Radio Train Control System (ATACS) Y.BABA Y.TATEISHI K.MORI S.AOYAGI
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-
A Brief History of Railroad Operating Rules, Signaling and Train Control
A BRIEF HISTORY OF RAILROAD OPERATING RULES, SIGNALING AND TRAIN CONTROL Rules Education Transportation Department Operation of a railroad is governed by rules, issued to employees in the form of the “Book of Rules”. Usually they follow a more or less standard form. They specify general duties of various employees in the Operating Department and attempt to systematize their actions in any situation that may arise in operating trains. Like the Rules of the Road when driving an automobile. Rules Education Transportation Department There are several “Books of Rules” currently used by railroads in the United States. All rule books currently in use evolved from the: Uniform Train Rules and Rules for the Movement of Trains by Telegraphic Orders Adopted by the General Time Convention of the American Railroad Association in July of 1889 as the authorized Standard Code. Rules Education Transportation Department Originally, the General Time Convention was responsible for the establishment of Standard Time and the Time Zones in the United States on November 18, 1883. Congress officially adopted Standard Time and the Time Zones by the Standard Time Act of 1918. Rules Education Transportation Department The American Railroad Association became the Association of American Railroads in 1937. In 1938, the Uniform Train Rules and Rules for the Movement of Trains by Telegraphic Orders was renamed the Standard Code of Operating Rules. Rules Education Transportation Department Metra has adopted the General Code of Operating Rules. Over 300 other railroads, including the BNSF Railway, Canadian Pacific and Union Pacific Railroad have also adopted the GCOR. Rules Education Transportation Department Approximately 60 eastern railroads have adopted the Northeast Operating Rules Advisory Committee (NORAC) Operating Rules. -

(Jac) Railway Signaling Using Electronic Interlocking
Journal of Analysis and Computation (JAC) (An International Peer Reviewed Journal), www.ijaconline.com, ISSN 0973-2861 Volume XII, Issue I, Jan-June 2019, UGC Approved Journal RAILWAY SIGNALING USING ELECTRONIC INTERLOCKING SYSTEM R. KOMATHI, P. SATHISH, S. SRISRUTHI, T. BHUVANESHWARI, P. MANJULAMMA Graduate Scholar, Dept of ECE, Narayana Engineering College, Gudur, Nellore (Dt), AP, India. Assistant Professor, Dept of ECE, Narayana Engineering College, Gudur, Nellore (Dt), AP,India. ABSTRACT there is no arrangement of steering. Clear of Railway signaling system plays a vital role in the obstruction as available with road transportation, movement of trains. Electronic interlocking, an so there is a need to provide control on the advanced signaling system used worldwide has been introduced on Indian Railways. At present the movement of trains in the form of railway signals working installation of the system on Indian Railways which indicates to the loco pilots to stop or move are of different approved manufacturers. Although electronic interlocking system is supposed to give and also the speed at which they can pass a signal flawless performance. The nature of the appearance of a signal conveys the driver and instructs him to . Since the load carried by the trains and the speed stop, move or be cautious. Railway signaling is a which the trains can attain are high, they need system used to direct railway traffic and keep trains clear of each other at all times. Since the most more braking distances before coming to the stop important aspect of a railway signaling system is from full speed. Without signals the accidents safety and the decision making system. -

Reeves C Conserve Railway Signal Boxes with Images R1
Northumbria Research Link Citation: Reeves, Christopher (2016) Policy for conservation of heritage railway signal boxes in Great Britain. The Historic Environment: Policy and Practice, 7 (1). pp. 43-59. ISSN 1756-7505 Published by: Taylor & Francis URL: http://dx.doi.org/10.1080/17567505.2016.1142697 <http://dx.doi.org/10.1080/17567505.2016.1142697> This version was downloaded from Northumbria Research Link: http://nrl.northumbria.ac.uk/id/eprint/25451/ Northumbria University has developed Northumbria Research Link (NRL) to enable users to access the University’s research output. Copyright © and moral rights for items on NRL are retained by the individual author(s) and/or other copyright owners. Single copies of full items can be reproduced, displayed or performed, and given to third parties in any format or medium for personal research or study, educational, or not-for-profit purposes without prior permission or charge, provided the authors, title and full bibliographic details are given, as well as a hyperlink and/or URL to the original metadata page. The content must not be changed in any way. Full items must not be sold commercially in any format or medium without formal permission of the copyright holder. The full policy is available online: http://nrl.northumbria.ac.uk/policies.html This document may differ from the final, published version of the research and has been made available online in accordance with publisher policies. To read and/or cite from the published version of the research, please visit the publisher’s website (a subscription may be required.) Policy for conservation of heritage railway signal boxes in Great Britain Christopher D. -

The Brotherhood of Railroad Signalmen, 1900-1940
ABSTRACT Title of Document: THE MAINTAINERS OF SAFETY AND EFFICIENCY: THE BROTHERHOOD OF RAILROAD SIGNALMEN, 1900-1940 Robert Charles Williams, Master of Arts Degree, 2008 Directed By: Associate Professor David Sicilia, History Department The Brotherhood of Railroad Signalmen is a little-known technical and political organization that gained power during the opening decades of the twentieth century through the increasingly complex nature of members’ work, the vision of its leaders, and their abilities to gather support from other unions and the federal government. This thesis is organized around three themes: first, how the growing complexity of signal systems continually challenged signalmen to broaden signalmen’s skills, which, in turn, gave them an advantage in asking for recognition as a skilled craft union; second, how the skills that signalmen employed brought them into conflict with other unions over signal department jobs; and third, how, despite having only between 10,000 and 19,000 members, the organization’s leaders learned to negotiate using reason, evidence, and logic to demonstrate the union’s importance in the industry as the custodians of public safety and rail traffic efficiency. THE MAINTAINERS OF SAFETY AND EFFICIENCY: THE BROTHERHOOD OF RAILROAD SIGNALMEN, 1900-1940 By Robert Charles Williams Thesis submitted to the Faculty of the Graduate School of the University of Maryland, College Park, in partial fulfillment of the requirements for the degree of Master of Arts 2008 Advisory Committee: Associate Professor David Sicilia, Chair Professor Robert D. Friedel Betsy Mendelsohn, Lecturer © Copyright by Robert Charles Williams 2008 Acknowledgements The Genesis of the thesis came when Stephen Patrick, director of the City of Bowie Museums, showed me two greasy, seventy-five inch levers stacked against the wall of the Huntington Train Station and Bowie Museum. -
Transportation-Markings Database: Railway Signals, Signs, Marks & Markers
T-M TRANSPORTATION-MARKINGS DATABASE: RAILWAY SIGNALS, SIGNS, MARKS & MARKERS 2nd Edition Brian Clearman MOllnt Angel Abbey 2009 TRANSPORTATION-MARKINGS DATABASE: RAILWAY SIGNALS, SIGNS, MARKS, MARKERS TRANSPORTATION-MARKINGS DATABASE: RAILWAY SIGNALS, SIGNS, MARKS, MARKERS Part Iiii, Second Edition Volume III, Additional Studies Transportation-Markings: A Study in Communication Monograph Series Brian Clearman Mount Angel Abbey 2009 TRANSPORTATION-MARKINGS A STUDY IN COMMUNICATION MONOGRAPH SERIES Alternate Series Title: An Inter-modal Study ofSafety Aids Alternate T-M Titles: Transport ration] Mark [ing]s/Transport Marks/Waymarks T-MFoundations, 5th edition, 2008 (Part A, Volume I, First Studies in T-M) (2nd ed, 1991; 3rd ed, 1999, 4th ed, 2005) A First Study in T-M' The US, 2nd ed, 1993 (part B, Vol I) International Marine Aids to Navigation, 2nd ed, 1988 (Parts C & D, Vol I) [Unified 1st Edition ofParts A-D, 1981, University Press ofAmerica] International Traffic Control Devices, 2nd ed, 2004 (part E, Vol II, Further Studies in T-M) (lst ed, 1984) International Railway Signals, 1991 (part F, Vol II) International Aero Navigation, 1994 (part G, Vol II) T-M General Classification, 2nd ed, 2003 (Part H, Vol II) (lst ed, 1995, [3rd ed, Projected]) Transportation-Markings Database: Marine, 2nd ed, 2007 (part Ii, Vol III, Additional Studies in T-M) (1 st ed, 1997) TCD, 2nd ed, 2008 (Part Iii, Vol III) (lst ed, 1998) Railway, 2nd ed, 2009 (part Iiii, Vol III) (lst ed, 2000) Aero, 1st ed, 2001 (part Iiv) (2nd ed, Projected) Composite Categories -
This Edition Was Created on Tuesday June 4Th 2019 and Contains a List of Books and Magazines, Both Bound and Loose a List Of
This edition was created on Tuesday June 4th 2019 and contains a list of books and magazines, both bound and loose A list of new titles added since the creation of the last list can be found on the website in the 'book catalogues' tab To check availability of items please contact us either by – using the 'Contact Us' button on this website, or call +44(0)1947895170 (opening hours are shown on the website home page www.grosmontbooks.co.uk). Postage and Packing at or about cost due to Royal Mail charging structure based on weight and size of parcel. Reductions negotiable on volume purchases. Title Author Edition Publisher ISBN Comments Price Loose magazines, many issues available, send your list of requirements for us to check 04/1927 - Beyer-Peacock Quarterly Review 01/1932 British Railway Journal British Railways Magazine, North Eastern Region 50s & early 60s issues between 04/1950 & British Transport British Transport Review 08/1960 Commission published 3 times per year Cassell's Railways of the World Parts 6 – 18 Great Western Railway Journal Industrial Archaeology Industrial Railway Record Journal of the Institution of Locomotive Engineers various 1940s L&NWR Society Journal Loco Profile Profile Publications various issues 2.00 1946 Apr-Dec; 1947; 1948; 1949 Locomotive Express, practical articles by Jan-July, Sept- practical men Dec; 1950 Jan nos. 111-117; Locomotive Railway Carriage & Wagon 119-136; 669, Review 674, July 59 paper covers, most loose Locomotives Illustrated LYR Focus, the Lancashire & Yorkshire Railway Society Midland -
This Edition Was Created on 20 September, 2020 and Contains a List of Books Only (Magazines Are Now on a Separate Sheet) Postage
This edition was created on 20 September, 2020 and contains a list of books only (magazines are now on a separate sheet) To check availability of items please contact us either by – using the 'Contact Us' button on this website, or call +44(0)1947-895170 (opening hours are shown on the website home page www.grosmontbooks.co.uk). Postage and Packing at or about cost due to Royal Mail charging structure based on weight and size of parcel. Reductions negotiable on volume purchases. Title Author Edition Publisher ISBN Comments Price Station Master’s David Holmes 1992 BCA hardback, dust cover , good 2.50 Reflections,Images of Railway Life 1954-64. 'twixt London and Bristol michael hale 1985 oxford publishing 0860933644 hard back, dust cover, acceptable, part of rear 1.00 dj cut away "00" Gauge Layout and Design Ernest F Carter 1946 Percival Marshall card cover, edges well rubbed, overall OK++ 1.50 "Ratty", a history of the Ravenglass W McGowan 1st 1947 W McGowan Gradon hardback, no dj, good 6.00 and Eskdale Railway Gradon "The Coronation" and other Cecil J Allen 1938 Nicholson & Watson no cover, otherwise complete, reading copy 5.00 famous LNER Trains "The Coronation" and other Cecil J Allen 1937 Nicholson & Watson card cover, rubbed, otherwise good 5.00 famous LNER Trains “An Age of Kings”, a photographic JB Bucknall 1982 JB Bucknall 0950792209 hardback, dust jacket ruffled along top edge, 12.00 record of the final years of British edges slightly discoloured, otherwise good Railways steam locomotive operation 1956 – 1968 “Our model railway”, -

Special Feature Article
Special feature article The Current Status of Signal Control Systems, and Research and Development Yoshinori Kon Advanced Railway System Development Center, Research and Development Center of JR East Group The signal control system, having been developed over the long history of railways, involves several problems. To solve these problems, the signal control system needs to be reconfigured using state-of-the-art technologies. This paper discusses the wide-ranging signal control system by describing the transition and history of the related technologies up to the current status in order to give an understanding of the general image of the signal control system. This will be followed by a discussion of the problems involved in the current signal control system, and by an introduction of the development concept of the new system for which we are currently making research and development efforts. Finally, this paper will describe part of "the future signal control system" that we envisage. the number of track branches increased, "railway policemen" had 1 Introduction to be stationed at specified positions to ensure safety of the route, Railways are comprised of rolling stock such as electric trains and and manual signs were used. For example, "Safe (to proceed)" locomotives, and wayside equipment such as tracks, power systems, was indicated by raising one hand in the horizontal position, and signal control systems. It is a gigantic total system that does not "Caution" by raising one hand upright and "Danger (stop)" by work if any one of such various devices fails. Among others, the raising both hands upright. This is the beginning of the railway signal control system is an essential system for the railway in order to signal. -
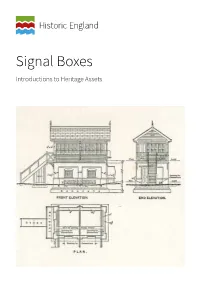
Introduction to Heritage Assets: Signal Boxes
Signal Boxes Introductions to Heritage Assets Summary Historic England’s Introductions to Heritage Assets (IHAs) are accessible, authoritative, illustrated summaries of what we know about specific types of archaeological site, building, landscape or marine asset. Typically they deal with subjects which lack such a summary. This can either be where the literature is dauntingly voluminous, or alternatively where little has been written. Most often it is the latter, and many IHAs bring understanding of site or building types which are neglected or little understood. Many of these are what might be thought of as ‘new heritage’, that is they date from after the Second World War. We have a rich heritage of railway buildings, some over 180 years old. This guide gives an overview of one of the most distinctive types, the signal box. These evolved at the beginning of the 1860s from huts and towers housing railway policemen. They comprised an elevated and well-glazed operating room with levers controlling points and signals, and a locking room below with the lower part of the lever frame. As with stations, the different railway companies had their own distinctive designs and liveries, and while most were of a fairly standard design, some signal boxes were one-offs, especially at major stations. There were still over 10,000 mechanical boxes in 1948 but numbers then fell, to 4,000 by 1970 and perhaps tenth of that today. Changing technologies mean there will be hardly any historic signal boxes remaining in active use on the public rail network in twenty years’ time. This guidance note has been written by John Minnis and edited by Paul Stamper. -

The "V" Style Interlocking Machine John Tilly
The "V" Style Interlocking Machine and it's use by London Underground John Tilly The "V" Style Interlocking Machine and if s use by London Underground The "V" Style Interlocking Machine and it's use by London Underground John Tilly COPYRIGHT © 2010 JOHN TILLY ISBN 0 9520421 0 X All rights reserved. No part of this book may be reproduced or transmitted in any form or by any means, electronic or mechanical, including photocopying, recording or any information storage and retrieval system, without permission in writing from the copyright holder and publisher. It is the author’s intention to update this publication whenever possible. Cover Illustrations Front Cover: One of the illustrations from Patent No 770187 showing the method of construction of the mechanical interlocking of a ‘V’ style interlocking machine (PO). Back Cover: A view of a King lever lock quadrant, part of Chief Signal Engineer’s diagram No BS32914a (LUL) 2 The "V" Style Interlocking Machine and if s use by London Underground This paper is dedicated to John Talbot and Frank Tuite without whose help it would not have materialised and both of whom passed away before it was published. Published by the author, JOHN TILLY, to whom any enquiries should be made: E Mail: [email protected] (Remove NOSPAM from address) Index Historical Aspects Page 4 Links to other parts of this publication: Site Information Design, Construction & Manufacture Titles, Acknowledgements, Preface & Author Other Users (following shortly) Illustrations are on a common linked page. Appendices mentioned to follow. 3 The "V" Style Interlocking Machine and if s use by London Underground Historical Aspects Railway signal interlocking has been well documented over the years and deteriled treatment is outside the scope of this paper.