A Cognitive Resource Management Framework for Autonomous Ground Vehicle Sensing
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Result Build a Self-Driving Network
SELF-DRIVING NETWORKS “LOOK, MA: NO HANDS” Kireeti Kompella CTO, Engineering Juniper Networks ITU FG Net2030 Geneva, Oct 2019 © 2019 Juniper Networks 1 Juniper Public VISION © 2019 Juniper Networks Juniper Public THE DARPA GRAND CHALLENGE BUILD A FULLY AUTONOMOUS GROUND VEHICLE IMPACT • Programmers, not drivers • No cops, lawyers, witnesses GOAL • Quadruple highway capacity Drive a pre-defined 240km course in the Mojave Desert along freeway I-15 • Glitches, insurance? • Ethical Self-Driving Cars? PRIZE POSSIBILITIES $1 Million RESULT 2004: Fail (best was less than 12km!) 2005: 5/23 completed it 2007: “URBAN CHALLENGE” Drive a 96km urban course following traffic regulations & dealing with other cars 6 cars completed this © 2019 Juniper Networks 3 Juniper Public GRAND RESULT: THE SELF-DRIVING CAR: (2009, 2014) No steering wheel, no pedals— a completely autonomous car Not just an incremental improvement This is a DISRUPTIVE change in automotive technology! © 2019 Juniper Networks 4 Juniper Public THE NETWORKING GRAND CHALLENGE BUILD A SELF-DRIVING NETWORK IMPACT • New skill sets required GOAL • New focus • BGP/IGP policies AI policy Self-Discover—Self-Configure—Self-Monitor—Self-Correct—Auto-Detect • Service config service design Customers—Auto-Provision—Self-Diagnose—Self-Optimize—Self-Report • Reactive proactive • Firewall rules anomaly detection RESULT Free up people to work at a higher-level: new service design and “mash-ups” POSSIBILITIES Agile, even anticipatory service creation Fast, intelligent response to security breaches CHALLENGE -
An Off-Road Autonomous Vehicle for DARPA's Grand Challenge
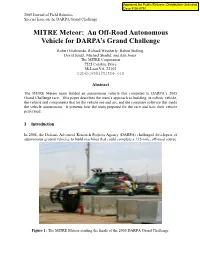
2005 Journal of Field Robotics Special Issue on the DARPA Grand Challenge MITRE Meteor: An Off-Road Autonomous Vehicle for DARPA’s Grand Challenge Robert Grabowski, Richard Weatherly, Robert Bolling, David Seidel, Michael Shadid, and Ann Jones. The MITRE Corporation 7525 Colshire Drive McLean VA, 22102 [email protected] Abstract The MITRE Meteor team fielded an autonomous vehicle that competed in DARPA’s 2005 Grand Challenge race. This paper describes the team’s approach to building its robotic vehicle, the vehicle and components that let the vehicle see and act, and the computer software that made the vehicle autonomous. It presents how the team prepared for the race and how their vehicle performed. 1 Introduction In 2004, the Defense Advanced Research Projects Agency (DARPA) challenged developers of autonomous ground vehicles to build machines that could complete a 132-mile, off-road course. Figure 1: The MITRE Meteor starting the finals of the 2005 DARPA Grand Challenge. 2005 Journal of Field Robotics Special Issue on the DARPA Grand Challenge 195 teams applied – only 23 qualified to compete. Qualification included demonstrations to DARPA and a ten-day National Qualifying Event (NQE) in California. The race took place on October 8 and 9, 2005 in the Mojave Desert over a course containing gravel roads, dirt paths, switchbacks, open desert, dry lakebeds, mountain passes, and tunnels. The MITRE Corporation decided to compete in the Grand Challenge in September 2004 by sponsoring the Meteor team. They believed that MITRE’s work programs and military sponsors would benefit from an understanding of the technologies that contribute to the DARPA Grand Challenge. -

Research Highlight
research highlight October 2007 Socio-economic Series 07-013 A Plan for Rainy Days: Water Runoff and Site Planning Introduction In 2004, the City of Stratford (population 30,000) approved a Theoretical secondary plan for a future city expansion area of 155 ha (383 acres), based on an evaluation of three plans, one of which was derived from the CMHC planning model, the Fused Grid.1 The evaluation compared the plans against 16 criteria falling under three overarching concepts of efficiency, quality and environmental impact. Rainwater can be an asset or a liability depending on the approach to dealing with runoff. Since all three plans protected site watercourses and included stormwater management (SWM) ponds as a requirement, the evaluation criteria did not include rainwater runoff impacts. Current research shows that runoff from development can be detrimental to water quality, aquatic life and the maintenance of Figure 1 An experimental site plan layout using medium water resources. New tools for modelling rainwater behaviour and density forms and estate lots. management, such as the Water Balance Model (WBM) for Canada,2 and new approaches for reducing runoff, have been developed and Purpose and Research Approach have begun to be applied. The available land use plans, the need for The study aims to set out the effects of site design approaches, site effective ways to protect watersheds and the new methods of modelling infrastructure methods and site development standards on the potential presented an opportunity to examine in detail what factors influence for reducing or eliminating water runoff from new development. water runoff and to what extent. -

A Survey of Autonomous Driving: Common Practices and Emerging Technologies
Accepted March 22, 2020 Digital Object Identifier 10.1109/ACCESS.2020.2983149 A Survey of Autonomous Driving: Common Practices and Emerging Technologies EKIM YURTSEVER1, (Member, IEEE), JACOB LAMBERT 1, ALEXANDER CARBALLO 1, (Member, IEEE), AND KAZUYA TAKEDA 1, 2, (Senior Member, IEEE) 1Nagoya University, Furo-cho, Nagoya, 464-8603, Japan 2Tier4 Inc. Nagoya, Japan Corresponding author: Ekim Yurtsever (e-mail: [email protected]). ABSTRACT Automated driving systems (ADSs) promise a safe, comfortable and efficient driving experience. However, fatalities involving vehicles equipped with ADSs are on the rise. The full potential of ADSs cannot be realized unless the robustness of state-of-the-art is improved further. This paper discusses unsolved problems and surveys the technical aspect of automated driving. Studies regarding present challenges, high- level system architectures, emerging methodologies and core functions including localization, mapping, perception, planning, and human machine interfaces, were thoroughly reviewed. Furthermore, many state- of-the-art algorithms were implemented and compared on our own platform in a real-world driving setting. The paper concludes with an overview of available datasets and tools for ADS development. INDEX TERMS Autonomous Vehicles, Control, Robotics, Automation, Intelligent Vehicles, Intelligent Transportation Systems I. INTRODUCTION necessary here. CCORDING to a recent technical report by the Eureka Project PROMETHEUS [11] was carried out in A National Highway Traffic Safety Administration Europe between 1987-1995, and it was one of the earliest (NHTSA), 94% of road accidents are caused by human major automated driving studies. The project led to the errors [1]. Against this backdrop, Automated Driving Sys- development of VITA II by Daimler-Benz, which succeeded tems (ADSs) are being developed with the promise of in automatically driving on highways [12]. -

Bpml 30-Nov-77 08:14 42492 This File Is a Combination Ot Two Earlier Files
BPMl 30-Nov-77 08:14 42492 ,NLS DOCUMENTS AND PUBLICATIONS LIST - May 1977 This file is a combination ot two earlier files that included a listing of ARC publl~ations and documents through May 1977. It was compiled by Nina Zolotow. 1 AUGMENTATION RESEARCH CENTER PUBLICATIONS 2 Engelbart, D.C., "Special Considerations of tne Individual as a User, Generator, and RetrieVer of Information," Reprinted from American Documentation, Vol. 12, No.2, APrll, 1961 (XDOC··0585,) 3 Engelbart, D.C., "Augmenting Human Intellect: A Conceptual Framework," Stanford Research Inst1tute, Augmentation Research Center, AFOSR-322J, AD-289 5&5m October 1962 (XDOC--3906 J ) 4 Engelbart, D.C., "A Conceptual Framework for the Augmentation Of Man·s Intellect," VISTAS IN INFORMATION HANDLING, Howerton and Weeds (Editors), spartan BOOkS, Washington, D.C~, 1963, PP. 1-29 (XDOC-·0981,) 5 Engelbart, D.C., Sorenson, P.H., "Explorations in the Automation of Sensorimotor SkIll Tralnlng," stanford Research Institute, MAVTRADEVCEN 1517-1, AD 619 046, January 1965 (XDOC--11736,) 6 Engelbart, D.C., "Augmenting Human Intellect: Experiments, Concepts, and Posslbilltles--Summary Report," Stanford Research Institute, Au~mentatlon Research Center, March 1965 (XDOC--9691,) 7 EngliSh, W.K., Engelbart, D.C., HUddart, B., "Computer Aided DiSPlay Control--Final Report.," Stanford Research Institute, Augmentation Research Center, July 1965 (XDOC--9692,) 8 English, W.K., Engelbart, D.c., Berman, M.A., "DisplaY-Selection Techniques for Text ManiPulation," IEEE TRANSACTIONS ON HUMAN FACTORS IN ELECTRONICS, VOl. HFE~8, No.1, Pp. 5-15, March 1967 (XDOc--9694,) 9 Licklider, J.C.R., Taylor, R.W., Herbert, E., "The Computer as a CommuniCation Device," INTERNATIONAL SCIENCE AND TECHNOLOGY, NO. -

A Hierarchical Control System for Autonomous Driving Towards Urban Challenges
applied sciences Article A Hierarchical Control System for Autonomous Driving towards Urban Challenges Nam Dinh Van , Muhammad Sualeh , Dohyeong Kim and Gon-Woo Kim *,† Intelligent Robotics Laboratory, Department of Control and Robot Engineering, Chungbuk National University, Cheongju-si 28644, Korea; [email protected] (N.D.V.); [email protected] (M.S.); [email protected] (D.K.) * Correspondence: [email protected] † Current Address: Chungdae-ro 1, Seowon-Gu, Cheongju, Chungbuk 28644, Korea. Received: 23 April 2020; Accepted: 18 May 2020; Published: 20 May 2020 Abstract: In recent years, the self-driving car technologies have been developed with many successful stories in both academia and industry. The challenge for autonomous vehicles is the requirement of operating accurately and robustly in the urban environment. This paper focuses on how to efficiently solve the hierarchical control system of a self-driving car into practice. This technique is composed of decision making, local path planning and control. An ego vehicle is navigated by global path planning with the aid of a High Definition map. Firstly, we propose the decision making for motion planning by applying a two-stage Finite State Machine to manipulate mission planning and control states. Furthermore, we implement a real-time hybrid A* algorithm with an occupancy grid map to find an efficient route for obstacle avoidance. Secondly, the local path planning is conducted to generate a safe and comfortable trajectory in unstructured scenarios. Herein, we solve an optimization problem with nonlinear constraints to optimize the sum of jerks for a smooth drive. In addition, controllers are designed by using the pure pursuit algorithm and the scheduled feedforward PI controller for lateral and longitudinal direction, respectively. -

MEMORANDUM Date: July 10, 2009 TG: 08164.00 To: Terry Moore, Econorthwest From: Andrew Mortensen, Transpo Group Cc: Subject: Street and Non-Motorized Connectivity
MEMORANDUM Date: July 10, 2009 TG: 08164.00 To: Terry Moore, ECONorthwest From: Andrew Mortensen, Transpo Group cc: Subject: Street and Non-Motorized Connectivity This memorandum provides context to the subject matter of street and non-motorized system connectivity. It was originally written as a broad summary for application in various transportation planning studies. It has been modified slightly for better summary of concepts critical to the transportation plan and policy subject matter considered in the Motorized and Non-Motorized Travel Reports as part of the Olympia Mobility Strategy project. The memorandum includes four major sections: 1. Introduction 2. Importance of Connectivity 3. Barriers to Connectivity 4. Travel Impacts Associated with Connectivity 5. Implementing Connectivity Introduction In the early 1960’s a federally driven process was initiated to establish the first set of consistent, street functional classification plans for U.S. cities. These plans and policies were updated and revised in the 1970’s as Metropolitan Planning Organizations (MPOs) were formed to assist in regional transportation planning. Most regional and many local roadway and street functional classification policies originated from the FHWA Functional Classification guidelines1. As noted in the FHWA guideline for urban streets and shown in Figure 1, collectors are mapped on an internal, 1-mile grid to essentially provide ½ or 1/3-mile connection between local streets and the perimeter arterials, Figure 1: FHWA Scheme which form the grid boundary. FHWA’s original ‘scheme” does not indicate nor did the underlying policy direction emphasize external continuity of collector and local street connectors beyond the arterial-bound grid. Since the 1960s, and up until the 1990s, many cities have favored a land development pattern and street hierarchical network of poor connectivity, with numerous cul-de-sacs that connect to a few major arterials. -
Fully Convolutional Neural Networks for Dynamic Object Detection in Grid Maps
Fully Convolutional Neural Networks for Dynamic Object Detection in Grid Maps Master’s Thesis of Florian Pierre Joseph Piewak Department of Computer Science Institute for Anthropomatics and FZI Research Center for Information Technology arXiv:1709.03138v1 [cs.CV] 10 Sep 2017 Reviewer: Prof. Dr.–Ing. J. M. Zöllner Second reviewer: Prof. Dr.–Ing. R. Dillmann Advisors: Dipl.–Inform. Michael Weber Dipl.–Ing. Timo Rehfeld Research Period: December 13th, 2015 – June 12th, 2016 KIT – University of the State of Baden-Wuerttemberg and National Research Center of the Helmholtz Association www.kit.edu Fully Convolutional Neural Networks for Dynamic Object Detection in Grid Maps by Florian Pierre Joseph Piewak Master’s Thesis June 2016 Master’s Thesis, FZI Department of Computer Science, 2016 Reviewer: Prof. Dr.–Ing. J. M. Zöllner, Prof. Dr.–Ing. R. Dillmann Department Technical Cognitive Systems FZI Research Center for Information Technology Affirmation Ich versichere wahrheitsgemäß, die Arbeit selbstständig verfasst, alle benutzten Hilfsmittel voll- ständig und genau angegeben und alles kenntlich gemacht zu haben, was aus Arbeiten anderer unverändert oder mit Abänderungen entnommen wurde sowie die Satzung des KIT zur Sicherung guter wissenschaftlicher Praxis in der jeweils gültigen Fassung beachtet zu haben. Sunnyvale, Florian Pierre Joseph Piewak June 2016 iv Abstract One of the most important parts of environment perception is the detection of obstacles in the surrounding of the vehicle. To achieve that, several sensors like radars, LiDARs and cameras are installed in autonomous vehicles. The produced sensor data is fused to a general representation of the surrounding. In this thesis the dynamic occupancy grid map approach of Nuss et al. -

The Implementation of Nls on a Minicomputer by James G
\ \ \ \ \ THE IMPLEMENTATION OF NLS ON A MINICOMPUTER BY JAMES G. MITCHELL CSL 73·3 AUGUST 1973 NIC #18941 This technical report covers the research performed at Xerox Palo Alto Research Center (PARC) for the period June 30, 1972 to July I, 1973 under Contract Number DAHCl5 72 C 0223 with the Advanced Research Projects Agency, Information Processing Techniques Office. The research covers initial studies and evaluation of transferring a large, display-oriented documentation system (the NLS system developed at Stanford Research Institute) to a minicomputer system and a protocol for accessing NLS over the ARPANET. The research reported herein was supported by the Advanced Research Projects Agency under Contract No. DAHCI5 72 C 0223, ARPA Order No. 2151, Program Code No. 2PIO. The views and conclusions contained in this document are those of the authors and should not be interpreted as necessarily representing the official policies, either expressed or implied, of the Advanced Research Projects Agency or the U.S. Government. XEROX PALO ALTO RESEARCH CENTER 3180 PORTER DRIVE/PALO ALTO/CALIFORNIA 94304 Xerox Palo Alto Research Center (PARC): PARC is a research facility of the Xerox Corporation. It is involved in research in the physical sciences, computer hardware and software systems and the computer sciences in general. These latter include computer architecture, interactive graphics, operating systems, programming research, and natural language understanding systems. The Computer Science Laboratory (CSL) of PARe currently numbers thirty technical and support staff. INTRODUCTION The ARPA contract reported herein concerns the development of an NLS-I ike [I] display-oriented text-editing system supporting multiple users on a minicomputer configuration. -

Self-Driving Car Using Artificial Intelligence Prof
International Journal of Future Generation Communication and Networking Vol. 13, No. 3s, (2020), pp. 612–615 Self-Driving Car Using Artificial Intelligence Prof. S.R. Wategaonkar #1, Sujoy Bhattacharya*2, Shubham Bhitre*3 Prem Kumar Singh *4, Khushboo Bedse *5 #Professor and Project Faculty member, Department of Electronic and Telecommunication, Bharati Vidyapeeth’s College of Engineering, Navi Mumbai, Maharashtra, India. *Project Student, Department of Electronic and Telecommunication, Bharati Vidyapeeth’s College of Engineering, Navi Mumbai, Maharashtra, India. [email protected] [email protected] [email protected] [email protected] [email protected] Abstract Self-driving cars have the prospective to transform urban mobility by providing safe, convenient and congestion free transportability. This autonomous vehicle as an application of Artificial Intelligence (AI) have several difficulties like traffic light detection, lane end detection, pedestrian, signs etc. This problem can be overcome by using technologies such as Machine Learning (ML), Deep Learning (DL) and Image Processing. In this paper, author’s propose deep neural network for lane and traffic light detection. The model is trained and assessed using the dataset, which contains the front view image frames and the steering angle data captured when driving on the road. Keeping cars inside the lane is a very important feature of self-driving cars. It learns how to keep the vehicle in lane from human driving data. The paper presents Artificial Intelligence based autonomous navigation and obstacle avoidance of self-driving cars, applied with Deep Learning to a simulated cars in an urban environment. Keywords—Self-Driving car, Autonomous driving, Object Detection, Lane End Detection, Deep Learning, Traffic light Detection. -

The People Who Invented the Internet Source: Wikipedia's History of the Internet
The People Who Invented the Internet Source: Wikipedia's History of the Internet PDF generated using the open source mwlib toolkit. See http://code.pediapress.com/ for more information. PDF generated at: Sat, 22 Sep 2012 02:49:54 UTC Contents Articles History of the Internet 1 Barry Appelman 26 Paul Baran 28 Vint Cerf 33 Danny Cohen (engineer) 41 David D. Clark 44 Steve Crocker 45 Donald Davies 47 Douglas Engelbart 49 Charles M. Herzfeld 56 Internet Engineering Task Force 58 Bob Kahn 61 Peter T. Kirstein 65 Leonard Kleinrock 66 John Klensin 70 J. C. R. Licklider 71 Jon Postel 77 Louis Pouzin 80 Lawrence Roberts (scientist) 81 John Romkey 84 Ivan Sutherland 85 Robert Taylor (computer scientist) 89 Ray Tomlinson 92 Oleg Vishnepolsky 94 Phil Zimmermann 96 References Article Sources and Contributors 99 Image Sources, Licenses and Contributors 102 Article Licenses License 103 History of the Internet 1 History of the Internet The history of the Internet began with the development of electronic computers in the 1950s. This began with point-to-point communication between mainframe computers and terminals, expanded to point-to-point connections between computers and then early research into packet switching. Packet switched networks such as ARPANET, Mark I at NPL in the UK, CYCLADES, Merit Network, Tymnet, and Telenet, were developed in the late 1960s and early 1970s using a variety of protocols. The ARPANET in particular led to the development of protocols for internetworking, where multiple separate networks could be joined together into a network of networks. In 1982 the Internet Protocol Suite (TCP/IP) was standardized and the concept of a world-wide network of fully interconnected TCP/IP networks called the Internet was introduced. -

UC Berkeley Previously Published Works
UC Berkeley UC Berkeley Previously Published Works Title Building the Second Mind, 1961-1980: From the Ascendancy of ARPA-IPTO to the Advent of Commercial Expert Systems Permalink https://escholarship.org/uc/item/7ck3q4f0 ISBN 978-0-989453-4-6 Author Skinner, Rebecca Elizabeth Publication Date 2013-12-31 eScholarship.org Powered by the California Digital Library University of California Building the Second Mind, 1961-1980: From the Ascendancy of ARPA to the Advent of Commercial Expert Systems copyright 2013 Rebecca E. Skinner ISBN 978 09894543-4-6 Forward Part I. Introduction Preface Chapter 1. Introduction: The Status Quo of AI in 1961 Part II. Twin Bolts of Lightning Chapter 2. The Integrated Circuit Chapter 3. The Advanced Research Projects Agency and the Foundation of the IPTO Chapter 4. Hardware, Systems and Applications in the 1960s Part II. The Belle Epoque of the 1960s Chapter 5. MIT: Work in AI in the Early and Mid-1960s Chapter 6. CMU: From the General Problem Solver to the Physical Symbol System and Production Systems Chapter 7. Stanford University and SRI Part III. The Challenges of 1970 Chapter 8. The Mansfield Amendment, “The Heilmeier Era”, and the Crisis in Research Funding Chapter 9. The AI Culture Wars: the War Inside AI and Academia Chapter 10. The AI Culture Wars: Popular Culture Part IV. Big Ideas and Hardware Improvements in the 1970s invert these and put the hardware chapter first Chapter 11. AI at MIT in the 1970s: The Semantic Fallout of NLR and Vision Chapter 12. Hardware, Software, and Applications in the 1970s Chapter 13.