AN-1057 Ten Ways to Bulletproof RS-485 Interfaces
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

RS-485: Still the Most Robust Communication Table of Contents
TUTORIAL RS-485: Still the Most Robust Communication Table of Contents Abstract...........................................................................................................................1 RS-485 vs. RS-422..............................................................................................................................2 An In-Depth Look at RS-485...........................................................................................................3 Challenges of the Industrial Environment.....................................................................................5 Protecting Systems from Harsh Environments.........................................................................5 Conclusion......................................................................................................................10 References......................................................................................................................10 Abstract Despite the rise in popularity of wireless networks, wired serial networks continue to provide the most robust, reliable communication, especially in harsh environments. These well-engineered networks provide effective communication in industrial and building automation applications, which require immunity from noise, electrostatic discharge and voltage faults, all resulting in increased uptime. This tutorial reviews the RS-485 protocol and discusses why it is widely used in industrial applications and the common problems it solves. www.maximintegrated.com -

SAE J1587 (2002 Standard).Pdf
SURFACE REV. VEHICLE J1587 FEB2002 RECOMMENDED Issued 1988-01 400 Commonwealth Drive, Warrendale, PA 15096-0001 PRACTICE Revised 2002-02 Superseding J1587 JUL1998 Electronic Data Interchange Between Microcomputer Systems in Heavy-Duty Vehicle Applications 1. Scope—This SAE Recommended Practice defines a document for the format of messages and data that is of general value to modules on the data communications link. Included are field descriptions, size, scale, internal data representation, and position within a message. This document also describes guidelines for the frequency of and circumstances in which messages are transmitted. In order to promote compatibility among all aspects of electronic data used in heavy-duty applications, it is the intention of the SAE Truck and Bus Low Speed Communications Network Subcommittee (formerly Data Format Subcommittee) (in conjunction with other industry groups) to develop recommended message formats for: a. Vehicle and Component Information—This includes all information that pertains to the operation of the vehicle and its components (such as performance, maintenance, and diagnostic data). b. Routing and Scheduling Information—Information related to the planned or actual route of the vehicle. It includes current vehicle location (for example, geographical coordinates) and estimated time of arrival. c. Driver Information—Information related to driver activity. Includes driver identification, logs, (for example, DOT), driver expenses, performance, status, and payroll data. d. Freight Information—Provides data associated with cargo being shipped, picked up, or delivered. Includes freight status, overage, shortage and damage reporting, billing and invoice information as well as customer and consignee data. This document represents the recommended formats for basic vehicle and component identification and performance data. -

SAE International® PROGRESS in TECHNOLOGY SERIES Downloaded from SAE International by Eric Anderson, Thursday, September 10, 2015
Downloaded from SAE International by Eric Anderson, Thursday, September 10, 2015 Connectivity and the Mobility Industry Edited by Dr. Andrew Brown, Jr. SAE International® PROGRESS IN TECHNOLOGY SERIES Downloaded from SAE International by Eric Anderson, Thursday, September 10, 2015 Connectivity and the Mobility Industry Downloaded from SAE International by Eric Anderson, Thursday, September 10, 2015 Other SAE books of interest: Green Technologies and the Mobility Industry By Dr. Andrew Brown, Jr. (Product Code: PT-146) Active Safety and the Mobility Industry By Dr. Andrew Brown, Jr. (Product Code: PT-147) Automotive 2030 – North America By Bruce Morey (Product Code: T-127) Multiplexed Networks for Embedded Systems By Dominique Paret (Product Code: R-385) For more information or to order a book, contact SAE International at 400 Commonwealth Drive, Warrendale, PA 15096-0001, USA phone 877-606-7323 (U.S. and Canada) or 724-776-4970 (outside U.S. and Canada); fax 724-776-0790; e-mail [email protected]; website http://store.sae.org. Downloaded from SAE International by Eric Anderson, Thursday, September 10, 2015 Connectivity and the Mobility Industry By Dr. Andrew Brown, Jr. Warrendale, Pennsylvania, USA Copyright © 2011 SAE International. eISBN: 978-0-7680-7461-1 Downloaded from SAE International by Eric Anderson, Thursday, September 10, 2015 400 Commonwealth Drive Warrendale, PA 15096-0001 USA E-mail: [email protected] Phone: 877-606-7323 (inside USA and Canada) 724-776-4970 (outside USA) Fax: 724-776-0790 Copyright © 2011 SAE International. All rights reserved. No part of this publication may be reproduced, stored in a retrieval system, distributed, or transmitted, in any form or by any means without the prior written permission of SAE. -

IPUG75 2.2 Table of Contents
PCI Express 2.0 x1, x4 Endpoint IP Core User’s Guide October 2014 IPUG75_2.2 Table of Contents Chapter 1. Introduction .......................................................................................................................... 6 Quick Facts ........................................................................................................................................................... 7 Features ................................................................................................................................................................ 7 PHY Layer.................................................................................................................................................... 7 Data Link Layer............................................................................................................................................ 8 Transaction Layer ........................................................................................................................................ 8 Configuration Space Support....................................................................................................................... 8 Top Level IP Support ................................................................................................................................... 8 Chapter 2. Functional Description ...................................................................................................... 10 Overview ............................................................................................................................................................ -

Getting Started with Your PCI Serial Hardware and Software for Windows 95
Serial Getting Started with Your PCI Serial Hardware and Software for Windows 95 PCI Serial for Windows 95 December 1997 Edition Part Number 321824A-01 Internet Support E-mail: [email protected] FTP Site: ftp.natinst.com Web Address: http://www.natinst.com Bulletin Board Support BBS United States: 512 794 5422 BBS United Kingdom: 01635 551422 BBS France: 01 48 65 15 59 Fax-on-Demand Support 512 418 1111 Telephone Support (USA) Tel: 512 795 8248 Fax: 512 794 5678 International Offices Australia 03 9879 5166, Austria 0662 45 79 90 0, Belgium 02 757 00 20, Brazil 011 288 3336, Canada (Ontario) 905 785 0085, Canada (Québec) 514 694 8521, Denmark 45 76 26 00, Finland 09 725 725 11, France 01 48 14 24 24, Germany 089 741 31 30, Hong Kong 2645 3186, Israel 03 6120092, Italy 02 413091, Japan 03 5472 2970, Korea 02 596 7456, Mexico 5 520 2635, Netherlands 0348 433466, Norway 32 84 84 00, Singapore 2265886, Spain 91 640 0085, Sweden 08 730 49 70, Switzerland 056 200 51 51, Taiwan 02 377 1200, United Kingdom 01635 523545 National Instruments Corporate Headquarters 6504 Bridge Point Parkway Austin, Texas 78730-5039 USA Tel: 512 794 0100 © Copyright 1997 National Instruments Corporation. All rights reserved. Important Information Warranty The serial hardware is warranted against defects in materials and workmanship for a period of two years from the date of shipment, as evidenced by receipts or other documentation. National Instruments will, at its option, repair or replace equipment that proves to be defective during the warranty period. -

LVDS Owner's Manual
LVDS Owner’s Manual Low-Voltage Differential Signaling 3rd Edition, Spring 2004 National Semiconductor The Sight & Sound of Information LVDS Owner’s Manual Low-Voltage Differential Signaling Spring 2004 3rd Edition The last thing an engineer ever does is read the owner’s manual. An engineer expects to be able to use his or her skills and training to figure out how to use a product without ever referring to the instructions. In my experience, either through intuition or trial and error, most of us will eventually figure out the basics. However, while this may be reasonable for assembling a toy or even working on a car, it is an expensive and time consuming way to go about electrical engineering. National Semiconductor has written this LVDS Owner’s Manual to assist you. This design guide compiles the information and concepts that we think you will need to save you valuable time and money and maximize the benefit of using National's Low-Voltage Differential Signaling (LVDS) solutions. National is the premier analog semiconductor solution supplier and the innovator of LVDS. Our experi- ence with LVDS gives us the insight to be your trusted advisor. This third edition of the LVDS Owner’s Manual is an easy-to-read compendium that contains useful information for everyone. There is an intro- duction to the technology, concepts, and applications for someone just starting to design with LVDS. We offer guidance on how to select the right LVDS device and family for your application whether it is chip- to-chip, mezzanine-to-mezzanine, or box-to-box. -

Single-Port PCI Card— RS-232/422/485/530
NOVEMBER 2001 IC073C IC074C-R2 Single-Port PCI Card— RS-232/422/485/530 CUSTOMER Order toll-free in the U.S. 24 hours, 7 A.M. Monday to midnight Friday: 877-877-BBOX SUPPORT FREE technical support, 24 hours a day, 7 days a week: Call 724-746-5500 or fax 724-746-0746 INFORMATION Mail order: Black Box Corporation, 1000 Park Drive, Lawrence, PA 15055-1018 Web site: www.blackbox.com • E-mail: [email protected] TRADEMARKS TRADEMARKS USED IN THIS MANUAL OS/2 and PS/2 are registered trademarks of International Business Machines Corporation. Windows and Windows NT are registered trademarks of Microsoft Corporation. UL is a registered trademark of Underwriters Laboratories Incorporated. Any other trademarks used in this manual are acknowledged to be the property of the trademark owners. 1 SINGLE-PORT PCI CARD—RS-232/422/485/530 FEDERAL COMMUNICATIONS COMMISSION AND INDUSTRY CANADA RADIO FREQUENCY INTERFERENCE STATEMENTS This equipment generates, uses, and can radiate radio frequency energy and if not installed and used properly, that is, in strict accordance with the manufacturer’s instructions, may cause interference to radio communication. It has been tested and found to comply with the limits for a Class A computing device in accordance with the specifications in Subpart B of Part 15 of FCC rules, which are designed to provide reasonable protection against such interference when the equipment is operated in a commercial environment. Operation of this equipment in a residential area is likely to cause interference, in which case the user at his own expense will be required to take whatever measures may be necessary to correct the interference. -
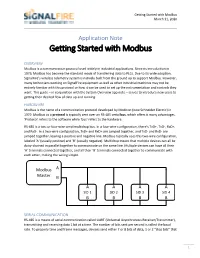
Getting Started with Modbus March 31, 2020
Getting Started with Modbus March 31, 2020 Application Note Getting Started with Modbus OVERVIEW Modbus is a communication protocol used widely in industrial applications. Since its introduction in 1979, Modbus has become the standard mode of transferring data to PLCs. Due to its wide adoption, SignalFire’s wireless telemetry system is natively built from the ground up to support Modbus. However, many technicians working on SignalFire equipment as well as other industrial machines may not be entirely familiar with this protocol or how it can be used to set up the instrumentation and controls they want. This guide – in conjunction with the System Overview app note – serves to introduce new users to getting their desired flow of data up and running. HARDWARE Modbus is the name of a communication protocol developed by Modicon (now Schneider Electric) in 1979. Modbus as a protocol is typically sent over an RS-485 serial bus, which offers it many advantages. ‘Protocol’ refers to the software while ‘bus’ refers to the hardware. RS-485 is a two or four-wire serial multidrop bus. In a four-wire configuration, there’s TxD+, TxD-, RxD+, and RxD-. In a two-wire configuration, TxD+ and RxD+ are jumped together, and TxD- and RxD- are jumped together, leaving a positive and negative line. Modbus typically uses this two-wire configuration, labeled ‘A’ (usually positive) and ‘B’ (usually negative). Multidrop means that multiple devices can all be daisy-chained in parallel together to communicate on the same line. Multiple devices can have all their ‘A’ terminals connected together, and all their ‘B’ terminals connected together to communicate with each other, making the wiring simple. -
Surface Vehicle Standard
SURFACE J1939-01 VEHICLE Issued 2000-09 STANDARD Submitted for recognition as an American National Standard Recommended Practice for Control and Communications Network for On-Highway Equipment Foreword—This series of SAE Recommended Practices have been developed by the Truck and Bus Control and Communications Network Subcommittee of the Truck and Bus Electrical and Electronics Committee. The objectives of the subcommittee are to develop information reports, recommended practices and standards concerned with the requirements design and usage of devices which transmit electrical signals and control information among vehicle components. The usage of these recommended practices is not limited to truck and bus applications, other applications may utilize them as long as they adhere to the recommended practices listed herein. These SAE Recommended Practices are intended as a guide toward standard practice and are subject to change so as to keep pace with experience and technical advances. As described in the parent document, SAE J1939, there are a minimum of five documents required to fully define a complete version of this network. This particular document, SAE J1939-01, identifies one such complete network by specifying the particular set of SAE J1939 documents which define the Truck and Bus Control and Communications Vehicle Network as it applies to on-highway equipment. Table of Contents 1 Scope ......................................................................................................................................2 1.1 Degree -

Selection Guide for Automotive & Industrial Fanless Box-PC
1/127 PDF Online Selection Guide Stand vom 02.10.2021 - 23:17:17 Bitte laden Sie sich bei Bedarf hier eine aktualisierte Fassung dieses Dokuments herunter! 180 von 180 Artikel aus dem Bereich Automotive & Industrial Box-PC wurden für das PDF ausgewählt. Selection Guide Automotive & Industrial Fanless Box-PC 1. Automotive Box-PC / Car-PC 3 2. KI-Automotive Box-PC 31 3. Railway Box-PC 51 4. Industrial Box-PC / IoT Gateways 61 5. Factory Automation Box-PC 95 6. Digital Signage Box-PC 107 7. Video Surveillance 119 8. Zubehör für Box-PC 127 DELTA COMPONENTS ...we make the difference! 3/127 Automotive Box-PC PDF Online Selection Guide Stand vom 02.10.2021 - 23:17:17 Bitte laden Sie sich bei Bedarf hier eine aktualisierte Fassung dieses Dokuments herunter! 41 von 41 Artikel aus dem Bereich Automotive Box-PC wurden für das PDF ausgewählt. Advanced Telematics Computer Advanced Telematics Computer Advanced Telematics Computer 8010-7AF/7DF 8010-7A 8010-7B Cooling System Swappable fan kit (externally removable fans) Fanless Fanless Mounting System Wall Mount, DIN Rail Wall Mount, DIN Rail Wall Mount, DIN Rail CPU Intel® Core i7-8700T Coffee Lake-S, 6-core, Intel® Core i7-8700T Coffee Lake-S, 6-core, Intel® Core i7-8700T Coffee Lake-S, 6-core, 2.4GHz 2.4GHz 2.4GHz Chipset Intel® Q370 platform controller hub Intel® Q370 platform controller hub Intel® Q370 platform controller hub Watchdog Timer - - - Basic Equipment 8GB 8GB 8GB Maximum Equipment 64G (for two channels) 64G (for two channels) 64G (for two channels) DRAM - - - SDRAM - - - DIMM / MemorySocket -

Archived: Getting Started with Your at Serial Hardware and Software For
Serial Getting Started with Your AT Serial Hardware and Software for Windows NT AT Serial for Windows NT September 2000 Edition Part Number 321572D-01 Support Worldwide Technical Support and Product Information ni.com National Instruments Corporate Headquarters 11500 North Mopac Expressway Austin, Texas 78759-3504 USA Tel: 512 794 0100 Worldwide Offices Australia 03 9879 5166, Austria 0662 45 79 90 0, Belgium 02 757 00 20, Brazil 011 284 5011, Canada (Calgary) 403 274 9391, Canada (Ontario) 905 785 0085, Canada (Québec) 514 694 8521, China 0755 3904939, Denmark 45 76 26 00, Finland 09 725 725 11, France 01 48 14 24 24, Germany 089 741 31 30, Greece 30 1 42 96 427, Hong Kong 2645 3186, India 91805275406, Israel 03 6120092, Italy 02 413091, Japan 03 5472 2970, Korea 02 596 7456, Mexico (D.F.) 5 280 7625, Mexico (Monterrey) 8 357 7695, Netherlands 0348 433466, New Zealand 09 914 0488, Norway 32 27 73 00, Poland 0 22 528 94 06, Portugal 351 1 726 9011, Singapore 2265886, Spain 91 640 0085, Sweden 08 587 895 00, Switzerland 056 200 51 51, Taiwan 02 2528 7227, United Kingdom 01635 523545 For further support information, see the Technical Support Resources appendix. To comment on the documentation, send e-mail to [email protected] © Copyright 1997, 2000 National Instruments Corporation. All rights reserved. Important Information Warranty The serial hardware is warranted against defects in materials and workmanship for a period of one year from the date of shipment, as evidenced by receipts or other documentation. National Instruments will, at its option, repair or replace equipment that proves to be defective during the warranty period. -

Cybersecurity Research Considerations for Heavy Vehicles
DOT HS 812 636 December 2018 Cybersecurity Research Considerations for Heavy Vehicles Disclaimer This publication is distributed by the U.S. Department of Transportation, National Highway Traffic Safety Administration, in the interest of information exchange. The opinions, findings, and conclusions expressed in this publication are those of the authors and not necessarily those of the Department of Transportation or the National Highway Traffic Safety Administration. The United States Government assumes no liability for its contents or use thereof. If trade or manufacturers’ names are mentioned, it is only because they are considered essential to the object of the publication and should not be construed as an endorsement. The United States Gov- ernment does not endorse products or manufacturers. Suggested APA Format Citation: Stachowski, S., Bielawski, R., & Weimerskirch, A. (2018, December). Cybersecurity research considerations for heavy vehicles (Report No. DOT HS 812 636). Washington, DC: National Highway Traffic Safety Administration. 1. Report No. 2. Government Accession No. 3. Recipient's Catalog No. DOT HS 812 636 4. Title and Subtitle 5. Report Date Cybersecurity Research Considerations for Heavy Vehicles December 2018 6. Performing Organization Code 7. Authors 8. Performing Organization Report No. Stephen Stachowski, P.E. (UMTRI), Russ Bielawski (UMTRI), André Weimerskirch 9. Performing Organization Name and Address 10. Work Unit No. (TRAIS) University of Michigan Transportation Research Institute 2901 Baxter Rd Ann Arbor, MI 48109 11. Contract or Grant No. DTNH22-15-R-00101, a Vehicle Electronics Systems Safety IDIQ 12. Sponsoring Agency Name and Address 13. Type of Report and Period Covered National Highway Traffic Safety Administration Final Report 1200 New Jersey Avenue SE.