Nuclear Magnetic Resonance
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Magnetic Moment of a Spin, Its Equation of Motion, and Precession B1.1.6
Magnetic Moment of a Spin, Its Equation of UNIT B1.1 Motion, and Precession OVERVIEW The ability to “see” protons using magnetic resonance imaging is predicated on the proton having a mass, a charge, and a nonzero spin. The spin of a particle is analogous to its intrinsic angular momentum. A simple way to explain angular momentum is that when an object rotates (e.g., an ice skater), that action generates an intrinsic angular momentum. If there were no friction in air or of the skates on the ice, the skater would spin forever. This intrinsic angular momentum is, in fact, a vector, not a scalar, and thus spin is also a vector. This intrinsic spin is always present. The direction of a spin vector is usually chosen by the right-hand rule. For example, if the ice skater is spinning from her right to left, then the spin vector is pointing up; the skater is rotating counterclockwise when viewed from the top. A key property determining the motion of a spin in a magnetic field is its magnetic moment. Once this is known, the motion of the magnetic moment and energy of the moment can be calculated. Actually, the spin of a particle with a charge and a mass leads to a magnetic moment. An intuitive way to understand the magnetic moment is to imagine a current loop lying in a plane (see Figure B1.1.1). If the loop has current I and an enclosed area A, then the magnetic moment is simply the product of the current and area (see Equation B1.1.8 in the Technical Discussion), with the direction n^ parallel to the normal direction of the plane. -

4 Nuclear Magnetic Resonance
Chapter 4, page 1 4 Nuclear Magnetic Resonance Pieter Zeeman observed in 1896 the splitting of optical spectral lines in the field of an electromagnet. Since then, the splitting of energy levels proportional to an external magnetic field has been called the "Zeeman effect". The "Zeeman resonance effect" causes magnetic resonances which are classified under radio frequency spectroscopy (rf spectroscopy). In these resonances, the transitions between two branches of a single energy level split in an external magnetic field are measured in the megahertz and gigahertz range. In 1944, Jevgeni Konstantinovitch Savoiski discovered electron paramagnetic resonance. Shortly thereafter in 1945, nuclear magnetic resonance was demonstrated almost simultaneously in Boston by Edward Mills Purcell and in Stanford by Felix Bloch. Nuclear magnetic resonance was sometimes called nuclear induction or paramagnetic nuclear resonance. It is generally abbreviated to NMR. So as not to scare prospective patients in medicine, reference to the "nuclear" character of NMR is dropped and the magnetic resonance based imaging systems (scanner) found in hospitals are simply referred to as "magnetic resonance imaging" (MRI). 4.1 The Nuclear Resonance Effect Many atomic nuclei have spin, characterized by the nuclear spin quantum number I. The absolute value of the spin angular momentum is L =+h II(1). (4.01) The component in the direction of an applied field is Lz = Iz h ≡ m h. (4.02) The external field is usually defined along the z-direction. The magnetic quantum number is symbolized by Iz or m and can have 2I +1 values: Iz ≡ m = −I, −I+1, ..., I−1, I. -

Measuring the Gyromagnetic Ratio Through Continuous Nuclear Magnetic Resonance Amy Catalano and Yash Aggarwal, Adlab, Boston University, Boston MA 02215
1 Measuring the gyromagnetic ratio through continuous nuclear magnetic resonance Amy Catalano and Yash Aggarwal, Adlab, Boston University, Boston MA 02215 Abstract—In this experiment we use continuous wave nuclear magnetic resonance to measure the gyromagnetic ratios of Hydro- gen, Fluorine, the H nuclei in Water, and Water with Gadolinium. Our best result for Hydrogen was 25.4 ± 0.19 rad/Tm, compared to the previously reported value of 23 rad/Tm [1]. Our results for the gyromagnetic ratio of water and water with gadolinium contained a greater difference than expected. I. INTRODUCTION Nuclear magnetic resonance has to do with the absorption of radiation by a nucleus in a magnetic field. The energy Fig. 1. Schematic diagram for continuous nmr of a nucleus in a B-field can be written in terms of the gyromagnetic ratio, γ the magnetic field, B, and the frequency, f: III. DATA AND ERROR ANALYSIS ∆E = γB = 2πf (1) For Hydrogen, we plotted 16 points on a graph of frequency The gyromagnetic ratio is a fundamental nuclear constant (Mhz) and magnetic field (Gs). Using the numpy library in and is a different value for every nucleus. Every nucleus Python we calculated a linear best fit line of has a magnetic moment. The principle of nuclear magnetic resonance is to put the nucleus with an intrinsic nuclear spin y = mx + b (2) in a magnetic field and measure at which B-field and frequency where the spin of the nucleus flips. As we vary the magnetic field and the nucleus absorbs the signal from the spectrometer, the Gs m = 217:89 ± 1:95 (3) nucleus will go from a lower energy state to a higher energy MHz state. -

A Measurement of the Neutron to 199Hg Magnetic Moment Ratio
A measurement of the neutron to 199Hg magnetic moment ratio S. Afacha,b,c, C. A. Bakerd, G. Bane, G. Bisonb, K. Bodekf, M. Burghoffg, Z. Chowdhurib, M. Daumb, M. Fertla,b,1, B. Frankea,b,2, P. Geltenborth, K. Greend,i, M. G. D. van der Grintend,i, Z. Grujicj, P. G. Harrisi, W. Heilk, V. Helaine´ b,e, R. Henneckb, M. Horrasa,b, P. Iaydjievd,3, S. N. Ivanovd,4, M. Kasprzakj, Y. Kerma¨ıdicl, K. Kircha,b, A. Knechtb, H.-C. Kochj,k, J. Krempela, M. Kuzniak´ b,f,5, B. Laussb, T. Leforte, Y. Lemiere` e, A. Mtchedlishvilib, O. Naviliat-Cuncice,6, J. M. Pendleburyi, M. Perkowskif, E. Pierreb,e, F. M. Piegsaa, G. Pignoll, P. N. Prashanthm, G. Quem´ ener´ e, D. Rebreyendl, D. Riesb, S. Roccian, P. Schmidt-Wellenburgb, A. Schnabelg, N. Severijnsm, D. Shiersi, K. F. Smithi,7, J. Voigtg, A. Weisj, G. Wyszynskia,f, J. Zejmaf, J. Zennera,b,o, G. Zsigmondb aETH Z¨urich, Institute for Particle Physics, CH-8093 Z¨urich, Switzerland bPaul Scherrer Institute (PSI), CH–5232 Villigen-PSI, Switzerland cHans Berger Department of Neurology, Jena University Hospital, D-07747 Jena, Germany dRutherford Appleton Laboratory, Chilton, Didcot, Oxon OX11 0QX, United Kingdom eLPC Caen, ENSICAEN, Universit´ede Caen, CNRS/IN2P3, Caen, France fMarian Smoluchowski Institute of Physics, Jagiellonian University, 30–059 Cracow, Poland gPhysikalisch Technische Bundesanstalt, Berlin, Germany hInstitut Laue–Langevin, Grenoble, France iDepartment of Physics and Astronomy, University of Sussex, Falmer, Brighton BN1 9QH, United Kingdom jPhysics Department, University of Fribourg, CH-1700 Fribourg, Switzerland kInstitut f¨urPhysik, Johannes–Gutenberg–Universit¨at,D–55128 Mainz, Germany lLPSC, Universit´eGrenoble Alpes, CNRS/IN2P3, Grenoble, France mInstituut voor Kern– en Stralingsfysica, Katholieke Universiteit Leuven, B–3001 Leuven, Belgium nCSNSM, Universit´eParis Sud, CNRS/IN2P3, Orsay Campus, France oInstitut f¨urKernchemie, Johannes-Gutenberg-Universitat, D-55128 Mainz, Germany Abstract The neutron gyromagnetic ratio has been measured relative to that of the 199Hg atom with an uncertainty of 0:8 ppm. -

Gyromagnetic Ratio Importance of Magnetic Resonance History of Magnetic Resonance
Lecture 1: Introduction Lecture aims to explain: 1. History and importance of magnetic resonance 2. Magnetic moment and angular momentum 3. Simple resonance theory 4. Gyromagnetic ratio Importance of magnetic resonance History of magnetic resonance First nuclear magnetic resonance (NMR) experiments followed a long line of research in related fields, and were described and carried out on LiCl molecular beams by Isidor Rabi in USA in 1938. In order for the spin of an atomic nucleus to be determined via Rabi’s technique, a sample needed to be vaporized and then exposed to a magnetic field. See details at www.magnet.fsu.edu/education/tutorials/pioneers/ Felix Bloch and Edward Purcell, working independently of each other in USA, expanded the technique for use on liquids and solids. Rabi was awarded the Nobel Prize in Physics for his work in 1944. Bloch and Purcell shared the Nobel Prize in Physics in 1952. Applications of magnetic resonance Determination of atomic and molecular structure, chemical composition Use in analytical chemistry, biochemistry, oil industry See examples at http://www.bruker.com/index.php?id=4816 http://www.process-nmr.com/fox-app/crd_blndng.htm Applications of magnetic resonance Magnetic resonance imaging (MRI) Primary use in medicine Available in many hospitals, requires strong non-uniform magnetic field MRI image of the brain can now be used to understand brain activity 2003 Nobel Prize for Medicine awarded to Peter Mansfield and Paul Lauterbur Applications of magnetic resonance Advanced experiments in nanostructures -

A Measurement of the Neutron to 199Hg Magnetic Moment Ratio
A measurement of the neutron to 199Hg magnetic moment ratio Article (Published Version) Afach, S, Baker, C A, Ban, G, Bison, G, Bodek, K, Burghoff, M, Chowdhuri, Z, Daum, M, Fertl, M, Franke, B, Geltenbort, P, Green, K, van der Grinten, M G D, Grujic, Z, Harris, P G et al. (2014) A measurement of the neutron to 199Hg magnetic moment ratio. Physics Letters B, 739. pp. 128- 132. ISSN 0370-2693 This version is available from Sussex Research Online: http://sro.sussex.ac.uk/id/eprint/51038/ This document is made available in accordance with publisher policies and may differ from the published version or from the version of record. If you wish to cite this item you are advised to consult the publisher’s version. Please see the URL above for details on accessing the published version. Copyright and reuse: Sussex Research Online is a digital repository of the research output of the University. Copyright and all moral rights to the version of the paper presented here belong to the individual author(s) and/or other copyright owners. To the extent reasonable and practicable, the material made available in SRO has been checked for eligibility before being made available. Copies of full text items generally can be reproduced, displayed or performed and given to third parties in any format or medium for personal research or study, educational, or not-for-profit purposes without prior permission or charge, provided that the authors, title and full bibliographic details are credited, a hyperlink and/or URL is given for the original metadata page and the content is not changed in any way. -
Lecture #2: Review of Spin Physics
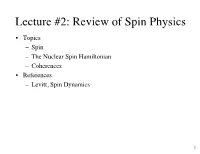
Lecture #2: Review of Spin Physics • Topics – Spin – The Nuclear Spin Hamiltonian – Coherences • References – Levitt, Spin Dynamics 1 Nuclear Spins • Protons (as well as electrons and neutrons) possess intrinsic angular momentum called “spin”, which gives rise to a magnetic dipole moment. Plank’s constant 1 µ = γ! 2 spin gyromagnetic ratio • In a magnetic field, the spin precesses around the applied field. z Precession frequency θ µ ω 0 ≡ γB0 B = B0zˆ Note: Some texts use ω0 = -gB0. y ! ! Energy = −µ ⋅ B = − µ Bcosθ x How does the concept of energy differ between classical and quantum physics • Question: What magnetic (and electric?)€ fields influence nuclear spins? 2 The Nuclear Spin Hamiltonian • Hˆ is the sum of different terms representing different physical interactions. ˆ ˆ ˆ ˆ H = H1 + H 2 + H 3 +! Examples: 1) interaction of spin with B0 2) interactions with dipole fields of other nuclei 3) nuclear-electron couplings • In general,€ we can think of an atomic€ nucleus as a lumpy magnet with a (possibly non-uniform) positive electric charge • The spin Hamiltonian contains terms which describe the orientation dependence of the nuclear energy The nuclear magnetic moment interacts with magnetic fields Hˆ = Hˆ elec + Hˆ mag The nuclear electric charge interacts with electric fields 3 € Electromagnetic Interactions • Magnetic interactions magnetic moment ! ! ! ! Hˆ mag ˆ B Iˆ B = −µ ⋅ = −γ" ⋅ local magnetic field quadrapole • Electric interactions monopole dipole Nuclear€ electric charge distributions can be expressed as a sum of multipole components. ! (0) ! (1) ! (2) ! C (r ) = C (r ) + C (r ) + C (r ) +" Symmetry properties: C(n)=0 for n>2I and odd interaction terms disappear Hence, for spin-½ nuclei there are no electrical ˆ elec H = 0 (for spin I€= 1/2) energy terms that depend on orientation or internal nuclear structure, and they behaves exactly like ˆ elec H ≠ 0 (for spin I >1/2) point charges! Nuclei with spin > ½ have electrical quadrupolar moments. -

Chapter 1 MAGNETIC NEUTRON SCATTERING
Chapter 1 MAGNETIC NEUTRON SCATTERING. And Recent Developments in the Triple Axis Spectroscopy Igor A . Zaliznyak'" and Seung-Hun Lee(2) (')Department of Physics. Brookhaven National Laboratory. Upton. New York 11973-5000 (')National Institute of Standards and Technology. Gaithersburg. Maryland 20899 1. Introduction..................................................................................... 2 2 . Neutron interaction with matter and scattering cross-section ......... 6 2.1 Basic scattering theory and differential cross-section................. 7 2.2 Neutron interactions and scattering lengths ................................ 9 2.2.1 Nuclear scattering length .................................................. 10 2.2.2 Magnetic scattering length ................................................ 11 2.3 Factorization of the magnetic scattering length and the magnetic form factors ............................................................................................... 16 2.3.1 Magnetic form factors for Hund's ions: vector formalism19 2.3.2 Evaluating the form factors and dipole approximation..... 22 2.3.3 One-electron spin form factor beyond dipole approximation; anisotropic form factors for 3d electrons..................... 27 3 . Magnetic scattering by a crystal ................................................... 31 3.1 Elastic and quasi-elastic magnetic scattering............................ 34 3.2 Dynamical correlation function and dynamical magnetic susceptibility ............................................................................................ -

1 Quantization of the Dirac Field 2 the Magnetic Moment of the Electron
Quantum Field Theory-I Problem Set n. 5 UZH and ETH, HS-2017 Prof. G. Isidori Assistants: M. Bordone, F. Buccioni, A. Karlberg, M. Zoller Due: 26-10-2017 http://www.physik.uzh.ch/en/teaching/PHY551/HS2017.html 1 Quantization of the Dirac field Starting from the decomposition Z d3~p 1 X (x) = as(~p)u(s)(p)e−ipx + bs(~p)yv(s)(p)eipx (1) (2π)3 p 2Ep s and using the anti-commutation relations far(~p); as(~q)yg = fbr(~p); bs(~q)yg = (2π)3δ(3)(~p − ~q) far(~p); as(~q)g = fbr(~p); bs(~q~)g = 0 (2) I. Show that y (3) y y f a(t; ~x); b (t; ~y)g = δ (~x − ~y)δab f a(t; ~x); b(t; ~y)g = f a(t; ~x); b (t; ~y)g = 0 (3) Write the expression of the Hamiltonian, the momentum operator, and the conserved charge Q µ ¯ µ s s y s s s y s (associated to the current J = γ ) in terms of Na (~p) = a (~p) a (~p) and Nb (~p) = a (~p) a (~p). II. Show that 2 [OΓ(x);OΓ(y)] = 0 for (x − y) < 0 (4) ¯ where OΓ(x) = (x)Γ (x) and Γ is a generic combination of Dirac matrices (Γ = γµ; γµγν;:::). Tip: express the commutator in terms of f (x); ¯(y)g and then use the fact that f (x); ¯(y)g = 0 for (x − y)2 < 0 (5) 2 The magnetic moment of the electron The generalization of the Dirac equation in presence of an electromagnetic field is (iD= − m) = (i@= − eA= − m) = 0 (6) I. -
Ross Stewart Outline of Lecture
Magnetic Neutron Scattering Ross Stewart Outline of Lecture • How does the neutron see magnetism? • Magnetic form factors • Magnetic neutron diffraction • Magnetic inelastic neutron scattering How do the neutrons see magnetism? Magnetic “dipoles” Magnetic Dipole Moment, μ by definition from classical electromagnetism µ = IA → A e → so in terms of orbital angular momentum, L e µ = L − 2m e Magnetic “dipoles” Magnetic Dipole Moment, μ Dirac (1928) also postulated an intrinsic angular momentum with associated magnetic moment (seen experimentally) → S e e Except that this time: µ = S − m e For particle with spin and orbital contributions: e µ = g J “g-factor” − 2m e J = L + S Magnetic moment defs. Angular momenta, are measured in units of ℏ, so we can write e µ = gµBJ where µB = − 2me Bohr Magneton The gyromagnetic ratio, is defined as the ratio of the magnetic dipole moment, to the total angular momentum e γ = g − 2m Therefore gµB = γ and µ = γ J − Magnetic properties of the neutron For neutrons, we assume a spin-only angular momentum, with eigenvalues of ±ℏ/2 z 1 “Spin-Up” = 1/2 | ↑ 0 s = 1/2 ms = ± 1/2 0 “Spin-Down” = -1/2 | ↓ 1 Magnetic properties of the neutron According to quantum mechanics, the “classical” angular momentum is replaced by an angular momentum operator, σ µ = γσ The components of σ for a spin-1/2 particle (the neutron) are 01 0 i 10 σ = 1 σ = 1 σ = 1 x 2 10 y 2 i −0 z 2 0 1 − Pauli spin matrices Magnetic properties of the neutron Some gyromagnetic ratios - (all spin-1/2) Electron: 1.76 x 105 MHz / T Proton: -

Lecture #2 Review of Classical MR
Lecture #2! Review of Classical MR • Topics – Nuclear magnetic moments – Bloch Equations – Imaging Equation – Extensions • Handouts and Reading assignments – van de Ven: Chapters 1.1-1.9 – de Graaf, Chapters 1, 4, 5, 10 (optional). – Bloch, “Nuclear Induction”, Phys Rev, 70:460-474, 1946 – Historical Notes • Lauterbur, “Image Formation by Induced Local Interactions: Examples Employing Nuclear Magnetic Resonance”, Nature 242:190-191, 1973. • Mansfield and Grannell, “NMR ‘Diffraction’ in solids?”, J. Phys. C: Solid State Phys., 6:L422-L426, 1973. 1 Spin • Protons (as well as electrons and neutrons) possess intrinsic angular momentum called “spin” • Spin gives rise to a magnetic dipole moment • Useful (though not entirely accurate) to think of a proton as a spinning or rotating charge generating a current, which, in turn, produces a magnetic moment. µ 2 Nuclear Magnetic Moment • Consider a point charge in circular motion: radius r velocity v charge e • From EM theory: in the far field a current loop looks just like a magnetic dipole with magnetic moment µ µ = current • loop area ev 2 e µ = ⋅πr = mvr 2πr 2m angular momentum L gyromagnetic ratio γ • Thus µ⇥ = γL⇥ 3 Gyromagnetic Ratio • γ often expressed as gµb e γ = where µb = and = spin g factor 2m g g ≅ 2 (electrons) Planck’s constant/2 Bohr magneton π (m = electron mass) • For protons gµn e γ = where µn = and g≅ 5.6 2mp γ nuclear magneton = 42.58 MHz/T 2π γ e Important for ESR, NMR Note, for electron spin: = 658 contrast agents, etc γ K. Zavoisky 4 Nuclear Spin in a Magnetic Field • In a uniform magnetic field, a magnetic dipole will experience a torque τ Example: compass ⇥ = µ⇥ B⇥ × • Potential energy given by: angle between E = µ⇥ B⇥ = µB cos θ µ and B − · − Classically, energy can take on any value between ± µB 5 Equation of Motion • Newton’s Law: dL⇥ = ⇥ dt • Combining previous equations: dµ⇥ = ⇥µ B⇥ dt × 6 Physical Picture: ! Single Spin in a Uniform Magnetic Field dµ⇥ = ⇥µ B⇥ Note: µ = constant dt × | | B = B0zˆ z Precession frequency µ θ ω 0 ≡ γB0 Note: Some texts use ω0 = -γB0. -

Nuclear Magnetic Resonance
Nuclear Magnetic Resonance Yale Chemistry 800 MHz Supercooled Magnet Bo Atomic nuclei in Atomic nuclei in the presence The absence of of a magnetic field a magnetic field α spin - with the field β spin - opposed to the field The Precessing Nucleus resonance α spin β spin Ho resonance no resonance no resonance Rf The Precessing Nucleus Again The Continuous Wave Spectrometer The Fourier Transform Spectrometer Observable Nuclei • Odd At. Wt.; s = ±1/2 1 13 15 19 31 Nuclei H1 C6 N7 F9 P15 …. Abundance (%) 99.98 1.1 0.385 100 100 • Odd At. No.; s = ±1 2 14 Nuclei H1 N7 … • Unobserved Nuclei 12 16 32 C6 O8 S16… •Δ E = hν h = Planck’s constant:1.58x10-37kcal- sec •Δ E = γh/2π(Bo) γ = Gyromagnetic ratio: sensitivity of nucleus to the magnetic field. 1H = 2.67x104 rad sec-1 gauss-1 • Thus: ν = γ/2π(Bo) • For a proton, if Bo = 14,092 gauss (1.41 tesla, 1.41 T), ν = 60x106 cycles/sec = 60 MHz and •Δ EN = Nhν = 0.006 cal/mole Rf Field vs. Magnetic Field for a Proton E 60 MHz 500 MHz ΔE = γh/2π(Bo) 100 MHz 1.41 T 2.35 T 11.74 T Bo Rf Field /Magnetic Field for Some Nuclei o Nuclei Rf (MHz) B (T) γ/2π (MHz/T) 1H 500.00 11.74 42.58 13C 125.74 11.74 10.71 2H 76.78 11.74 6.54 19F 470.54 11.74 40.08 31P 202.51 11.74 17.25 Fortunately, all protons are not created equal! at 1.41 T 60 MHz 60,000,600 Hz 60,000,000 Hz upfield downfield Me Si 60 Hz shielded 4 deshielded 240 Hz } 10 9 8 7 6 5 4 3 2 1 0 δ scale (ppm) } at 500 MHz 500 Hz chemical δ = (νobs - νTMS)/νinst(MHz) = (240.00 - 0)/60 = 4.00 shift Where Nuclei Resonate at 11.74T 12 ppm 2 H RCO2H 12 ppm 1