LINEAR INDUCTION MOTORS J in TRANSPORTATION
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-
Investigation, Analysis and Design of the Linear Brushless Doubly-Fed
AN ABSTRACT OF THE THESIS OF Farroh Seifkhani for the degree of Master of Science in Electrical and Computer Engineering presented on February 8, 1991 . Title: Investigation, Analysis and Design of the Linear Brush less Doubly-Fed Machine.Redacted for Privacy Abstract approved: K. Wallace This thesis covers theefforts of thedesign, analysis, characteristics, and construction of a Linear Brush less Doubly-Fed Machine (LBDFM), as well as the results of the investigations and comparison with its actual prototype. In recent years, attempts to develop new means of high-speed, efficient transportation have led to considerable world-wide interest in high-speed trains. This concern has generated interests in the linear induction motor which has been considered as one of the more appropriate propulsion systems for Super-High-Speed Trains (SHST). Research and experiments on linear induction motors arebeing actively pursued in a number of countries. Linear induction motors are generally applicable for the production of motion in a straight line, eliminating the need for gears and other mechanisms for conversion of rotational motion to linear motion. The idea of investigation and construction of the linear brushless doubly-fed motor was first propounded at Oregon State University, because of potential applications as Variable-Speed Transportation (VST) system. The perceived advantages of a LBDFM over other LIM's are significant reduction of cost and maintenance requirements. The cost of this machine itself is expected to be similar to that of a conventionalLIM. However, it is believed that the rating of the power converter required for control of the traveling magnetic wave in the air gap is a fraction of the machine rating. -

Lyall Cooper Dr. Dann ASR – D Block 10 May 2012 the Mighty Railgun I. Abstract the Idea of This Project Is to Build a Railgun
Lyall Cooper Dr. Dann ASR – D Block 10 May 2012 The Mighty Railgun (All Bark no Bite) I. Abstract The idea of this project is to build a railgun capable of firing a small metal projectile at substantial velocity. The original plan was to build iterative prototypes capable of firing small projectiles, and using them to figure out the ideal design for the final version, but the smaller versions were not very successful due to their relative lack of power, so it was difficult to use them to learn what to do. The final, largest scale railgun is powered by a bank of capacitors with an equivalent capacitance of 24.6mF charged to around 350V. This produces 3013.5J of energy discharged over approximately 58.75 µs (it varies for each firing), drawing a peak of about 1425A when firing a projectile (it once again varies) and about 1600A when not firing a projectile (short circuiting the rails). The railgun is capable of consistently firing a small piece of metal (usually aluminum or copper); however the projectile does not usually travel very far, although this is hard to measure due to the nature of the gun and the speed at which the firing takes place. II. Introduction Electricity is often seemingly mysterious, but we have come to accept and understand how through the interaction of electric and magnetic fields we can create a simple motor, as we did in the first semester. A railgun is just a linear electric motor, at very high speeds. What makes it different, however, is that it uses neither magnets nor coils of wire, and relies entirely on the induced magnetic field in the rails due to the extremely large current to produce a Lorentz Force to propel the projectile (which will be discussed in greater depth in the theory section). -
A BRIEF INTRODUCTION to TUBULAR LINEAR MOTORS Linear Motors Provide Direct Thrust for Positioning a Payload, Eliminating the Need for Rotary-To-Linear Conversion
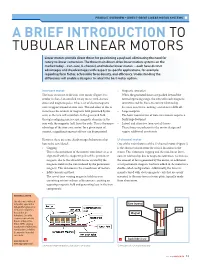
PRODUCT OVERVIEW – DIRECT-DRIVE LINEAR MOTOR SYSTEMS A BRIEF INTRODUCTION TO TUBULAR LINEAR MOTORS Linear motors provide direct thrust for positioning a payload, eliminating the need for rotary-to-linear conversion. The three main direct-drive linear motion systems on the market today – iron-core, U-channel, and tubular linear motors – each have distinct advantages and disadvantages with respect to specific applications, for example regarding form factor, achievable force density, and efficiency. Understanding the differences will enable a designer to select the best motor option. Iron-core motor • Magnetic saturation The basic structure of the iron-core motor (Figure 1) is When the generated forces are pushed beyond the similar to that of an unrolled rotary motor with discrete normal operating range, the iron will reach magnetic stator and magnetic poles. It has a set of electromagnetic saturation and the force-to-current relationship coils wrapped around an iron core. The end effect of this is becomes non-linear, making control more difficult. to increase the amount of magnetic field generated by the • Large footprint coils, as the iron will contribute to the generated field The basic construction of iron-core motors requires a through realigning microscopic magnetic domains in the fairly large footprint. iron with the magnetic field from the coils. This is the major • Lateral and attractive (non-useful) forces advantage of the iron-core motor: for a given input of These forces are inherent to the motor design and current, a significant amount of force can be generated. require additional constraints. However, there are some disadvantages/behaviours that U-channel motor have to be considered: One of the main features of the U-channel motor (Figure 2) • Cogging is the absence of iron from the critical locations in the This is the movement of the motor’s iron forcer so as to motor. -

High Speed Linear Induction Motor Efficiency Optimization
Calhoun: The NPS Institutional Archive Theses and Dissertations Thesis Collection 2005-06 High speed linear induction motor efficiency optimization Johnson, Andrew P. (Andrew Peter) http://hdl.handle.net/10945/11052 High Speed Linear Induction Motor Efficiency Optimization by Andrew P. Johnson B.S. Electrical Engineering SUNY Buffalo, 1994 Submitted to the Department of Ocean Engineering and the Department of Electrical Engineering and Computer Science in Partial Fulfillment of the Requirements for the Degree of Naval Engineer and Master of Science in Electrical Engineering and Computer Science at the Massachusetts Institute of Technology June 2005 ©Andrew P. Johnson, all rights reserved. MIT hereby grants the U.S. Government permission to reproduce and to distribute publicly paper and electronic copies of this thesis document in whole or in part. Signature of A uthor ................ ............................... D.epartment of Ocean Engineering May 7, 2005 Certified by. ..... ........James .... ... ....... ... L. Kirtley, Jr. Professor of Electrical Engineering // Thesis Supervisor Certified by......................•........... ...... ........................S•:• Timothy J. McCoy ssoci t Professor of Naval Construction and Engineering Thesis Reader Accepted by ................................................. Michael S. Triantafyllou /,--...- Chai -ommittee on Graduate Students - Depa fnO' cean Engineering Accepted by . .......... .... .....-............ .............. Arthur C. Smith Chairman, Committee on Graduate Students DISTRIBUTION -

An Introductory Electric Motors and Generators Experiment for a Sophomore Level Circuits Course
AC 2008-310: AN INTRODUCTORY ELECTRIC MOTORS AND GENERATORS EXPERIMENT FOR A SOPHOMORE-LEVEL CIRCUITS COURSE Thomas Schubert, University of San Diego Thomas F. Schubert, Jr. received his B.S., M.S., and Ph.D. degrees in electrical engineering from the University of California, Irvine, Irvine CA in 1968, 1969 and 1972 respectively. He is currently a Professor of electrical engineering at the University of San Diego, San Diego, CA and came there as a founding member of the engineering faculty in 1987. He previously served on the electrical engineering faculty at the University of Portland, Portland OR and Portland State University, Portland OR and on the engineering staff at Hughes Aircraft Company, Los Angeles, CA. Prof. Schubert is a member of IEEE and ASEE and is a registered professional engineer in Oregon. He currently serves as the faculty advisor for the Kappa Eta chapter of Eta Kappa Nu at the University of San Diego. Frank Jacobitz, University of San Diego Frank G. Jacobitz was born in Göttingen, Germany in 1968. He received his Diploma in physics from the Georg-August Universität, Göttingen, Germany in 1993, as well as M.S. and Ph.D. degrees in mechanical engineering from the University of California, San Diego, La Jolla, CA in 1995 and 1998, respectively. He is currently an Associate Professor of mechanical engineering at the University of San Diego, San Diego, CA since 2003. From 1998 to 2003, he was an Assistant Professor of mechanical engineering at the University of California, Riverside, Riverside, CA. He has also been a visitor with the Centre National de la Recherche Scientifique at the Université de Provence (Aix-Marseille I), France. -

ELECTRICAL ENERGY UTLISATION Jacek F
ELECTRICAL ENERGY UTLISATION Jacek F. Gieras and Izabella A. Gieras Adam Marszalek Publishing House, Torun, 1998 This text evolved from notes used in teaching an undergraduate course Energy Utilisation at the University of Cape Town. As the curricula of electrical engineering programmes became more and more overcrowded, many electrical engineering departments decided to limit the number of compulsory courses in heavy current electrical engineering. As a result, the number of lectures in electrical machines and related subjects have been reduced. Under such circumstances students need a concise textbook which covers electrical motors with emphasis on their performance, selection and applications, characteristics of modern electrical drives including variable speed drives and the use of electrical energy in households. This textbook deals with fundamentals of electrical motors, drives, electrical traction and domestic use of electrical energy. It is intended to serve second or third year students taking a one-semester course in energy utilisation or electric power engineering. Transformers and electromechanical generators have been omitted as transformation and generation of electric power is usually covered by a parallel course in power systems. The textbook consists of seven chapters: 1. Energy and drives, 2. D.c. motors, 3. Three- phase induction motors, 4. Synchronous motors, 5. Variable-speed drives, 6. Electrical traction and 7. Domestic use of electrical energy. Chapter 7 also contains principles of illumination. For a one semester course and two lectures per week the authors recommend the first four chapters. For four lectures per week the authors recommend all seven chapters. Students using this textbook should have taken courses in circuit theory and electromagnetism as prerequisites. -

Industrial Linear Motors
Industrial Linear Motors Smart solutions are driven by PRODUCT OVERVIEW www.linmot.com Precision and dynamics In the products and in the everyday life of NTI AG, these values are inseparable. NTI AG NTI AG is a global manufacturer of high quality tubular style linear motors and linear motor systems and thus focuses on the development, production and distribution of linear direct drives for use in industrial environments. Founded in 1993 as an independent business unit of the Sulzer Group, NTI AG has been in operation since 2000 as an independent company. NTI AG headquarters are located in Spreitenbach, near Zurich in Switzerland. In addition to three production sites in Switzerland and Slovakia, NTI AG maintains a sales and support office LinMot® USA Inc. to cover the Americas. Mission The brands LinMot® for industrial linear motors and MagSpring® for magnetic springs are offered LinMot offers its customers a sophisticated and dedicated linear to customers worldwide. NTI AG drive system that can be easily integrated into all leading control maintains an experienced customer systems. A high degree of standardization, delivery from stock and consultant sales and support a worldwide distribution network insure the immediate availability network of over 80 locations and excellent customer support. worldwide. For the realization of linear motion Our aim is to push linear direct drive technology and make it a NTI AG is always a competent and standard machine design element. We offer highly efficient drive reliable partner. solutions that make a major contribution to the overall resource conservation effort. 2 3 Linear Motors Position and Temperature sensors Electronic nameplate Stator Winding Slider with Neodynium Magnets Payload Mounting LinMot linear motors employ a direct electromagnetic principle. -

Methods for Improving Efficiency of Linear Induction Motor for Urban
512 Methods for Improving Efficiency of Linear Induction Motor for Urban Transit∗ Nobuo FUJII∗∗, Toshiyuki HOSHI∗∗ and Yuichi TANABE∗∗ To improve the efficiency of the linear induction motors (LIMs) for transportation, the compensation of end effect for LIM with the restriction of length and the long LIM with small end effect essentially are discussed respectively. Based on the proposed concept, the com- pensation method of the magnet rotator type and AC coil type of compensators are developed respectively. The utility is not yet confirmed. As for the long LIM with length of 10 m, the analysis shows that the efficiencies are about 85% at 40 km/h and above 90% at 360 km/h respectively. Key Words: Linear Motor, Linear Induction Motor, LIM, Linear Drives, Transportation, Traction, Subway, Electromagnetic Analysis, End Effect, Compensator length of LIM, the compensation of end effect is the only 1. Introduction method for remarkable improve of the characteristics. The In a part of new type transit, linear induction motors compensating winding method was proposed previous- (1) ff (LIMs) have been used as a direct electromagnetic drive ly , but it was not e ective. The authors have proposed ff (2) device without adhesion. In Japan, the LIM-driven train the new type of end e ect compensator . The proposed ff has been used in the subway in some large cities, as the method is based on the new concept that the end e ect can LIM reduces the construction cost of tunnel because the be compensated only by supplying the eddy current syn- thin shape makes the sectional area of tunnel small and the chronizing with the LIM frequency in front of LIM, which large gradability enables the minimum length of the route. -

An Engineering Guide to Soft Starters
An Engineering Guide to Soft Starters Contents 1 Introduction 1.1 General 1.2 Benefits of soft starters 1.3 Typical Applications 1.4 Different motor starting methods 1.5 What is the minimum start current with a soft starter? 1.6 Are all three phase soft starters the same? 2 Soft Start and Soft Stop Methods 2.1 Soft Start Methods 2.2 Stop Methods 2.3 Jog 3 Choosing Soft Starters 3.1 Three step process 3.2 Step 1 - Starter selection 3.3 Step 2 - Application selection 3.4 Step 3 - Starter sizing 3.5 AC53a Utilisation Code 3.6 AC53b Utilisation Code 3.7 Typical Motor FLCs 4 Applying Soft Starters/System Design 4.1 Do I need to use a main contactor? 4.2 What are bypass contactors? 4.3 What is an inside delta connection? 4.4 How do I replace a star/delta starter with a soft starter? 4.5 How do I use power factor correction with soft starters? 4.6 How do I ensure Type 1 circuit protection? 4.7 How do I ensure Type 2 circuit protection? 4.8 How do I select cable when installing a soft starter? 4.9 What is the maximum length of cable run between a soft starter and the motor? 4.10 How do two-speed motors work and can I use a soft starter to control them? 4.11 Can one soft starter control multiple motors separately for sequential starting? 4.12 Can one soft starter control multiple motors for parallel starting? 4.13 Can slip-ring motors be started with a soft starter? 4.14 Can soft starters reverse the motor direction? 4.15 What is the minimum start current with a soft starter? 4.16 Can soft starters control an already rotating motor (flying load)? 4.17 Brake 4.18 What is soft braking and how is it used? 5 Digistart Soft Starter Selection 5.1 Three step process 5.2 Starter selection 5.3 Application selection 5.4 Starter sizing 1. -

MODELING and SIMULATING of SINGLE SIDE SHORT STATOR LINEAR INDUCTION MOTOR with the END EFFECT ∗ Hamed HAMZEHBAHMANI
Journal of ELECTRICAL ENGINEERING, VOL. 62, NO. 5, 2011, 302{308 MODELING AND SIMULATING OF SINGLE SIDE SHORT STATOR LINEAR INDUCTION MOTOR WITH THE END EFFECT ∗ Hamed HAMZEHBAHMANI Linear induction motors are under development for a variety of demanding applications including high speed ground transportation and specific industrial applications. These applications require machines that can produce large forces, operate at high speeds, and can be controlled precisely to meet performance requirements. The design and implementation of these systems require fast and accurate techniques for performing system simulation and control system design. In this paper, a mathematical model for a single side short stator linear induction motor with a consideration of the end effects is presented; and to study the dynamic performance of this linear motor, MATLAB/SIMULINK based simulations are carried out, and finally, the experimental results are compared to simulation results. K e y w o r d s: linear induction motor (LIM), magnetic flux distribution, dynamic model, end effect, propulsion force 1 INTRODUCTION al [5] developed an equivalent circuit by superposing the synchronous wave and the pulsating wave caused by the The linear induction motor (LIM) is very useful at end effect. Nondahl et al [6] derived an equivalent cir- places requiring linear motion since it produces thrust cuit model from the pole-by- pole method based on the directly and has a simple structure, easy maintenance, winding functions of the primary windings. high acceleration/deceleration and low cost. Therefore nowadays, the linear induction motor is widely used in Table 1. Experimental model specifications a variety of applications such as transportation, conveyor systems, actuators, material handling, pumping of liquid Quantity Unit Value metal, sliding door closers, curtain pullers, robot base Primary length Cm 27 movers, office automation, drop towers, elevators, etc. -

Electric Motors
SPECIFICATION GUIDE ELECTRIC MOTORS Motors | Automation | Energy | Transmission & Distribution | Coatings www.weg.net Specification of Electric Motors WEG, which began in 1961 as a small factory of electric motors, has become a leading global supplier of electronic products for different segments. The search for excellence has resulted in the diversification of the business, adding to the electric motors products which provide from power generation to more efficient means of use. This diversification has been a solid foundation for the growth of the company which, for offering more complete solutions, currently serves its customers in a dedicated manner. Even after more than 50 years of history and continued growth, electric motors remain one of WEG’s main products. Aligned with the market, WEG develops its portfolio of products always thinking about the special features of each application. In order to provide the basis for the success of WEG Motors, this simple and objective guide was created to help those who buy, sell and work with such equipment. It brings important information for the operation of various types of motors. Enjoy your reading. Specification of Electric Motors 3 www.weg.net Table of Contents 1. Fundamental Concepts ......................................6 4. Acceleration Characteristics ..........................25 1.1 Electric Motors ...................................................6 4.1 Torque ..............................................................25 1.2 Basic Concepts ..................................................7 -

Advancing Motivation Feedforward Control of Permanent Magnetic Linear Oscillating Synchronous Motor for High Tracking Precision
actuators Article Advancing Motivation Feedforward Control of Permanent Magnetic Linear Oscillating Synchronous Motor for High Tracking Precision Zongxia Jiao 1,2,3, Yuan Cao 1, Liang Yan 1,2,3,*, Xinglu Li 1,3, Lu Zhang 1,2,3 and Yang Li 1,3 1 School of Automation Science and Electrical Engineering, Beihang University, Beijing 100191, China; [email protected] (Z.J.); [email protected] (Y.C.); [email protected] (X.L.); [email protected] (L.Z.); [email protected] (Y.L.) 2 Ningbo Institute of Technology, Beihang University, Ningbo 315800, China 3 Science and Technology on Aircraft Control Laboratory, Beihang University, Beijing 100191, China * Correspondence: [email protected] Abstract: Linear motors have promising application to industrial manufacture because of their direct motion and thrust output. A permanent magnetic linear oscillating synchronous motor (PMLOSM) provides reciprocating motion which can drive a piston pump directly having advantages of high frequency, high reliability, and easy commercial manufacture. Hence, researching the tracking perfor- mance of PMLOSM is of great importance to realizing its popularization and application. Traditional PI control cannot fulfill the requirement of high tracking precision, and PMLOSM performance has high phase lag because of high control stiffness. In this paper, an advancing motivation feedforward control (AMFC), which is a combination of advancing motivation signal and PI control signal, is proposed to obtain high tracking precision of PMLOSM. The PMLOSM inserted with AMFC can provide accurate trajectory tracking at a high frequency. Compared with single PI control, AMFC can reduce the phase lag from −18 to −2.7 degrees, which shows great promotion of the tracking Citation: Jiao, Z.; Cao, Y.; Yan, L.; Li, precision of PMLOSM.