The Design of a Scanning Tunneling Microscope
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-
Atomic Force Microscope for Planetary Applications T
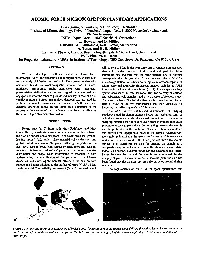
ATOMIC FORCE MICROSCOPE FOR PLANETARY APPLICATIONS T. Akiyama, S. Gautsch, N.F. de Rooij,U. Staufer Institute of Microtechnology, Univ.of Neuch8te1, Jaquet-Droz 1,2007 Neuchatel, Switzerland. Ph. Niedermann CSEM, Jaquet-Droz 1,2007 NeucMtel , Switzerland. L. Howald, and D. Miiller Nanosurf AG, Austrasse4,4410 Liestal, Switzerland. A. Tonin, and H.-R Hidber Insitute of Physics, Univ. of Basel, Klingelbergstr.82 4056 Basel, Switzerland W. T. Pike, M. H. Hecht Jet Propulsion Laboratory, CaliforniaInstitute of Technology, 4800 Oak Grove Dr. Pasadena, CA91 109, USA ABSTRACT will be sent to Mars in the next three years, contains a microscopy station to produceimages of dustand soil particles. Mars Wehave developed, built and tested an atomicforce Pathfinder data indicates that the mean particle size of Martian microscope (AFM) for planetary science applications, inparticular atmosphericdust is less than 2 micrometers.Hence MECA's for the study of Martian dust and soil. The system consists of a microscopy station, in addition toan optical microsope capable of controller board, anelectromagnetic scanner and micro-a taking color and ultraviolet fluorescent images, includes an AFM fabricatedsensor-chip. Eight cantilevers withintegrated, to image far below optical resolution (fig. 1). The sample-handling piezoresistivedeflection sensors are alignedin a row and are system consists of an external robot arm, for delivery of surface engaged one after the otherto provide redundancy in case of tip or and subsurface soil samples, and a two-degree-of-freedom stage. cantilever failure. Silicon and molded diamond tips are used for The stage contains 69 substrates that can be rotated in turn to the probing the sample. -

New Imaging Modes for Analyzing Suspended Ultra-Thin Membranes by Double-Tip Scanning Probe Microscopy Kenan Elibol1,4, Stefan Hummel1,4, Bernhard C
www.nature.com/scientificreports OPEN New imaging modes for analyzing suspended ultra-thin membranes by double-tip scanning probe microscopy Kenan Elibol1,4, Stefan Hummel1,4, Bernhard C. Bayer1,2 & Jannik C. Meyer1,3* Scanning probe microscopy (SPM) techniques are amongst the most important and versatile experimental methods in surface- and nanoscience. Although their measurement principles on rigid surfaces are well understood and steady progress on the instrumentation has been made, SPM imaging on suspended, fexible membranes remains difcult to interpret. Due to the interaction between the SPM tip and the fexible membrane, morphological changes caused by the tip can lead to deformations of the membrane during scanning and hence signifcantly infuence measurement results. On the other hand, gaining control over such modifcations can allow to explore unknown physical properties and functionalities of such membranes. Here, we demonstrate new types of measurements that become possible with two SPM instruments (atomic force microscopy, AFM, and scanning tunneling microscopy, STM) that are situated on opposite sides of a suspended two-dimensional (2D) material membrane and thus allow to bring both SPM tips arbitrarily close to each other. One of the probes is held stationary on one point of the membrane, within the scan area of the other probe, while the other probe is scanned. This way new imaging modes can be obtained by recording a signal on the stationary probe as a function of the position of the other tip. The frst example, which we term electrical cross- talk imaging (ECT), shows the possibility of performing electrical measurements across the membrane, potentially in combination with control over the forces applied to the membrane. -

DNA in Nanotechnology
Molecular Manipulations DNA in Nanotechnology There is an avalanche-like increase of reports, where molecules of nucleic acids (DNA and RNA) appear as an object of nanotechnology research and/or as material for nano-sized devices. In many cases scanning probe microscopy (SPM) is the most powerful and informative research tool. Examinations as well as precise manipulations can be performed this way. What is important when SPM is applied to molecular level experiments? Three facets are illustrated further. • Appropriate probes see the next page • Substrates and deposition protocols see page 3 • AFM long-term stability see page 4 www.ntmdt.com 1 Molecular Manipulations Probe sharpness determines resolution AFM probe tip DNA molecule 10-20nm Strand width is usually seen in AFM image Tiny features of the relief can not be detected if the probe tip radius is too large. When imaged with conventional probe, the width of the DNA molecule is 10-20 nm usually, while real strand diameter is about 2 nm. Here are shown short poly(dG)–poly(dC) DNA fragments deposited on modified HOPG (see below). Small unwound single-strand fragments can be seen (bold arrow on the scan) and even helical pitch of the DNA molecule can be resolved (thin arrows) with a sharp enough tip (like DLC probe tip shown on the inlet). See comprehensive discussion on sub-molecular imaging in “High- resolution atomic force microscopy of duplex and triplex DNA molecules” Klinov D. et al. Nanotechnology (2007), V18, N22, p.225102. Related info: 1 micron-long Whisker tip grown on silicon probe apex Whisker-type sharp AFM probes provides extremely high aspect ratio, tip radius is about 10 nm. -
Scanning Tunneling Microscope for Nanoeducation
NaioSTM Scanning tunneling microscope for nanoeducation Controller and scan head Extremely simple handling Atomic resolution in minutes integrated in a single device and reliable operation Next-Level Nanotechnology Tools [email protected] / www.nanosurf.com swiss quality NaioSTM Your easy entry into the world of atoms The first scanning tunneling microscope (STM) was developed in 1981 by Binnig and Rohrer at the IBM Research Laboratory in Rüschlikon, Switzerland, for the first time making atoms directly visible to a small group of specialists. In 1997, Nanosurf went one step further and brought atoms to the classroom! Today, well over a thousand Nanosurf STMs play a crucial role in nanotechnology education around the globe: Atomic lattices. Left: Graphite (HOPG), • Teachers appreciate the ease of use of Nanosurf STMs, allowing them to offer quick scan size 2 nm. Right: MoS2, scan size and hassle-free classroom demonstrations to their students. 3 nm. • Students are motivated by the rapid successes achieved when using the STMs themselves during hands-on training. • Anyone can safely handle a Nanosurf STM, since STM tips are simply cut from Pt/Ir wire without requiring etching in hazardous substances. The NaioSTM is the successor to the well-known Easyscan 2 STM and brings together scan head and controller in a single instrument for even greater ease of installation, usability, and transportability. The whole setup is very resistant to vibrations and can Step heights. Left: Gold, scan size be used to achieve atomic resolution on HOPG in standard classroom situations. 500 nm. Right: YBCO, scan size 180 nm. Place your sample.. -

Nano-Images from Mars
News From: Issue: September Nano-images from Mars Nanostructures were measured on another planet for the first time on 9th July when the NASA Phoenix Mars Probe recorded images with nanometre resolution using its onboard Swiss-made atomic force microscope, and successfully transmitted them back to Earth. The first images of the microscope – which was developed by the universities of Neuchâtel and Basel, and by the Swiss company Nanosurf – show the surface of a test grid with unprecedented detail. The successful imaging of this test grid served as a calibration for the nano-microscope and documents full functionality of the instrument. “The operation of our atomic force microscope under these harsh conditions demonstrates the suitability for daily use of such nano-imaging devices,” said Nanosurf Mars project leader Dominik Braendlin. “We are now anxiously awaiting the upcoming images of Mars surface particles". The Phoenix Mars probe is scheduled to investigate the shape and structure of Mars dust and soil particles. Their surfaces – when documented with the proper resolution – harbour a wealth of scientific data. Erosion and scratch marks on these particles, for instance, can give crucial clues as to whether the particles were ever transported by liquid water on Mars. The resolution required for this task is only attained by the atomic force microscope. In contrast to optical microscopes, this nano-imaging device touches the surface of the particles to be analyzed with a very sharp tip, recording surface height information in a scanning-type motion. The Nanosurf atomic force microscope is part of the MECA (Microscopy, Electrochemistry, and Conductivity Analysis) unit – one of seven on the Phoenix Mars probe – which has been providing NASA with scientific data from the very start of its deployment. -

Low Cost Electrical Probe Station Using Etched Tungsten Nanoprobes: Role
Low cost electrical probe station using etched Tungsten nanoprobes: Role of cathode geometry Rakesh K. Prasada and Dilip K. Singha* aDepartment of Physics, Birla Institute of Technology Mesra, Ranchi-835215. *Email: [email protected] Abstract Electrical measurement of nano-scale devices and structures requires skills and hardware to make nano-contacts. Such measurements have been difficult for number of laboratories due to cost of probe station and nano-probes. In the present work, we have demonstrated possibility of assembling low cost probe station using USB microscope (US $ 30) coupled with in-house developed probe station. We have explored the effect of shape of etching electrodes on the geometry of the microprobes developed. The variation in the geometry of copper wire electrode is observed to affect the probe length and its half cone angle (1.4 to 8.8˚). These developed probes were(0.58 usedmm to 2make.15 mm contact) on micro patterned metal° films and was used for electrical measurement along with semiconductor parameter analyzer. These probes show low contact resistance (~ 4 Ω) and follows Ohmic behavior. Such probes can be used for laboratories involved in teaching and multidisciplinary research activities and Atomic Force Microscopy. Keywords: electrochemical etching, tungsten tip, DC voltage, Low cost probe station. I. INTRODUCTION Advancement in the field of nanofabrication has led to miniaturization of devices to nanometers. Research labs and teaching efforts in the field of electronics and opto-electronic devices to such small dimensions, require probes for micron or smaller size. Additionally, these factors have limited the access of experts from various domains of science and engineering to explore nanoscale structures for multi-disciplinary applications. -

X-Ray Diffraction and Scanning Probe Microscopy
X-Ray Diffraction and Scanning Probe Microscopy X-Ray Diffraction Diffraction can occur when electromagnetic radiation interacts with a periodic structure whose repeat distance is about the same as the wavelength of the radiation. Visible light, for example, can be diffracted by a grating that contains scribed lines spaced only a few thousand angstroms apart, about the wavelength of visible light. X-rays have wavelengths on the order of angstroms, in the range of typical interatomic distances in crystalline solids. Therefore, X-rays can be diffracted from the repeating patterns of atoms that are characteristic of crystalline materials. Electromagnetic Properties of X-Rays The role of X-rays in diffraction experiments is based on the electromagnetic properties of this form of radiation. Electromagnetic radiation such as visible light and X-rays can sometimes behave as if the radiation were a beam of particles, while at other times it behaves as if it were a wave. If the energy emitted in the form of photons has a wavelength between 10-6 to 10-10 cm, then the energy is referred to as X-rays. Electromagnetic radiation can be regarded as a wave moving at the speed of light, c (~3 x 1010 cm/s in a vacuum), and having associated with it a wavelength, l , and a frequency, n, such that the relationship c = ln is satisfied. Gamma X-Rays Ultraviolet Visible Infrared Microwaves Radio rays rays light light Radar Waves Short Wavelength Long Wavelength High Frequency Low Frequency High Energy Low Energy V I B G Y O R 400 nm 700 nm Figure 1. -
Nanosurf Easyscan 2 STM Operating Instructions
Operating Instructions easyScan 2 STM Version 1.6 ‘NANOSURF’ AND THE NANOSURF LOGO ARE TRADEMARKS OF NANOSURF AG, REGIS- TERED AND/OR OTHERWISE PROTECTED IN VARIOUS COUNTRIES. © MAY 07 BY NANOSURF AG, SWITZERLAND, PROD.:BT02090, V1.6R0 Table of contents The easyScan 2 STM 9 Features...............................................................................................10 easyScan 2 Controller 10 Components of the system..................................................................12 Contents of the Tool set 14 Connectors, Indicators and Controls ...................................................15 The Scan head 15 The Controller 15 Installing the easyScan 2 STM 18 Installing the Hardware........................................................................18 Installing the Basic STM Package 18 Installing the Signal Module: S 19 Installing the Signal Module: A 19 Turning on the Controller 19 Storing the Instrument .........................................................................20 Installing the Software .........................................................................20 Step 1 - Installation of hardware drivers 22 Step 2 - Installation of the easyScan 2 software 28 Step 3 - Installation of DirectX 9 29 Installing the software on different computers 29 Preparing for Measurement 30 Initialising the Controller ......................................................................30 Preparing and installing the STM tip....................................................30 Installing the sample............................................................................33 -

Mapping the Unknown Atomic Force Microscopy and Other Scanning Probe Microscopy Techniques
Mapping the Unknown Atomic Force Microscopy and Other Scanning Probe Microscopy Techniques What it Atomic Force Microscopy and Scanning Probe Microscopy? Scanning Probe Microscopy is a general name for a set of techniques used to image atomic surfaces. With the help of Scanning Probe Microscopy technologies, scientists have been able to create images or “pictures” of atomic surfaces. With these technologies, we are able to “see” what atoms look like. There are a number of techniques. All of them employ some sort of probe that is run across the surface of a material to gather data. These probes usually measure some kind electrical and magnetic forces between the probe and atomic surface. This data is then used to create images of the surface. More in-depth information is contained in the Teacher Background section below. Unit Overview Imaging unknown surfaces is an important part of scientific research. It is often impossible or impractical to observe some surfaces directly. Surfaces of other planets, the ocean floor, and the atomic surfaces of objects must be observed and mapped indirectly. Accurate data gathering and the use of computers to put the data into a visual image are explored in this activity. In this activity, students gather data about an unknown surface inside a shoebox, record the data, and transform the data into 2D and 3D models of the unknown surface. If Microsoft Excel is available, students may also enter the data into a spreadsheet and create a 3D image. Remote imaging has long been used in the study of the ocean floor. Early in the history of oceanography, scientists would drop very long cables with weights attached to the end of the cable to the bottom of the ocean. -
Nanosurf IV: Traceable Measurement of Surface Texture at the Nanometre Level
NanoSurf IV: Traceable measurement of surface texture at the nanometre level by Richard Kenneth Leach BSC MSC MINSTP CPHYS MION A thesis submitted in partial fulfilment of the requirements for the degree of Doctor of Philosophy in Engineering University of Warwick, Centre for Nanotechnology and Microengineering, Department of Engineering February 2000 The Measurement of Surface Texture CHAPTER 1 THE MEASUREMENT OF SURFACE TEXTURE “[That] man is the measure of all things.” Protagoras (485 BC) 1.1 INTRODUCTION Whilst dimensions, shapes and other physical structures of engineering components can be unambiguously specified in terms of length or mass, the property of surface texture has an essentially qualitative aspect. A quantitative measurement can be assigned indirectly only by reference to instrumentation operating in accordance with geometric parameters. Surface texture is only just beginning to become a characteristic that can be exactly described and measured. As the fields of precision engineering and nanotechnology become a reality, the need for high-accuracy, truly measurable surface texture becomes more and more important. Today, most surface texture instruments are indirectly traceable to national standards. The use of transfer standards, such as step heights and sinusoidal gratings, whilst playing an important role in characterising an instrument’s performance, usually contributes significantly to the uncertainty of a given measurement. 1 The Measurement of Surface Texture This thesis describes a body of work that makes a major contribution towards developing a new traceable instrument for measuring surface texture: NanoSurf IV. The novel aspects of this research lie in the marriage of many ideas in precision instrument design with sound metrological principles. -

Fabrication of Sharp Atomic Force Microscope Probes Using In-Situ Local Electric Field Induced Deposition Under Ambient Conditions
The following article has been accepted by Review of Scientific Instruments (RSI). After it is published, it will be found at http://scitation.aip.org/content/aip/journal/rsi Fabrication of sharp atomic force microscope probes using in-situ local electric field induced deposition under ambient conditions Alexei Temiryazev1, a), Sergey I. Bozhko2, A. Edward Robinson3, and Marina Temiryazeva1 1Kotel’nikov Institute of Radioengineering and Electronics of RAS, Fryazino Branch, 141190 Fryazino, Russia 2Institute of Solid State Physics, RAS, 142432 Chernogolovka, Russia 3AIST-NT Inc. 359 Bel Marin Keys Blvd., Suite 20 Novato, CA 94949, USA We demonstrate a simple method to significantly improve the sharpness of standard silicon probes for an atomic force microscope, or to repair a damaged probe. The method is based on creating and maintaining a strong, spatially localized electric field in the air gap between the probe tip and the surface of conductive sample. Under these conditions, nanostructure growth takes place on both the sample and the tip. The most likely mechanism is the decomposition of atmospheric adsorbate with subsequent deposition of carbon structures. This makes it possible to grow a spike of a few hundred nanometers in length on the tip. We further demonstrate that probes obtained by this method can be used for high-resolution scanning. It is important to note that all process operations are carried out in-situ, in air and do not require the use of closed chambers or any additional equipment beyond the atomic force microscope itself. I. INTRODUCTION Currently, the vast majority of measurements made with atomic force microscopes, are carried out using silicon probes. -

Scanning Tunneling Microscopy (STM) Was Developed by Gerd Binnig and Heinrich Rohrer in the Early 80’S at the IBM Research Laboratory in Rüschlikon, Switzerland
Scanning Probe Microscopy 2008 IF1602 Materialfysik för E Pål Palmgren Niklas Elfström 2006 Scanning Probe Microscopy (SPM) Scanning probe microscopy (SPM) is the name for a class of microscopy techniques that offers spatial resolution down to a few Ångströms. This extreme resolution has led to a new understanding of the structure of materials and forms of life. With the help of scanning probe microscopy it is possible to look into the fascinating world of the atoms. SPM works without optical focusing elements, instead a sharp probe tip is scanned across a surface and probe-sample interactions are monitored to create an image of the surface. There are basically two types of microscopes, scanning tunnelling microscopy (STM) and atomic force microscopy (AFM). Scanning Tunneling Microscopy (STM) was developed by Gerd Binnig and Heinrich Rohrer in the early 80’s at the IBM research laboratory in Rüschlikon, Switzerland. For this revolutionary innovation Binnig and Rohrer were awarded the Nobel Prize in Physics in 1986. In STM, a small sharp conducting tip is scanned across the sample’s surface, so close that a tunnel current can flow. With the help of that current the tip-surface distance can be controlled with such precision that the atomic arrangement of metallic or semiconducting surfaces can be determined. STM is restricted to electrically conducting surfaces. A further development of STM called Atomic Force Microscopy (AFM) was developed by Gerd Binnig, Calvin Quate and Christoph Gerber. AFM extends the abilities of the STM to include electrically insulating materials. Instead of measuring a tunnel current atomic-range forces between tip and sample surface are measured.