Virtual Human Modelling and Animation for Real-Time Sign Language Visualisation
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Unit 31: Computer Animation
Unit 31: Computer Animation Unit code: D/601/7658 QCF Level 3: BTEC National Credit value: 10 Guided learning hours: 60 Aim and purpose The aim of this unit is to ensure learners understand types of animation and their uses and develop the knowledge and skills required to use software techniques to design and implement different types of animation. Unit introduction Computer animation is the art of creating moving images through the use of computers. It brings together computer graphics and animation techniques. Animation does not require computers, however the increasing ability of computers to create and manipulate sets of images has allowed basic animation to reach new levels of sophistication and realism. To create the illusion of movement, a sequence of images is displayed over time and the human eye perceives this sequence as continual movement. The technique is at the heart of all existing technologies such as television and motion pictures. It is increasingly created by means of 3D computer graphics, although 2D computer graphics are still widely used for low bandwidth and faster real-time needs. Only 2D graphics are required in this unit. Animation has become a prominent feature of the worldwide web and is used to create interest and attract attention. In this area, however, there are other factors that need to be taken into account when designing and building applications, such as the nature of the display device and the bandwidth of the connection. As with all computer applications learners must first identify the need, specific requirements and constraints before building the solution. Learners will start by looking at different types of animation and their uses and formats. -

Procedural Content Generation for Games
Procedural Content Generation for Games Inauguraldissertation zur Erlangung des akademischen Grades eines Doktors der Naturwissenschaften der Universit¨atMannheim vorgelegt von M.Sc. Jonas Freiknecht aus Hannover Mannheim, 2020 Dekan: Dr. Bernd L¨ubcke, Universit¨atMannheim Referent: Prof. Dr. Wolfgang Effelsberg, Universit¨atMannheim Korreferent: Prof. Dr. Colin Atkinson, Universit¨atMannheim Tag der m¨undlichen Pr¨ufung: 12. Februar 2021 Danksagungen Nach einer solchen Arbeit ist es nicht leicht, alle Menschen aufzuz¨ahlen,die mich direkt oder indirekt unterst¨utzthaben. Ich versuche es dennoch. Allen voran m¨ochte ich meinem Doktorvater Prof. Wolfgang Effelsberg danken, der mir - ohne mich vorher als Master-Studenten gekannt zu haben - die Promotion an seinem Lehrstuhl erm¨oglichte und mit Geduld, Empathie und nicht zuletzt einem mir unbegreiflichen Verst¨andnisf¨ur meine verschiedenen Ausfl¨ugein die Weiten der Informatik unterst¨utzthat. Sie werden mir nicht glauben, wie dankbar ich Ihnen bin. Weiterhin m¨ochte ich meinem damaligen Studiengangsleiter Herrn Prof. Heinz J¨urgen M¨ullerdanken, der vor acht Jahren den Kontakt zur Universit¨atMannheim herstellte und mich ¨uberhaupt erst in die richtige Richtung wies, um mein Promotionsvorhaben anzugehen. Auch Herr Prof. Peter Henning soll nicht ungenannt bleiben, der mich - auch wenn es ihm vielleicht gar nicht bewusst ist - davon ¨uberzeugt hat, dass die Erzeugung virtueller Welten ein lohnenswertes Promotionsthema ist. Ganz besonderer Dank gilt meiner Frau Sarah und meinen beiden Kindern Justus und Elisa, die viele Abende und Wochenenden zugunsten dieser Arbeit auf meine Gesellschaft verzichten mussten. Jetzt ist es geschafft, das n¨achste Projekt ist dann wohl der Garten! Ebenfalls geb¨uhrt meinen Eltern und meinen Geschwistern Dank. -

Making a Game Character Move
Piia Brusi MAKING A GAME CHARACTER MOVE Animation and motion capture for video games Bachelor’s thesis Degree programme in Game Design 2021 Author (authors) Degree title Time Piia Brusi Bachelor of Culture May 2021 and Arts Thesis title 69 pages Making a game character move Animation and motion capture for video games Commissioned by South Eastern Finland University of Applied Sciences Supervisor Marko Siitonen Abstract The purpose of this thesis was to serve as an introduction and overview of video game animation; how the interactive nature of games differentiates game animation from cinematic animation, what the process of producing game animations is like, what goes into making good game animations and what animation methods and tools are available. The thesis briefly covered other game design principles most relevant to game animators: game design, character design, modelling and rigging and how they relate to game animation. The text mainly focused on animation theory and practices based on commentary and viewpoints provided by industry professionals. Additionally, the thesis described various 3D animation and motion capture systems and software in detail, including how motion capture footage is shot and processed for games. The thesis ended on a step-by-step description of the author’s motion capture cleanup project, where a jog loop was created out of raw motion capture data. As the topic of game animation is vast, the thesis could not cover topics such as facial motion capture and procedural animation in detail. Technologies such as motion matching, machine learning and range imaging were also suggested as topics worth covering in the future. -

Comparative Analysis of Human Modeling Tools Emilie Poirson, Mathieu Delangle
Comparative analysis of human modeling tools Emilie Poirson, Mathieu Delangle To cite this version: Emilie Poirson, Mathieu Delangle. Comparative analysis of human modeling tools. International Digital Human Modeling Symposium, Jun 2013, Ann Arbor, United States. hal-01240890 HAL Id: hal-01240890 https://hal.archives-ouvertes.fr/hal-01240890 Submitted on 24 Dec 2015 HAL is a multi-disciplinary open access L’archive ouverte pluridisciplinaire HAL, est archive for the deposit and dissemination of sci- destinée au dépôt et à la diffusion de documents entific research documents, whether they are pub- scientifiques de niveau recherche, publiés ou non, lished or not. The documents may come from émanant des établissements d’enseignement et de teaching and research institutions in France or recherche français ou étrangers, des laboratoires abroad, or from public or private research centers. publics ou privés. Comparative analysis of human modeling tools Emilie Poirson & Matthieu Delangle LUNAM, IRCCYN, Ecole Centrale de Nantes, France April 25, 2013 Abstract sometimes a multitude of functions that are not suitable for his application case. Digital Human Modeling tools simulate a task performed by a human in a virtual environment and provide useful The first step of our study consisted in listing all indicators for ergonomic, universal design and represen- the comparable software and to select the comparison tation of product in situation. The latest developments criteria. Then a list of indicators is proposed, in three in this field are in terms of appearance, behaviour and major categories: degree of realism, functions and movement. With the considerable increase of power com- environment. Based on software use, literature searches puters,some of these programs incorporate a number of [7] and technical reports ([8], [9], [10], for example), the key details that make the result closer and closer to a real table of indicator is filled and coded from text to a quinary situation. -
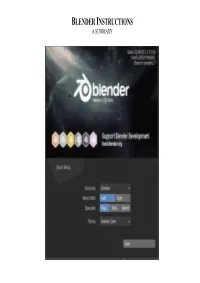
Blender Instructions a Summary
BLENDER INSTRUCTIONS A SUMMARY Attention all Mac users The first step for all Mac users who don’t have a three button mouse and/or a thumb wheel on the mouse is: 1.! Go under Edit menu 2.! Choose Preferences 3.! Click the Input tab 4.! Make sure there is a tick in the check boxes for “Emulate 3 Button Mouse” and “Continuous Grab”. 5.! Click the “Save As Default” button. This will allow you to navigate 3D space and move objects with a trackpad or one-mouse button and the keyboard. Also, if you prefer (but not critical as you do have the View menu to perform the same functions), you can emulate the numpad (the extra numbers on the right of extended keyboard devices). It means the numbers across the top of the standard keyboard will function the same way as the numpad. 1.! Go under Edit menu 2.! Choose Preferences 3. Click the Input tab 4.! Make sure there is a tick in the check box for “Emulate Numpad”. 5.! Click the “Save As Default” button. BLENDER BASIC SHORTCUT KEYS OBJECT MODE SHORTCUT KEYS EDIT MODE SHORTCUT KEYS The Interface The interface of Blender (version 2.8 and higher), is comprised of: 1. The Viewport This is the 3D scene showing you a default 3D object called a cube and a large mesh-like grid called the plane for helping you to visualize the X, Y and Z directions in space. And to save time, in Blender 2.8, the camera (left) and light (right in the distance) has been added to the viewport as default. -
Christian Otten
CHRISTIAN OTTEN 3D GENERALIST PORTFOLIO 2018 Demo Scene - Apothecary Modelled with Maya | ngplant 2017 Rendered with Corona for C4D Compositing with Nuke demo scene - sector 51 Modelled with Maya | Cinema 4D 2017 Rendered with Corona for C4D Compositing with After Effects (Lens Flares) and Nuke demo scene - wynyard Modelled with Maya | zBrush | ngplant 2017 Rendered with Vray (Raven) and Corona Compositing with Nuke prototype Modelled with Cinema 4D 2018 Rendered with Corona Compositing with Nuke interiors Modelled with Cinema 4D | 3D Studio Max 2014-2018 Rendered with Corona | Vray | C4D Physical Renderer Compositing with Photoshop | Nuke exteriors Modelled with Cinema 4D | Maya | zbrush | ngplant 2011-2018 Rendered with Corona | Vray | C4D Physical Renderer Compositing with Photoshop | Nuke fantasy Modelled with Cinema 4D | zBrush | ngplant | makehuman 2011-2018 Rendered with Corona | C4D Physical Renderer Compositing with Photoshop | darktable | Nuke futuristic Modelled with Cinema 4D | zBrush 2012-2015 Rendered with C4D Physical Renderer Compositing with Photoshop For a more comprehensive portfolio feel free to visit: christianotten.daportfolio.com or ignisferroque.cgsociety.org A few animated experiments are available on: https://vimeo.com/christianotten All models, scenes and materials presented here where made by me, unless stated otherwise. Photo textures from cgtextures.com Thank you for watching! CHRISTIAN OTTEN Curriculum Vitae PERSONAL INFORMATION EDUCATION: Date of Birth: 09.09.1984 2016-2017 3D Animation and VFX course Place -

Poseray Handbuch 3.10.3
Das PoseRay Handbuch 3.10.3 Zusammengestellt von Steely. Angelehnt an die PoseRay Hilfedatei. PoseRay Handbuch V 3.10.3 Seite 1 Yo! Hör genau zu: Dies ist das deutsche Handbuch zu PoseRay, basierend auf dem Helpfile zum Programm. Es ist keine wörtliche Übersetzung, und FlyerX trifft keine Schuld an diesem Dokument (wenn man davon absieht, daß er PoseRay geschrieben hat). Dies ist ein Handbuch, kein Tutorial. Es erklärt nicht, wie man mit Poser tolle Frauen oder mit POV- Ray tolle Bilder macht. Es ist nur eine freie Übersetzung der poseray.html, die PoseRay beiliegt. Ich will mich bemühen, dieses Dokument aktuell zu halten, und es immer dann überarbeiten und erweitern, wenn FlyerX sichtbar etwas am Programm verändert. Das ist zumindest der Plan. Damit keine Verwirrung aufkommt, folgt das Handbuch in seinen Versionsnummern dem Programm. Die jeweils neueste Version findest Du auf meiner Homepage: www.blackdepth.de. Sei dankbar, daß Schwedenmann und Tom33 von www.POVray-forum.de meinen Prolltext auf Fehler gecheckt haben, sonst wäre das Handbuch noch grausiger. POV-Ray, Poser, DAZ, und viele andere Programm- und Firmennamen in diesem Handbuch sind geschützte Warenzeichen oder zumindest wie solche zu behandeln. Daß kein TM dahinter steht, bedeutet nicht, daß der Begriff frei ist. Unser Markenrecht ist krank, bevor Du also mit den Namen und Begriffen dieses Handbuchs rumalberst, mach dich schlau, ob da einer die Kralle drauf hat. Noch was: dieses Handbuch habe ich geschrieben, es ist mein Werk und ich kann damit machen, was ich will. Deshalb bestimme ich, daß es nicht geschützt ist. Es gibt schon genug Copyright- und IPR- Idioten; ich muß nicht jeden Blödsinn nachmachen. -

John Bachofer Graphic Designer
JOHN BACHOFER GRAPHIC DESIGNER Animation/Graphic Design/3D Modelling Marketing/Freelancer [email protected] | (760)-518-0145 http://johnkathrynjanewayba.wixsite.com/johnbachoferartist https://www.linkedin.com/in/johnny-bachofer-32888ab8/ Education Summary B.S. in Graphic Design with Meticulous and knowledgeable Graphic Design graduate known for skill in 3D modeling, rigging Emphasis on Animation and texturing. Deadline driven and results oriented artist who has exhibited exceptional talent in Grand Canyon University building highly detailed products yielding customer satisfaction. Graduated 2018 Key Skills include: graphic design, illustration, modeling/texturing, rigging and animation Software Work Experience Autodesk MAYA Source FilmMaker Real Art Daily Productions - Los Angeles, CA (Online) 11/2019 - Present Blender 3D Adobe Creative Lightwave 3D Suite: Character Animator DAZ Studio Photoshop • Mastered the use of Unreal Engine 4. Unreal Engine 4 Illustrator • Developed comprehensive 3D modelling and rigging skills. MakeHuman InDesign • Completed the company’s first animation of a quadruped character. Autodesk 3DS MAX After Effects • Met project milestones for writing, storyboard development and comencement of production. Unity Lightroom • Successful team member in a diverse and inclusive workplace. ZBrush Microsoft Office Sketchup Suite: Mogul Mommies Inc - New York, NY (Online) Feb 2017 - May 2018 AutoCAD Excel Game Development Artist Mixamo Fuse Word • Developed and released the “Toss That!” mobile app game. Poser Powerpoint -

A Procedural Interface Wrapper for Houdini Engine in Autodesk Maya
A PROCEDURAL INTERFACE WRAPPER FOR HOUDINI ENGINE IN AUTODESK MAYA A Thesis by BENJAMIN ROBERT HOUSE Submitted to the Office of Graduate and Professional Studies of Texas A&M University in partial fulfillment of the requirements for the degree of MASTER OF SCIENCE Chair of Committee, André Thomas Committee Members, John Keyser Ergun Akleman Head of Department, Tim McLaughlin May 2019 Major Subject: Visualization Copyright 2019 Benjamin Robert House ABSTRACT Game development studios are facing an ever-growing pressure to deliver quality content in greater quantities, making the automation of as many tasks as possible an important aspect of modern video game development. This has led to the growing popularity of integrating procedural workflows such as those offered by SideFX Software’s Houdini FX into the already established de- velopment pipelines. However, the current limitations of the Houdini Engine plugin for Autodesk Maya often require developers to take extra steps when creating tools to speed up development using Houdini. This hinders the workflow for developers, who have to design their Houdini Digi- tal Asset (HDA) tools around the limitations of the Houdini Engine plugin. Furthermore, because of the implementation of the HDA’s parameter display in Maya’s Attribute Editor when using the Houdini Engine Plugin, artists can easily be overloaded with too much information which can in turn hinder the workflow of any artists who are using the HDA. The limitations of an HDA used in the Houdini Engine Plugin in Maya as a tool that is intended to improve workflow can actually frustrate and confuse the user, ultimately causing more harm than good. -

Easy Facial Rigging and Animation Approaches
Pedro Tavares Barata Bastos EASY FACIAL RIGGING AND ANIMATION APPROACHES A dissertation in Computer Graphics and Human-Computer Interaction Presented to the Faculty of Engineering of the University of Porto in Partial Fulfillment of the Requirements for the Degree of Doctor of Philosophy in Digital Media Supervisor: Prof. Verónica Costa Orvalho April 2015 ii This work is financially supported by Fundação para a Ciência e a Tecnologia (FCT) via grant SFRH/BD/69878/2010, by Fundo Social Europeu (FSE), by Ministério da Educação e Ciência (MEC), by Programa Operacional Potencial Humano (POPH), by the European Union (EU) and partially by the UT Austin | Portugal program. Abstract Digital artists working in character production pipelines need optimized facial animation solutions to more easily create appealing character facial expressions for off-line and real- time applications (e.g. films and videogames). But the complexity of facial animation has grown exponentially since it first emerged during the production of Toy Story (Pixar, 1995), due to the increasing demand of audiences for better quality character facial animation. Over the last 15 to 20 years, companies and artists developed various character facial animation techniques in terms of deformation and control, which represent a fragmented state of the art in character facial rigging. Facial rigging is the act of planning and building the mechanical and control structures to animate a character's face. These structures are the articulations built by riggers and used by animators to bring life to a character. Due to the increasing demand of audiences for better quality facial animation in films and videogames, rigging faces became a complex field of expertise within character production pipelines. -

Mi Army Maya Download Crack
Mi Army Maya Download Crack Mi Army Maya Download Crack 1 / 2 Copy video URL Copy embed code Report issue · Powered by Streamable. Mi Army For Maya Download Crack ->>> http://urllie.com/wn9ff 42 views.. Miarmy 6.2 for Autodesk Maya | crowd-simulation plugin for Maya https://goo.gl/uWs11s More plugin .... Miarmy for maya. Bored of creating each separate models for warfield or fight. Now it's easy to create army. This plug-in is useful for creating armies reducing the .... 11.6MB Miarmy (named My Army) is a Maya plugin for crowd simulation AI behavioral animation creature physical .. KickassTorrents - Download torrent from .... free software downloadfree software download sitespc software free download full ... Miarmy (named “My Army”) is a Maya plugin for crowd simulation, AI, .... It's fast, fluid, intuitive, and designed to let you do what you want, the way you want. What you will get: Miarmy Express; Installation Guide; Free License .... Used to kill for MOD, MI ARMY, FBM, PB ADDICTS, ALL STAR KIDZ. Godonthefield is offline Miarmy pro maya 2011 torrent download, miarmy for maya .... Plugins Reviews and Download free for CG Softwares ... Basefount released Miarmy 7 with Maya 2019 Support. CGRecord ... Basefount released the new update of its crowd simulation tool for Autodesk Maya - Miarmy 7.. Plugins Reviews and Download free for CG Softwares ... [ #Autodesk #Maya #Basefount #Miarmy #Crowd #Simulation ]. Basefount has released Miarmy 6.5, the latest update to its crowd-simulation system for Maya with .... ... and Software Crack Full Version Title Download Android Games / PC Games and Software Crack Full Version: Miarmy 3.0 for Autodesk Maya Link Download. -

Jack's Poser Pro Manual Last Update: 2021 09 17
Jack's Poser Pro Manual Last Update: 2021 09 17 Note 1: This Manual has been prepared for my own use. If you find it useful, great. However, don't be surprised (or angry with me) if I have failed to update something that has changed from one version of Poser to the next and which I haven't discovered yet. Or if I have failed to understand and so incorrectly describe something. If I discover (or have pointed out to me) that something in this Manual doesn't work as I described, I'll see about updating my text. Note 2: I installed Poser 12 on 30 November 2020. I have no idea if anything in this Manual has changed in Poser 12. I will make necessary changes as I find them. I began using Poser Pro 2012 on about 2013 01 07. This file was started soon after doing a bit of experimenting and finding that I had no tutorial. So here are the results from experimenting, reading Poser Pro 2012 Reference Manual, Poser Pro 2014 Reference Manual, Poser Pro 11 Reference Manual, Smith Micro Tech Support, and internet research. I also have Practical Poser 8. The Official Guide, by Richard Schrand, even though Poser 8 would seem to be several iterations behind Poser Pro 2014, and even farther behind Poser Pro 11 which I started using in December 2015, or Poser 12 as noted above. Most of the information in this Manual is based on my experiences with Poser Pro 2012 and 2014, and probably still holds true for Poser Pro 11 or Poser 12 versions.