Message Passing Optimization of Harmonic Influence Centrality
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-
Learning on Hypergraphs: Spectral Theory and Clustering
Learning on Hypergraphs: Spectral Theory and Clustering Pan Li, Olgica Milenkovic Coordinated Science Laboratory University of Illinois at Urbana-Champaign March 12, 2019 Learning on Graphs Graphs are indispensable mathematical data models capturing pairwise interactions: k-nn network social network publication network Important learning on graphs problems: clustering (community detection), semi-supervised/active learning, representation learning (graph embedding) etc. Beyond Pairwise Relations A graph models pairwise relations. Recent work has shown that high-order relations can be significantly more informative: Examples include: Understanding the organization of networks (Benson, Gleich and Leskovec'16) Determining the topological connectivity between data points (Zhou, Huang, Sch}olkopf'07). Graphs with high-order relations can be modeled as hypergraphs (formally defined later). Meta-graphs, meta-paths in heterogeneous information networks. Algorithmic methods for analyzing high-order relations and learning problems are still under development. Beyond Pairwise Relations Functional units in social and biological networks. High-order network motifs: Motif (Benson’16) Microfauna Pelagic fishes Crabs & Benthic fishes Macroinvertebrates Algorithmic methods for analyzing high-order relations and learning problems are still under development. Beyond Pairwise Relations Functional units in social and biological networks. Meta-graphs, meta-paths in heterogeneous information networks. (Zhou, Yu, Han'11) Beyond Pairwise Relations Functional units in social and biological networks. Meta-graphs, meta-paths in heterogeneous information networks. Algorithmic methods for analyzing high-order relations and learning problems are still under development. Review of Graph Clustering: Notation and Terminology Graph Clustering Task: Cluster the vertices that are \densely" connected by edges. Graph Partitioning and Conductance A (weighted) graph G = (V ; E; w): for e 2 E, we is the weight. -

Multiplex Conductance and Gossip Based Information Spreading in Multiplex Networks
1 Multiplex Conductance and Gossip Based Information Spreading in Multiplex Networks Yufan Huang, Student Member, IEEE, and Huaiyu Dai, Fellow, IEEE Abstract—In this network era, not only people are connected, different networks are also coupled through various interconnections. This kind of network of networks, or multilayer networks, has attracted research interest recently, and many beneficial features have been discovered. However, quantitative study of information spreading in such networks is essentially lacking. Despite some existing results in single networks, the layer heterogeneity and complicated interconnections among the layers make the study of information spreading in this type of networks challenging. In this work, we study the information spreading time in multiplex networks, adopting the gossip (random-walk) based information spreading model. A new metric called multiplex conductance is defined based on the multiplex network structure and used to quantify the information spreading time in a general multiplex network in the idealized setting. Multiplex conductance is then evaluated for some interesting multiplex networks to facilitate understanding in this new area. Finally, the tradeoff between the information spreading efficiency improvement and the layer cost is examined to explain the user’s social behavior and motivate effective multiplex network designs. Index Terms—Information spreading, multiplex networks, gossip algorithm, multiplex conductance F 1 INTRODUCTION N the election year, one of the most important tasks Arguably, this somewhat simplified version of multilayer I for presidential candidates is to disseminate their words networks already captures many interesting multi-scale and and opinions to voters in a fast and efficient manner. multi-component features, and serves as a good starting The underlying research problem on information spreading point for our intended study. -

Rumour Spreading and Graph Conductance∗
Rumour spreading and graph conductance∗ Flavio Chierichetti, Silvio Lattanzi, Alessandro Panconesi fchierichetti,lattanzi,[email protected] Dipartimento di Informatica Sapienza Universit`adi Roma October 12, 2009 Abstract if its completion time is poly-logarithmic in the size of We show that if a connected graph with n nodes has the network regardless of the source, and that it is slow conductance φ then rumour spreading, also known as otherwise. randomized broadcast, successfully broadcasts a mes- Randomized broadcast has been intensely investi- sage within O(log4 n/φ6) many steps, with high proba- gated (see the related-work section). Our long term bility, using the PUSH-PULL strategy. An interesting goal is to characterize a set of necessary and/or suffi- feature of our approach is that it draws a connection be- cient conditions for rumour spreading to be fast in a tween rumour spreading and the spectral sparsification given network. In this work, we provide a very general procedure of Spielman and Teng [23]. sufficient condition{ high conductance. Our main moti- vation comes from the study of social networks. Loosely 1 Introduction stated, we are looking after a theorem of the form \Ru- mour spreading is fast in social networks". Our result is Rumour spreading, also known as randomized broadcast a good step in this direction because there are reasons or randomized gossip (all terms that will be used as to believe that social networks have high conductance. synonyms throughout the paper), refers to the following This is certainly the case for preferential attachment distributed algorithm. Starting with one source node models such as that of [18]. -

Absorbing State 34, 36 Adaptive Boolean Networks 78 Adaptive Chemical Network 73 Adaptive Coupled Map Lattices 66 Adaptive Epide
239 Index a b absorbing state 34, 36 b-value 107, 109, 112, 119 adaptive Boolean networks 78 Bak–Sneppen model 74, 75 adaptive chemical network 73 benchmark 216, 217, 234 adaptive coupled map lattices 66 Bethe–Peierls approach 225 adaptive epidemiological network betweenness of a node 68 95 bill-tracking website 6 adaptive network of coupled biodiversity 46 oscillators 83 biological evolution 73 adaptive networks 63–66, 70–72, bipartite networks 211 74, 83, 90, 98, 100, 102 bipartite structure 216 adaptive rewiring 91, 92 bipartition 218, 220 adaptive SIS model 96 bipartitioning problem 219 adjacency matrix 9, 66, 206, 207, birth-death processes 31, 37 209–211, 217, 223 bisection problem 232 aftershock 108, 113, 121, bistability 27 125–129, 131, 134, 135, 137 bivariate analysis 164 aftershock magnitudes 127 bivariate measures 162 aftershock sequence 121, 123 bivariate nonlinear approaches aftershock sequences 136 163 agent-based models 73 bivariate time-series analysis agent-based simulation 172, 173, 178 frameworks 3 block-structure 201, 203, 217, air transportation network 2, 10 222, 234, 235 anti-epileptic drugs 159, 163 Boolean networks 65, 76, 79 assortative 67 bounded rationality 25 attractor 164 box-counting technique 112, 113 autoregressive modeling 161, brain 161 172, 175 Brownian motion 6, 7 avalanche size 139 burst-firing 169, 170 average shortest path length 167 bursting 166, 167, 170 Reviews of Nonlinear Dynamics and Complexity. Edited by Heinz Georg Schuster Copyright c 2009 WILEY-VCH Verlag GmbH & Co. KGaA, Weinheim ISBN: -

Random Boolean Networks As a Toy Model for the Brain
UNIVERSITY OF GENEVA SCIENCE FACULTY VRIJE UNIVERSITEIT OF AMSTERDAM PHYSICS SECTION Random Boolean Networks as a toy model for the brain MASTER THESIS presented at the science faculty of the University of Geneva for obtaining the Master in Theoretical Physics by Chlo´eB´eguin Supervisor (VU): Pr. Greg J Stephens Co-Supervisor (UNIGE): Pr. J´er^ome Kasparian July 2017 Contents Introduction1 1 Biology, physics and the brain4 1.1 Biological description of the brain................4 1.2 Criticality in the brain......................8 1.2.1 Physics reminder..................... 10 1.2.2 Experimental evidences.................. 15 2 Models of neural networks 20 2.1 Classes of models......................... 21 2.1.1 Spiking models...................... 21 2.1.2 Rate-based models.................... 23 2.1.3 Attractor networks.................... 24 2.1.4 Links between the classes of models........... 25 2.2 Random Boolean Networks.................... 28 2.2.1 General definition..................... 28 2.2.2 Kauffman network.................... 30 2.2.3 Hopfield network..................... 31 2.2.4 Towards a RBN for the brain.............. 32 2.2.5 The model......................... 33 3 Characterisation of RBNs 34 3.1 Attractors............................. 34 3.2 Damage spreading........................ 36 3.3 Canonical specific heat...................... 37 4 Results 40 4.1 One population with Gaussian weights............. 40 4.2 Dale's principle and balance of inhibition - excitation..... 46 4.3 Lognormal distribution of the weights.............. 51 4.4 Discussion............................. 55 i 5 Conclusion 58 Bibliography 60 Acknowledgements 66 A Python Code 67 A.1 Dynamics............................. 67 A.2 Attractor search.......................... 69 A.3 Hamming Distance........................ 73 A.4 Canonical specific heat..................... -

Boolean Analysis of MOS Circuits
Bo olean Analysis of MOS Circuits Randal E Bryant Computer Science Department CarnegieMellon University Pittsburgh PA February Abstract The switchlevel mo del represents a digital metaloxide semiconductor MOS cir cuit as a network of charge storage no des connected by resistive transistor switches The functionality of such a network can b e expressed as a series of systems of Bo olean equations Solving these equations symb olically yields a set of Bo olean formulas that describ e the mapping from input and current state to the new network state This analysis supp orts the same class of networks as the switchlevel simulator MOSSIM I I and provides the same functionality including the handling of bidirectional eects and indeterminate X logic values In the worst case the analysis of an n no de network can yield a set of formulas containing a total of O n op erations However all but a limited set of dense passtransistor networks give formulas with O n total op era tions The analysis can serve as the basis of ecient programs for a varietyoflogic design tasks including logic simulation on b oth conventional and sp ecial purp ose computers fault simulation test generation and symb olic verication Keywords and phrases switchlevel networks symb olic analysis logic simulation fault simulation simulation accelerators Intro duction The switchlevel mo del has proved successful as an abstract representation of digital metaloxide semiconductor MOS circuits for a variety of applications This mo del repre sents a circuit in terms of its exact transistor -

Percolation Theory Are Well-Suited To
Models of Disordered Media and Predictions of Associated Hydraulic Conductivity A thesis submitted in partial fulfillment of the requirements for the degree of Master of Science By L AARON BLANK B.S., Wright State University, 2004 2006 Wright State University WRIGHT STATE UNIVERSITY SCHOOL OF GRADUATE STUDIES Novermber 6, 2006 I HEREBY RECOMMEND THAT THE THESIS PREPARED UNDER MY SUPERVISION BY L Blank ENTITLED Models of Disordered Media and Predictions of Associated Hydraulic Conductivity BE ACCEPTED IN PARTIAL FULFILLMENT OF THE REQUIREMENTS FOR THE DEGREE OF Master of Science. _______________________ Allen Hunt, Ph.D. Thesis Advisor _______________________ Lok Lew Yan Voon, Ph.D. Department Chair _______________________ Joseph F. Thomas, Jr., Ph.D. Dean of the School of Graduate Studies Committee on Final Examination ____________________ Allen Hunt, Ph.D. ____________________ Brent D. Foy, Ph.D. ____________________ Gust Bambakidis, Ph.D. ____________________ Thomas Skinner, Ph.D. Abstract In the late 20th century there was a spill of Technetium in eastern Washington State at the US Department of Energy Hanford site. Resulting contamination of water supplies would raise serious health issues for local residents. Therefore, the ability to predict how these contaminants move through the soil is of great interest. The main contribution to contaminant transport arises from being carried along by flowing water. An important control on the movement of the water through the medium is the hydraulic conductivity, K, which defines the ease of water flow for a given pressure difference (analogous to the electrical conductivity). The overall goal of research in this area is to develop a technique which accurately predicts the hydraulic conductivity as well as its distribution, both in the horizontal and the vertical directions, for media representative of the Hanford subsurface. -

Submodular Hypergraphs: P-Laplacians, Cheeger Inequalities and Spectral Clustering
Submodular Hypergraphs: p-Laplacians, Cheeger Inequalities and Spectral Clustering Pan Li 1 Olgica Milenkovic 1 Abstract approximations have been based on the assumption that each hyperedge cut has the same weight, in which case the We introduce submodular hypergraphs, a family underlying hypergraph is termed homogeneous. of hypergraphs that have different submodular weights associated with different cuts of hyper- However, in image segmentation, MAP inference on edges. Submodular hypergraphs arise in cluster- Markov random fields (Arora et al., 2012; Shanu et al., ing applications in which higher-order structures 2016), network motif studies (Li & Milenkovic, 2017; Ben- carry relevant information. For such hypergraphs, son et al., 2016; Tsourakakis et al., 2017) and rank learn- we define the notion of p-Laplacians and derive ing (Li & Milenkovic, 2017), higher order relations between corresponding nodal domain theorems and k-way vertices captured by hypergraphs are typically associated Cheeger inequalities. We conclude with the de- with different cut weights. In (Li & Milenkovic, 2017), Li scription of algorithms for computing the spectra and Milenkovic generalized the notion of hyperedge cut of 1- and 2-Laplacians that constitute the basis of weights by assuming that different hyperedge cuts have new spectral hypergraph clustering methods. different weights, and that consequently, each hyperedge is associated with a vector of weights rather than a single scalar weight. If the weights of the hyperedge cuts are sub- 1. Introduction modular, then one can use a graph with nonnegative edge Spectral clustering algorithms are designed to solve a relax- weights to efficiently approximate the hypergraph, provided ation of the graph cut problem based on graph Laplacians that the largest size of a hyperedge is a relatively small con- that capture pairwise dependencies between vertices, and stant. -

Artificial Neural Networks Based on Memristive Devices
SCIENCE CHINA Information Sciences . REVIEW . June 2018, Vol. 61 060423:1–060423:14 https://doi.org/10.1007/s11432-018-9425-1 Special Focus on Memristive Devices and Neuromorphic Computing Artificial neural networks based on memristive devices Vignesh RAVICHANDRAN, Can LI, Ali BANAGOZAR, J. Joshua YANG & Qiangfei XIA* Department of Electrical and Computer Engineering, University of Massachusetts, Amherst MA 01003, USA Received 22 February 2018/Accepted 27 March 2018/Published online 15 May 2018 Abstract The advent of memristive devices and the continuing research and development in the field of neuromorphic computing show great potential as an alternative to traditional von Neumann computing and bring us ever closer to realizing a true “thinking machine”. Novel neural network architectures and algo- rithms inspired by the brain are becoming more and more attractive to keep up with computing needs, relying on intrinsic parallelism and reduced power consumption to outperform more conventional comput- ing methods. This article provides an overview of various neural networks with an emphasis on networks based on memristive emerging devices, with the advantages of memristor neural networks compared with pure complementary metal oxide semiconductor (CMOS) implementations. A general description of neural networks is presented, followed by a survey of prominent CMOS networks, and finally networks implemented using emerging memristive devices are discussed, along with the motivation for developing memristor based networks and the computational potential -
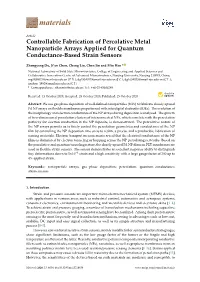
Controllable Fabrication of Percolative Metal Nanoparticle Arrays Applied for Quantum Conductance-Based Strain Sensors
materials Article Controllable Fabrication of Percolative Metal Nanoparticle Arrays Applied for Quantum Conductance-Based Strain Sensors Zhengyang Du, Ji’an Chen, Chang Liu, Chen Jin and Min Han * National Laboratory of Solid State Microstructures, College of Engineering and Applied Sciences and Collaborative Innovation Centre of Advanced Microstructures, Nanjing University, Nanjing 210093, China; [email protected] (Z.D.); [email protected] (J.C.); [email protected] (C.L.); [email protected] (C.J.) * Correspondence: [email protected]; Tel.: +86-25-83686248 Received: 13 October 2020; Accepted: 28 October 2020; Published: 29 October 2020 Abstract: We use gas phase deposition of well-defined nanoparticles (NPs) to fabricate closely-spaced Pd NP arrays on flexible membranes prepatterned with interdigital electrodes (IDEs). The evolution of the morphology and electron conductance of the NP arrays during deposition is analyzed. The growth of two-dimensional percolation clusters of interconnected NPs, which correlate with the percolation pathway for electron conduction in the NP deposits, is demonstrated. The percolative nature of the NP arrays permits us to finely control the percolation geometries and conductance of the NP film by controlling the NP deposition time so as to realize a precise and reproducible fabrication of sensing materials. Electron transport measurements reveal that the electrical conductance of the NP films is dominated by electron tunneling or hopping across the NP percolating networks. Based on the percolative and quantum tunneling nature, the closely-spaced Pd NP films on PET membranes are used as flexible strain sensors. The sensor demonstrates an excellent response ability to distinguish tiny deformations down to 5 10 4 strain and a high sensitivity with a large gauge factor of 200 up to × − 4% applied strain. -

Approximating Graph Conductance: from Global to Local
APPROXIMATING GRAPH CONDUCTANCE: FROM GLOBAL TO LOCAL YUEHENG ZHANG Abstract. In this expository paper, we introduce spectral algorithms and random walk based algorithms on graphs through the problem of finding sparse cuts in both global and local settings. First, we consider the global problem of finding a set with minimum conductance, and show how the Laplacian and normalized Laplacian matrices arise naturally when we relax this problem to an eigenvalue computation problem. Then we bound the relaxed quantity, completing a spectral approximation algorithm and a proof of Cheeger's in- equality. Next, we discuss limitations of this global algorithm and motivate the problem of finding local conductance, for which we introduce random walks on graphs. We discuss how to gain information about conductance from the con- vergence of random walks, and motivate convergence bounds related to local conductance. Finally, we briefly introduce algorithms utilizing such bounds. Throughout, we place an emphasis on providing motivation and explanations from an algorithmic point of view. Contents 1. Introduction 1 1.1. Notation and general definitions 3 1.2. Conductance of cuts and of a graph 4 2. Generalized Rayleigh quotient and variational characterization of eigenvalues 5 3. Spectral approximation of the conductance of a graph 7 3.1. Relaxing the problem of finding the conductance of a graph 7 3.1.1. Cut capacity and the Laplacian 7 3.1.2. Normalized Laplacian and the easy side of Cheeger 9 3.2. Lower bounding the relaxation and the hard side of Cheeger 11 4. Local low-conductance sets and random walks on a graph 15 4.1. -

Graph Clustering Outline
Graph Clustering Outline • Min s-t cut problem • Min cut problem • Multiway cut • Minimum k-cut • Other normalized cuts and spectral graph partitionings Min s-t cut • Weighted graph G(V,E) • An s-t cut C = (S,T) of a graph G = (V, E) is a cut partition of V into S and T such that s∈S and t∈T • Cost of a cut: Cost(C) = Σe(u,v) uЄS, v ЄT w(e) • Problem: Given G, s and t find the minimum cost s-t cut Max flow problem • Flow network – Abstraction for material flowing through the edges – G = (V,E) directed graph with no parallel edges – Two distinguished nodes: s = source, t= sink – c(e) = capacity of edge e Cuts • An s-t cut is a partition (S,T) of V with sЄS and tЄT • capacity of a cut (S,T) is cap(S,T) = Σe out of Sc(e) • Find s-t cut with the minimum capacity: this problem can be solved optimally in polynomial time by using flow techniques Flows • An s-t flow is a function that satisfies – For each eЄE 0≤f(e) ≤c(e) [capacity] – For each vЄV-{s,t}: Σe in to vf(e) = Σe out of vf(e) [conservation] • The value of a flow f is: v(f) = Σe out of s f(e) Max flow problem • Find s-t flow of maximum value Flows and cuts • Flow value lemma: Let f be any flow and let (S,T) be any s-t cut. Then, the net flow sent across the cut is equal to the amount leaving s Σe out of S f(e) – Σe in to S f(e) = v(f) Flows and cuts • Weak duality: Let f be any flow and let (S,T) be any s-t cut.