Linux W1 Documentation
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-
Lecture 9: Data Storage and IO Models Lecture 9
Lecture 9 Lecture 9: Data Storage and IO Models Lecture 9 Announcements • Submission Project Part 1 tonight • Instructions on Piazza! • PS2 due on Friday at 11:59 pm • Questions? Easier than PS1. • Badgers Rule! Lecture 9 Today’s Lecture 1. Data Storage 2. Disk and Files 3. Buffer Manager - Prelims 3 Lecture 9 > Section 1 1. Data Storage 4 Lecture 9 > Section 1 What you will learn about in this section 1. Life cycle of a query 2. Architecture of a DBMS 3. Memory Hierarchy 5 Lecture 9 > Section 1 Life cycle of a query Query Result Query Database Server Query Execute Parser Optimizer Select R.text from |…|……|………..|………..| Report R, Weather W |…|……|………..|………..| where W.image.rain() Scheduler Operators |…|……|………..|………..| and W.city = R.city |…|……|………..|………..| and W.date = R.date |…|……|………..|………..| and |…|……|………..|………..| R.text. |…|……|………..|………..| matches(“insurance claims”) |…|……|………..|………..| |…|……|………..|………..| |…|……|………..|………..| |…|……|………..|………..| Query Query Syntax Tree Query Plan Result Segments 6 Lecture 9 > Section 1 > Architecture of a DBMS Internal Architecture of a DBMS query Query Execution data access Storage Manager I/O access 7 Lecture 9 > Section 1 > Storage Manager Architecture of a Storage Manager Access Methods Sorted File Hash Index B+-tree Heap File Index Manager Buffer Manager Recovery Manager Concurrency Control I/O Manager IO Accesses In Systems, IO cost matters a ton! 8 Lecture 9 > Section 1 > Data Storage Data Storage • How does a DBMS store and access data? • main memory (fast, temporary) • disk (slow, permanent) • How -

System Calls System Calls
System calls We will investigate several issues related to system calls. Read chapter 12 of the book Linux system call categories file management process management error handling note that these categories are loosely defined and much is behind included, e.g. communication. Why? 1 System calls File management system call hierarchy you may not see some topics as part of “file management”, e.g., sockets 2 System calls Process management system call hierarchy 3 System calls Error handling hierarchy 4 Error Handling Anything can fail! System calls are no exception Try to read a file that does not exist! Error number: errno every process contains a global variable errno errno is set to 0 when process is created when error occurs errno is set to a specific code associated with the error cause trying to open file that does not exist sets errno to 2 5 Error Handling error constants are defined in errno.h here are the first few of errno.h on OS X 10.6.4 #define EPERM 1 /* Operation not permitted */ #define ENOENT 2 /* No such file or directory */ #define ESRCH 3 /* No such process */ #define EINTR 4 /* Interrupted system call */ #define EIO 5 /* Input/output error */ #define ENXIO 6 /* Device not configured */ #define E2BIG 7 /* Argument list too long */ #define ENOEXEC 8 /* Exec format error */ #define EBADF 9 /* Bad file descriptor */ #define ECHILD 10 /* No child processes */ #define EDEADLK 11 /* Resource deadlock avoided */ 6 Error Handling common mistake for displaying errno from Linux errno man page: 7 Error Handling Description of the perror () system call. -
System Calls and I/O
System Calls and I/O CS 241 January 27, 2012 Copyright ©: University of Illinois CS 241 Staff 1 This lecture Goals Get you familiar with necessary basic system & I/O calls to do programming Things covered in this lecture Basic file system calls I/O calls Signals Note: we will come back later to discuss the above things at the concept level Copyright ©: University of Illinois CS 241 Staff 2 System Calls versus Function Calls? Copyright ©: University of Illinois CS 241 Staff 3 System Calls versus Function Calls Function Call Process fnCall() Caller and callee are in the same Process - Same user - Same “domain of trust” Copyright ©: University of Illinois CS 241 Staff 4 System Calls versus Function Calls Function Call System Call Process Process fnCall() sysCall() OS Caller and callee are in the same Process - Same user - OS is trusted; user is not. - Same “domain of trust” - OS has super-privileges; user does not - Must take measures to prevent abuse Copyright ©: University of Illinois CS 241 Staff 5 System Calls System Calls A request to the operating system to perform some activity System calls are expensive The system needs to perform many things before executing a system call The computer (hardware) saves its state The OS code takes control of the CPU, privileges are updated. The OS examines the call parameters The OS performs the requested function The OS saves its state (and call results) The OS returns control of the CPU to the caller Copyright ©: University of Illinois CS 241 Staff 6 Steps for Making a System Call -

The Power Supply Subsystem
The Power Supply Subsystem Sebastian Reichel Collabora October 24, 2018 Open First Sebastian Reichel I Embedded Linux engineer at Collabora I Open Source Consultancy I Based in Oldenburg, Germany I Open Source contributor I Debian Developer I HSI and power-supply subsystem maintainer I Cofounder of Oldenburg's Hack(er)/Makerspace Open First The power-supply subsystem I batteries / fuel gauges I chargers I (board level poweroff/reset) I Originally written and maintained by Anton Vorontsov (2007-2014) Created by Blink@design from the Noun Project Created by Jenie Tomboc I Temporarily maintained by Dmitry from the Noun Project Eremin-Solenikov (2014) Open First Userspace Interface root@localhost# ls /sys/class/power_supply/ AC BAT0 BAT1 root@localhost# ls /sys/class/power_supply/BAT0 alarm energy_full_design status capacity energy_now subsystem capacity_level manufacturer technology charge_start_threshold model_name type charge_stop_threshold power uevent cycle_count power_now voltage_min_design ... root@localhost# cat /sys/class/power_supply/BAT0/capacity 65 Open First Userspace Interface root@localhost# udevadm info /sys/class/power_supply/BAT0 E: POWER_SUPPLY_CAPACITY=79 E: POWER_SUPPLY_ENERGY_FULL=15200000 E: POWER_SUPPLY_ENERGY_FULL_DESIGN=23200000 E: POWER_SUPPLY_ENERGY_NOW=12010000 E: POWER_SUPPLY_POWER_NOW=5890000 E: POWER_SUPPLY_STATUS=Discharging E: POWER_SUPPLY_VOLTAGE_MIN_DESIGN=11100000 E: POWER_SUPPLY_VOLTAGE_NOW=11688000 ... Open First Userspace Interface I one power-supply device = one physical device I All values are in uV, -

Ext4 File System and Crash Consistency
1 Ext4 file system and crash consistency Changwoo Min 2 Summary of last lectures • Tools: building, exploring, and debugging Linux kernel • Core kernel infrastructure • Process management & scheduling • Interrupt & interrupt handler • Kernel synchronization • Memory management • Virtual file system • Page cache and page fault 3 Today: ext4 file system and crash consistency • File system in Linux kernel • Design considerations of a file system • History of file system • On-disk structure of Ext4 • File operations • Crash consistency 4 File system in Linux kernel User space application (ex: cp) User-space Syscalls: open, read, write, etc. Kernel-space VFS: Virtual File System Filesystems ext4 FAT32 JFFS2 Block layer Hardware Embedded Hard disk USB drive flash 5 What is a file system fundamentally? int main(int argc, char *argv[]) { int fd; char buffer[4096]; struct stat_buf; DIR *dir; struct dirent *entry; /* 1. Path name -> inode mapping */ fd = open("/home/lkp/hello.c" , O_RDONLY); /* 2. File offset -> disk block address mapping */ pread(fd, buffer, sizeof(buffer), 0); /* 3. File meta data operation */ fstat(fd, &stat_buf); printf("file size = %d\n", stat_buf.st_size); /* 4. Directory operation */ dir = opendir("/home"); entry = readdir(dir); printf("dir = %s\n", entry->d_name); return 0; } 6 Why do we care EXT4 file system? • Most widely-deployed file system • Default file system of major Linux distributions • File system used in Google data center • Default file system of Android kernel • Follows the traditional file system design 7 History of file system design 8 UFS (Unix File System) • The original UNIX file system • Design by Dennis Ritche and Ken Thompson (1974) • The first Linux file system (ext) and Minix FS has a similar layout 9 UFS (Unix File System) • Performance problem of UFS (and the first Linux file system) • Especially, long seek time between an inode and data block 10 FFS (Fast File System) • The file system of BSD UNIX • Designed by Marshall Kirk McKusick, et al. -

File Handling in Python
hapter C File Handling in 2 Python There are many ways of trying to understand programs. People often rely too much on one way, which is called "debugging" and consists of running a partly- understood program to see if it does what you expected. Another way, which ML advocates, is to install some means of understanding in the very programs themselves. — Robin Milner In this Chapter » Introduction to Files » Types of Files » Opening and Closing a 2.1 INTRODUCTION TO FILES Text File We have so far created programs in Python that » Writing to a Text File accept the input, manipulate it and display the » Reading from a Text File output. But that output is available only during » Setting Offsets in a File execution of the program and input is to be entered through the keyboard. This is because the » Creating and Traversing a variables used in a program have a lifetime that Text File lasts till the time the program is under execution. » The Pickle Module What if we want to store the data that were input as well as the generated output permanently so that we can reuse it later? Usually, organisations would want to permanently store information about employees, inventory, sales, etc. to avoid repetitive tasks of entering the same data. Hence, data are stored permanently on secondary storage devices for reusability. We store Python programs written in script mode with a .py extension. Each program is stored on the secondary device as a file. Likewise, the data entered, and the output can be stored permanently into a file. -

System Calls and Standard I/O
System Calls and Standard I/O Professor Jennifer Rexford http://www.cs.princeton.edu/~jrex 1 Goals of Today’s Class • System calls o How a user process contacts the Operating System o For advanced services that may require special privilege • Standard I/O library o Generic I/O support for C programs o A smart wrapper around I/O-related system calls o Stream concept, line-by-line input, formatted output, ... 2 1 System Calls 3 Communicating With the OS User Process signals systems calls Operating System • System call o Request to the operating system to perform a task o … that the process does not have permission to perform • Signal o Asynchronous notification sent to a process … to notify the process of an event that has occurred o 4 2 Processor Modes • The OS must restrict what a user process can do o What instructions can execute o What portions of the address space are accessible • Supervisor mode (or kernel mode) o Can execute any instructions in the instruction set – Including halting the processor, changing mode bit, initiating I/O o Can access any memory location in the system – Including code and data in the OS address space • User mode o Restricted capabilities – Cannot execute privileged instructions – Cannot directly reference code or data in OS address space o Any such attempt results in a fatal “protection fault” – Instead, access OS code and data indirectly via system calls 5 Main Categories of System Calls • File system o Low-level file I/O o E.g., creat, open, read, write, lseek, close • Multi-tasking mechanisms o Process -
![[13주차] Sysfs and Procfs](https://docslib.b-cdn.net/cover/8218/13-sysfs-and-procfs-338218.webp)
[13주차] Sysfs and Procfs
1 7 Computer Core Practice1: Operating System Week13. sysfs and procfs Jhuyeong Jhin and Injung Hwang Embedded Software Lab. Embedded Software Lab. 2 sysfs 7 • A pseudo file system provided by the Linux kernel. • sysfs exports information about various kernel subsystems, HW devices, and associated device drivers to user space through virtual files. • The mount point of sysfs is usually /sys. • sysfs abstrains devices or kernel subsystems as a kobject. Embedded Software Lab. 3 How to create a file in /sys 7 1. Create and add kobject to the sysfs 2. Declare a variable and struct kobj_attribute – When you declare the kobj_attribute, you should implement the functions “show” and “store” for reading and writing from/to the variable. – One variable is one attribute 3. Create a directory in the sysfs – The directory have attributes as files • When the creation of the directory is completed, the directory and files(attributes) appear in /sys. • Reference: ${KERNEL_SRC_DIR}/include/linux/sysfs.h ${KERNEL_SRC_DIR}/fs/sysfs/* • Example : ${KERNEL_SRC_DIR}/kernel/ksysfs.c Embedded Software Lab. 4 procfs 7 • A special filesystem in Unix-like operating systems. • procfs presents information about processes and other system information in a hierarchical file-like structure. • Typically, it is mapped to a mount point named /proc at boot time. • procfs acts as an interface to internal data structures in the kernel. The process IDs of all processes in the system • Kernel provides a set of functions which are designed to make the operations for the file in /proc : “seq_file interface”. – We will create a file in procfs and print some data from data structure by using this interface. -

Your Performance Task Summary Explanation
Lab Report: 11.2.5 Manage Files Your Performance Your Score: 0 of 3 (0%) Pass Status: Not Passed Elapsed Time: 6 seconds Required Score: 100% Task Summary Actions you were required to perform: In Compress the D:\Graphics folderHide Details Set the Compressed attribute Apply the changes to all folders and files In Hide the D:\Finances folder In Set Read-only on filesHide Details Set read-only on 2017report.xlsx Set read-only on 2018report.xlsx Do not set read-only for the 2019report.xlsx file Explanation In this lab, your task is to complete the following: Compress the D:\Graphics folder and all of its contents. Hide the D:\Finances folder. Make the following files Read-only: D:\Finances\2017report.xlsx D:\Finances\2018report.xlsx Complete this lab as follows: 1. Compress a folder as follows: a. From the taskbar, open File Explorer. b. Maximize the window for easier viewing. c. In the left pane, expand This PC. d. Select Data (D:). e. Right-click Graphics and select Properties. f. On the General tab, select Advanced. g. Select Compress contents to save disk space. h. Click OK. i. Click OK. j. Make sure Apply changes to this folder, subfolders and files is selected. k. Click OK. 2. Hide a folder as follows: a. Right-click Finances and select Properties. b. Select Hidden. c. Click OK. 3. Set files to Read-only as follows: a. Double-click Finances to view its contents. b. Right-click 2017report.xlsx and select Properties. c. Select Read-only. d. Click OK. e. -
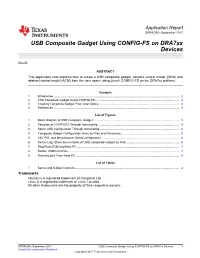
USB Composite Gadget Using CONFIG-FS on Dra7xx Devices
Application Report SPRACB5–September 2017 USB Composite Gadget Using CONFIG-FS on DRA7xx Devices RaviB ABSTRACT This application note explains how to create a USB composite gadget, network control model (NCM) and abstract control model (ACM) from the user space using Linux® CONFIG-FS on the DRA7xx platform. Contents 1 Introduction ................................................................................................................... 2 2 USB Composite Gadget Using CONFIG-FS ............................................................................. 3 3 Creating Composite Gadget From User Space.......................................................................... 4 4 References ................................................................................................................... 8 List of Figures 1 Block Diagram of USB Composite Gadget............................................................................... 3 2 Selection of CONFIGFS Through menuconfig........................................................................... 4 3 Select USB Configuration Through menuconfig......................................................................... 4 4 Composite Gadget Configuration Items as Files and Directories ..................................................... 5 5 VID, PID, and Manufacturer String Configuration ....................................................................... 6 6 Kernel Logs Show Enumeration of USB Composite Gadget by Host ................................................ 6 7 Ping -
File Permissions Do Not Restrict Root
Filesystem Security 1 General Principles • Files and folders are managed • A file handle provides an by the operating system opaque identifier for a • Applications, including shells, file/folder access files through an API • File operations • Access control entry (ACE) – Open file: returns file handle – Allow/deny a certain type of – Read/write/execute file access to a file/folder by – Close file: invalidates file user/group handle • Access control list (ACL) • Hierarchical file organization – Collection of ACEs for a – Tree (Windows) file/folder – DAG (Linux) 2 Discretionary Access Control (DAC) • Users can protect what they own – The owner may grant access to others – The owner may define the type of access (read/write/execute) given to others • DAC is the standard model used in operating systems • Mandatory Access Control (MAC) – Alternative model not covered in this lecture – Multiple levels of security for users and documents – Read down and write up principles 3 Closed vs. Open Policy Closed policy Open Policy – Also called “default secure” • Deny Tom read access to “foo” • Give Tom read access to “foo” • Deny Bob r/w access to “bar” • Give Bob r/w access to “bar • Tom: I would like to read “foo” • Tom: I would like to read “foo” – Access denied – Access allowed • Tom: I would like to read “bar” • Tom: I would like to read “bar” – Access allowed – Access denied 4 Closed Policy with Negative Authorizations and Deny Priority • Give Tom r/w access to “bar” • Deny Tom write access to “bar” • Tom: I would like to read “bar” – Access -
W4118: File Systems
W4118: file systems Instructor: Junfeng Yang References: Modern Operating Systems (3rd edition), Operating Systems Concepts (8th edition), previous W4118, and OS at MIT, Stanford, and UWisc Outline File system concepts . What is a file? . What operations can be performed on files? . What is a directory and how is it organized? File implementation . How to allocate disk space to files? 1 What is a file User view . Named byte array • Types defined by user . Persistent across reboots and power failures OS view . Map bytes as collection of blocks on physical storage . Stored on nonvolatile storage device • Magnetic Disks 2 Role of file system Naming . How to “name” files . Translate “name” + offset logical block # Reliability . Must not lose file data Protection . Must mediate file access from different users Disk management . Fair, efficient use of disk space . Fast access to files 3 File metadata Name – only information kept in human-readable form Identifier – unique tag (number) identifies file within file system (inode number in UNIX) Location – pointer to file location on device Size – current file size Protection – controls who can do reading, writing, executing Time, date, and user identification – data for protection, security, and usage monitoring How is metadata stored? (inode in UNIX) 4 File operations int creat(const char* pathname, mode_t mode) int unlink(const char* pathname) int rename(const char* oldpath, const char* newpath) int open(const char* pathname, int flags, mode_t mode) int read(int fd, void* buf, size_t count); int write(int fd, const void* buf, size_t count) int lseek(int fd, offset_t offset, int whence) int truncate(const char* pathname, offset_t len) ..