Power Semiconductor Devices
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-
Power-Devices.Pdf
Power Devices Outline 1.1 Need for semiconductor power devices, 1.2 Power MOSFET (Qualitative) 1.3 Introduction to family of thyristors. 1.4 Silicon Controlled Rectifier (SCR)- structure, I-Vcharacteristics, Turn-On and Turn-Off characteristics, ratings 1.5 Gate-triggering circuits. 1.6 Diac and Triac- Basic structure, working and V-I characteristics. 1.7 Application of Diac as a triggering device for Triac. 1.1 Need for semiconductor power devices 1) The concept and features Power electronic devices: are the electronic devices that can be directly used in the power processing circuits to convert or control electric power. Vacuum devices: Mercury arc rectifier thyratron, etc. seldom In broad sense in use today Power electronic devices Semiconductor devices: major power electronic devices Very often: Power electronic devices= Power semiconductor devices Major material used in power semiconductor devices——Silicon Features of power electronic devices a) The electric power that power electronic device deals with is usually much larger than that the information electronic device does. b) Usually working in switching states to reduce power losses On-state Voltage across the device is 0 p=vi=0 V=0 Off-state Current through the device is 0 p=vi=0 i=0 c)Need to be controlled by information electronic circuits. d)Very often, drive circuits are necessary to interface between information circuits and power circuits. e)Dissipated power loss usually larger than information electronic devices —special packaging and heat sink are necessary. 2) Configuration of systems using power electronic devices Power electronic system: Electric isolation: optical, magnetic Control circuit (in a broad sense) detection circuit Power circuit (power Control stage, main circuit) circuit drive circuit Protection circuit is alsocircuit very often used in power electronic system especially for the expensive power semiconductors. -

Unijunction Transistor
ELEC-SPD-S2 Credits: www.electronics-tutorials.ws 1/6 Home / Power Electronics / Unijunction Transistor Unijunction Transistor The UJT is a three-terminal, semiconductor device which exhibits negative resistance and switching characteristics for use as a relaxation oscillator in phase control applications The Unijunction Transistor or UJT for short, is another solid state three terminal device that can be used in gate pulse, timing circuits and trigger generator applications to switch and control either thyristors and triac’s for AC power control type applications. Like diodes, unijunction transistors are constructed from separate P-type and N-type semiconductor materials forming a single (hence its name Uni-Junction) PN-junction within the main conducting N-type channel of the device. Although the Unijunction Transistor has the name of a transistor, its switching characteristics are very different from those of a conventional bipolar or field effect transistor as it can not be used to amplify a signal but instead is used as a ON-OFF switching transistor. UJT’s have unidirectional conductivity and negative impedance characteristics acting more like a variable voltage divider during breakdown. Like N-channel FET’s, the UJT consists of a single solid piece of N-type semiconductor material forming the main current carrying channel with its two outer connections marked as Base 2 ( B2 ) and Base 1 ( B1 ). The third connection, confusingly marked as the Emitter ( E ) is located along the channel. The emitter terminal is / represented by an arrow pointing from the P-type emitter to the N-type base. The Emitter rectifying p-n junction of the unijunction transistor is formed by fusing the P-type material into the N-type silicon channel. -

Power Electronics
POWER ELECTRONICS Ques.1. A Silicon Controlled Rectifier (SCR) Is A 1. Unijunction Device 2. Device With Three Junction 3. Device With Four Junction 4. None Of The Above Answer.2. Device With Three Junction Ques.2. A Thyristor Is Basically 1. PNPN Device 2. A Combination Of Diac And Triac 3. A Set Of Scrs 4. A Set Of SCR, Diac And A Triac Answer.1. PNPN Device Ques.3. Which Semiconductor Power Device Out Of The Following, Is Not A Current Triggering Device? 1. Thyristor 2. Triac 3. G.T.O 4. MOSFET Answer.4. MOSFET Ques.4. Which Of The Following Device Incorporates A Terminal For Synchronizing Purposes? 1. Diac 2. Triac 3. SUS 4. None Of The Above Answer.3. SUS Ques.5. The Advantages Of SCS Over SCR Is 1. Slow Switching Time And Large VH 2. Slow Switching Time And Smallervh 3. Faster Switching Time And Smallervh 4. Faster Switching Time And Large VH Answer.3. Faster Switching Time And Smallervh Ques.6. A Thyristor Equivalent Of A Thyratron Tube Is A 1. Diac 2. Triac 3. Silicon Controlled Rectifier 4. None Of The Above Hide Explanation Answer.3. Silicon Controlled Rectifier Ques.7. A Triac Is A 1. 2 Terminal Switch 2. 2 Terminal Bilateral Switch 3. 3 Terminal Bilateral Switch 4. 3 Terminal Bidirectional Switch Answer.4. 3 Terminal Bidirectional Switch Ques.8. The Fig. Below Represents A 1. Triac Thyristor 2. Diac Trigger 3. Diode Rectifier 4. None Of The Above Hide Explanation Answer.2. Diac Trigger Ques.9. The Triple Frequency Of A Six-Phase Half Wave Rectifier For 220 V, 60 Hz Input Will Be 1. -
ON Thyristor Application Note
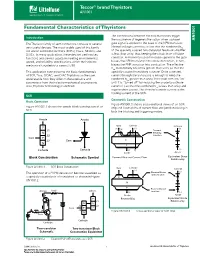
Teccor® brand Thyristors AN1001 Fundamental Characteristics of Thyristors The connections between the two transistors trigger Introduction the occurrence of regenerative action when a proper AN1001 The Thyristor family of semiconductors consists of several gate signal is applied to the base of the NPN transistor. very useful devices. The most widely used of this family Normal leakage current is so low that the combined hFE are silicon controlled rectifiers (SCRs), Triacs, SIDACs, and of the specially coupled two-transistor feedback amplifier DIACs. In many applications these devices perform key is less than unity, thus keeping the circuit in an off-state functions and are real assets in meeting environmental, condition. A momentary positive pulse applied to the gate speed, and reliability specifications which their electro- biases the NPN transistor into conduction which, in turn, mechanical counterparts cannot fulfill. biases the PNP transistor into conduction. The effective hFE momentarily becomes greater than unity so that the This application note presents the basic fundamentals specially coupled transistors saturate. Once saturated, of SCR, Triac, SIDAC, and DIAC Thyristors so the user current through the transistors is enough to keep the understands how they differ in characteristics and combined hFE greater than unity. The circuit remains “on” parameters from their electro-mechanical counterparts. until it is “turned off” by reducing the anode-to-cathode Also, Thyristor terminology is defined. current (IT) so that the combined hFE is less than unity and regeneration ceases. This threshold anode current is the holding current of the SCR. SCR Geometric Construction Basic Operation Figure AN1001.3 shows cross-sectional views of an SCR Figure AN1001.1 shows the simple block construction of an chip and illustrations of current flow and junction biasing in SCR. -

UNIT - I INTRODUCTION to THYRISTORS and OTHER POWER ELECTRONICS
1 POWER ELECTRONICS UNIT - I INTRODUCTION To THYRISTORS AND OTHER POWER ELECTRONICS UNIT - I Power Electronics & its Roll : Power electronics is a technology that deals with the conversion and control of electrical power with high-efficiency switching mode electronic devices for a wide range of applications. Power electronics makes it possible to transport electricity over long distances with minimum losses, which is accomplished by Power Converters. Power Converters convert alternating current (AC) into high-voltage direct current (HVDC) and vice-versa Power Electronics Devices are also used many applications like speed control of AC / DC Motors, electrochemical process, heating and lighting control, electronic welding, power line volt–ampere reactive (VAR) and harmonic compensators, high-frequency (HF) heating, and motor drives. Silicon Controlled Rectifier ( SCR ) / Thyristor A silicon controlled rectifier is a four-layer solid state current-controlling device which control high Voltage and Power. A SCR is device / component have three terminals namely anode (A), cathode (K), Gate (G), four Layers P-N-P-N, and three Junctions J 1, J 2, J 3 . It allows the current in one direction from Anode to Cathode only and the Gate controls the flow of current between the Anode and Cathode. The primary function of SCR / Thyristor is to control electric power and current by acting as a switch. Figure shows the Construction & Symbol of SCR: 2 POWER ELECTRONICS UNIT - I INTRODUCTION To THYRISTORS AND OTHER POWER ELECTRONICS SCR V-I Characteristics Forward Characteristics When Anode is positive with respect to Cathode, the curve between V and I is called the forward characteristics. -

Scrs, Triacs & Ssrs
Electus Distribution Reference Data Sheet: SCRTRIAC.PDF (1) SCRs, Triacs & SSRs A Primer Silicon controlled rectifiers (SCRs), Triacs and one Because of this internal feedback action, the basic main type of solid state relay (SSR) are all members of a PNPN structure has an interesting property: it can family of very handy semiconductor devices known operate in either of two very different, but equally collectively as thyristors. Other members of the same stable states. In one state it passes only a very tiny family of devices are the Shockley diode, the leakage current, rather like a reverse-biased PN diode. programmable unijunction or PUT and the gate-turnoff This is known as the blocking or off state. switch or GTO. In this datasheet well give you an In the other state it can conduct quite heavily, rather introduction to these devices, the way they work and like a forward-biased diode or a transistor that is driven how theyre used. Well also talk a bit about the Diac, into saturation. Not surprisingly this state is known as which although not really a thyristor is often used with the conducting or on state. them as a triggering device. Now lets see how these two states are possible, and The main characteristics of thyristor devices are that: how the PNPN structure can be made to flip from one l Theyre all based on the semiconductor material state to the other, so it can be used as an electronic silicon; switch. l Theyre all essentially designed for switching, rather If its connected in series with a load (say an than linear current -

Power Electronics � 577 Power Electronics
21 Power Electronics 577 Power Electronics 21.1 Power Electronics 21.2 The Triac 21.3 Triac Construction 21.4 SCR Equivalent Circuit of Triac 21.5 Triac Operation 21.6 Triac Characteristics 21.7 Triac Phase Control Circuit 21.8 Applications of Triac 21.9 The Diac 21.10 Applications of Diac 21.11 Unijunction Transistor (UJT) 21.12 Equivalent Circuit of a UJT 21.13 Characteristics of UJT 21.14 Advantages of UJT 21.15 Applications of UJT INTRODUCTION ince the 1950’s there has been a great upsurge in the development, production and applications of semiconductor devices. Today there are well over 100 million semiconductor devices manu- Sfactured in a year. These figures alone indicate how important semiconductor devices have become to the electrical industry. In fact, the present day advancement in technology is largely attributed to the widespread use of semiconductor devices in the commercial and industrial fields. One major field of application of semiconductor devices in the recent years has been to control large blocks of power flow in a system. This has led to the development of a new branch of engineer- ing called power electronics. The purpose of this chapter is to acquaint the readers with some impor- tant switching devices much used in power electronics. 21.1 Power Electronics The branch of electronics which deals with the control of power at 50 Hz (i.e. supply frequency) is known as power electronics. 578 Principles of Electronics There are many applications where it is desired to control (or regulate) the power fed to a load e.g.