof. Dr. J. Trümper (emeritus) Prof. Dr. A. Celotti, SISSA, Trieste (Italy) Junior Research Groups Prof. Dr. N. Evans, The University of Texas at Austin, Dr. J. Dexter Austin (USA) Dr. S. Gillessen Prof. Dr. K. Freeman, Mt Stromlo Observatory, Weston Creek (Australia) MPG Fellow Prof. Dr. A. Goodman, Harvard-Smithsonian Center for Prof. Dr. J. Mohr (LMU) Astrophysics, Cambridge (USA) Prof. Dr. R. C. Kennicutt, University of Arizona, Tucson Manager's Assistant (USA) & Texas A&M University, College Station (USA) Dr. D. Lutz Prof. -
Technosignature Report Final 121619
NASA AND THE SEARCH FOR TECHNOSIGNATURES A Report from the NASA Technosignatures Workshop NOVEMBER 28, 2018 NASA TECHNOSIGNATURES WORKSHOP REPORT CONTENTS 1 INTRODUCTION .................................................................................................................................................................... 1 1.1 What are Technosignatures? .................................................................................................................................... 2 1.2 What Are Good Technosignatures to Look For? ....................................................................................................... 2 1.3 Maturity of the Field ................................................................................................................................................... 5 1.4 Breadth of the Field ................................................................................................................................................... 5 1.5 Limitations of This Document .................................................................................................................................... 6 1.6 Authors of This Document ......................................................................................................................................... 6 2 EXISTING UPPER LIMITS ON TECHNOSIGNATURES ....................................................................................................... 9 2.1 Limits and the Limitations of Limits ........................................................................................................................... -

The KELT Follow-Up Network and Transit False Positive Catalog: Pre-Vetted False Positives for TESS
DRAFT VERSION SEPTEMBER 20, 2018 Typeset using LATEX twocolumn style in AASTeX62 The KELT Follow-Up Network and Transit False Positive Catalog: Pre-vetted False Positives for TESS KAREN A. COLLINS,1 KEVIN I. COLLINS,2 JOSHUA PEPPER,3 JONATHAN LABADIE-BARTZ,3, 4 KEIVAN G. STASSUN,2, 5 B. SCOTT GAUDI,6 DANIEL BAYLISS,7, 8 JOAO BENTO,8 KNICOLE D. COLON´ ,9 DAX FELIZ,5, 2 DAVID JAMES,10 MARSHALL C. JOHNSON,6 RUDOLF B. KUHN,11, 12 MICHAEL B. LUND,2 MATTHEW T. PENNY,6 JOSEPH E. RODRIGUEZ,1 ROBERT J. SIVERD,13 DANIEL J. STEVENS,6 XINYU YAO,3 GEORGE ZHOU,1, 14 MUNDRA AKSHAY,15 GIULIO F. ALDI,16, 17 CLIFF ASHCRAFT,18 SUPACHAI AWIPHAN,19 O¨ ZGUR¨ BAS¸ TURK¨ ,20 DAVID BAKER,21 THOMAS G. BEATTY,22, 23 PAUL BENNI,24 PERRY BERLIND,1 G. BRUCE BERRIMAN,25 ZACH BERTA-THOMPSON,26 ALLYSON BIERYLA,1 VALERIO BOZZA,16, 17 SEBASTIANO CALCHI NOVATI,27 MICHAEL L. CALKINS,1 JENNA M. CANN,28 DAVID R. CIARDI,29 IAN R. CLARK,30 WILLIAM D. COCHRAN,31 DAVID H. COHEN,32 DENNIS CONTI,33 JUSTIN R. CREPP,34 IVAN A. CURTIS,35 GIUSEPPE D’AGO,36 KENNY A. DIAZEGUIGURE ,37 COURTNEY D. DRESSING,38 FRANKY DUBOIS,39 ERICA ELLINGSON,26 TYLER G. ELLIS,40 GILBERT A. ESQUERDO,1 PHIL EVANS,41 ALISON FRIEDLI,26 AKIHIKO FUKUI,42 BENJAMIN J. FULTON,43 ERICA J. GONZALES,44 JOHN C. GOOD,25 JOAO GREGORIO,45 TOLGA GUMUSAYAK,18 DANIEL A. HANCOCK,46 CALEB K. HARADA,37 RHODES HART,47 ERIC G. -

Instrumentation for the Detection and Characterization of Exoplanets
Instrumentation for the detection and characterization of exoplanets Francesco Pepe1, David Ehrenreich1, Michael R. Meyer2 1Observatoire Astronomique de l'Université de Genève, 51 ch. des Maillettes, 1290 Versoix, Switzerland 2Swiss Federal Institute of Technology, Institute for Astronomy, Wolfgang-Pauli-Strasse 27, 8093 Zurich, Switzerland In no other field of astrophysics has the impact of new instrumentation been as substantial as in the domain of exoplanets. Before 1995 our knowledge about exoplanets was mainly based on philosophical and theoretical considerations. The following years have been marked, instead, by surprising discoveries made possible by high-precision instruments. More recently the availability of new techniques moved the focus from detection to the characterization of exoplanets. Next- generation facilities will produce even more complementary data that will lead to a comprehensive view of exoplanet characteristics and, by comparison with theoretical models, to a better understanding of planet formation. Astrometry is the most ancient technique of astronomy. It is therefore not surprising that the first (unconfirmed) detection of an extra-solar planet arose through this technique1. In 1984, another detection of a planetary-mass object around the nearby star VB 8 was claimed, this time using speckle interferometry2, but subsequent attempts to locate it were unsuccessful. It was finally Doppler velocimetry that delivered the first unambiguous detection of a probable brown dwarf around HD 1147623. In 1992, a handful of bodies of terrestrial mass were found4 and confirmed, by the measurement of timing variation, to orbit the pulsar PSR1257+12. Although very powerful, this technique was restricted to a small number of very particular hosts.