Representation Learning for Control
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Disentangled Variational Auto-Encoder for Semi-Supervised Learning
Information Sciences 482 (2019) 73–85 Contents lists available at ScienceDirect Information Sciences journal homepage: www.elsevier.com/locate/ins Disentangled Variational Auto-Encoder for semi-supervised learning ∗ Yang Li a, Quan Pan a, Suhang Wang c, Haiyun Peng b, Tao Yang a, Erik Cambria b, a School of Automation, Northwestern Polytechnical University, China b School of Computer Science and Engineering, Nanyang Technological University, Singapore c College of Information Sciences and Technology, Pennsylvania State University, USA a r t i c l e i n f o a b s t r a c t Article history: Semi-supervised learning is attracting increasing attention due to the fact that datasets Received 5 February 2018 of many domains lack enough labeled data. Variational Auto-Encoder (VAE), in particu- Revised 23 December 2018 lar, has demonstrated the benefits of semi-supervised learning. The majority of existing Accepted 24 December 2018 semi-supervised VAEs utilize a classifier to exploit label information, where the param- Available online 3 January 2019 eters of the classifier are introduced to the VAE. Given the limited labeled data, learn- Keywords: ing the parameters for the classifiers may not be an optimal solution for exploiting label Semi-supervised learning information. Therefore, in this paper, we develop a novel approach for semi-supervised Variational Auto-encoder VAE without classifier. Specifically, we propose a new model called Semi-supervised Dis- Disentangled representation entangled VAE (SDVAE), which encodes the input data into disentangled representation Neural networks and non-interpretable representation, then the category information is directly utilized to regularize the disentangled representation via the equality constraint. -

Training Autoencoders by Alternating Minimization
Under review as a conference paper at ICLR 2018 TRAINING AUTOENCODERS BY ALTERNATING MINI- MIZATION Anonymous authors Paper under double-blind review ABSTRACT We present DANTE, a novel method for training neural networks, in particular autoencoders, using the alternating minimization principle. DANTE provides a distinct perspective in lieu of traditional gradient-based backpropagation techniques commonly used to train deep networks. It utilizes an adaptation of quasi-convex optimization techniques to cast autoencoder training as a bi-quasi-convex optimiza- tion problem. We show that for autoencoder configurations with both differentiable (e.g. sigmoid) and non-differentiable (e.g. ReLU) activation functions, we can perform the alternations very effectively. DANTE effortlessly extends to networks with multiple hidden layers and varying network configurations. In experiments on standard datasets, autoencoders trained using the proposed method were found to be very promising and competitive to traditional backpropagation techniques, both in terms of quality of solution, as well as training speed. 1 INTRODUCTION For much of the recent march of deep learning, gradient-based backpropagation methods, e.g. Stochastic Gradient Descent (SGD) and its variants, have been the mainstay of practitioners. The use of these methods, especially on vast amounts of data, has led to unprecedented progress in several areas of artificial intelligence. On one hand, the intense focus on these techniques has led to an intimate understanding of hardware requirements and code optimizations needed to execute these routines on large datasets in a scalable manner. Today, myriad off-the-shelf and highly optimized packages exist that can churn reasonably large datasets on GPU architectures with relatively mild human involvement and little bootstrap effort. -
A Deep Hierarchical Variational Autoencoder
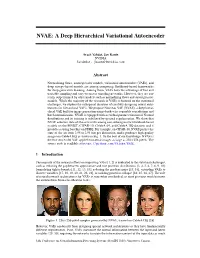
NVAE: A Deep Hierarchical Variational Autoencoder Arash Vahdat, Jan Kautz NVIDIA {avahdat, jkautz}@nvidia.com Abstract Normalizing flows, autoregressive models, variational autoencoders (VAEs), and deep energy-based models are among competing likelihood-based frameworks for deep generative learning. Among them, VAEs have the advantage of fast and tractable sampling and easy-to-access encoding networks. However, they are cur- rently outperformed by other models such as normalizing flows and autoregressive models. While the majority of the research in VAEs is focused on the statistical challenges, we explore the orthogonal direction of carefully designing neural archi- tectures for hierarchical VAEs. We propose Nouveau VAE (NVAE), a deep hierar- chical VAE built for image generation using depth-wise separable convolutions and batch normalization. NVAE is equipped with a residual parameterization of Normal distributions and its training is stabilized by spectral regularization. We show that NVAE achieves state-of-the-art results among non-autoregressive likelihood-based models on the MNIST, CIFAR-10, CelebA 64, and CelebA HQ datasets and it provides a strong baseline on FFHQ. For example, on CIFAR-10, NVAE pushes the state-of-the-art from 2.98 to 2.91 bits per dimension, and it produces high-quality images on CelebA HQ as shown in Fig. 1. To the best of our knowledge, NVAE is the first successful VAE applied to natural images as large as 256×256 pixels. The source code is available at https://github.com/NVlabs/NVAE. 1 Introduction The majority of the research efforts on improving VAEs [1, 2] is dedicated to the statistical challenges, such as reducing the gap between approximate and true posterior distributions [3, 4, 5, 6, 7, 8, 9, 10], formulating tighter bounds [11, 12, 13, 14], reducing the gradient noise [15, 16], extending VAEs to discrete variables [17, 18, 19, 20, 21, 22, 23], or tackling posterior collapse [24, 25, 26, 27]. -

Explainable Deep Learning Models in Medical Image Analysis
Journal of Imaging Review Explainable Deep Learning Models in Medical Image Analysis Amitojdeep Singh 1,2,* , Sourya Sengupta 1,2 and Vasudevan Lakshminarayanan 1,2 1 Theoretical and Experimental Epistemology Laboratory, School of Optometry and Vision Science, University of Waterloo, Waterloo, ON N2L 3G1, Canada; [email protected] (S.S.); [email protected] (V.L.) 2 Department of Systems Design Engineering, University of Waterloo, Waterloo, ON N2L 3G1, Canada * Correspondence: [email protected] Received: 28 May 2020; Accepted: 17 June 2020; Published: 20 June 2020 Abstract: Deep learning methods have been very effective for a variety of medical diagnostic tasks and have even outperformed human experts on some of those. However, the black-box nature of the algorithms has restricted their clinical use. Recent explainability studies aim to show the features that influence the decision of a model the most. The majority of literature reviews of this area have focused on taxonomy, ethics, and the need for explanations. A review of the current applications of explainable deep learning for different medical imaging tasks is presented here. The various approaches, challenges for clinical deployment, and the areas requiring further research are discussed here from a practical standpoint of a deep learning researcher designing a system for the clinical end-users. Keywords: explainability; explainable AI; XAI; deep learning; medical imaging; diagnosis 1. Introduction Computer-aided diagnostics (CAD) using artificial intelligence (AI) provides a promising way to make the diagnosis process more efficient and available to the masses. Deep learning is the leading artificial intelligence (AI) method for a wide range of tasks including medical imaging problems. -

Turbo Autoencoder: Deep Learning Based Channel Codes for Point-To-Point Communication Channels
Turbo Autoencoder: Deep learning based channel codes for point-to-point communication channels Hyeji Kim Himanshu Asnani Yihan Jiang Samsung AI Center School of Technology ECE Department Cambridge and Computer Science University of Washington Cambridge, United Tata Institute of Seattle, United States Kingdom Fundamental Research [email protected] [email protected] Mumbai, India [email protected] Sewoong Oh Pramod Viswanath Sreeram Kannan Allen School of ECE Department ECE Department Computer Science & University of Illinois at University of Washington Engineering Urbana Champaign Seattle, United States University of Washington Illinois, United States [email protected] Seattle, United States [email protected] [email protected] Abstract Designing codes that combat the noise in a communication medium has remained a significant area of research in information theory as well as wireless communica- tions. Asymptotically optimal channel codes have been developed by mathemati- cians for communicating under canonical models after over 60 years of research. On the other hand, in many non-canonical channel settings, optimal codes do not exist and the codes designed for canonical models are adapted via heuristics to these channels and are thus not guaranteed to be optimal. In this work, we make significant progress on this problem by designing a fully end-to-end jointly trained neural encoder and decoder, namely, Turbo Autoencoder (TurboAE), with the following contributions: (a) under moderate block lengths, TurboAE approaches state-of-the-art performance under canonical channels; (b) moreover, TurboAE outperforms the state-of-the-art codes under non-canonical settings in terms of reliability. TurboAE shows that the development of channel coding design can be automated via deep learning, with near-optimal performance. -

Double Backpropagation for Training Autoencoders Against Adversarial Attack
1 Double Backpropagation for Training Autoencoders against Adversarial Attack Chengjin Sun, Sizhe Chen, and Xiaolin Huang, Senior Member, IEEE Abstract—Deep learning, as widely known, is vulnerable to adversarial samples. This paper focuses on the adversarial attack on autoencoders. Safety of the autoencoders (AEs) is important because they are widely used as a compression scheme for data storage and transmission, however, the current autoencoders are easily attacked, i.e., one can slightly modify an input but has totally different codes. The vulnerability is rooted the sensitivity of the autoencoders and to enhance the robustness, we propose to adopt double backpropagation (DBP) to secure autoencoder such as VAE and DRAW. We restrict the gradient from the reconstruction image to the original one so that the autoencoder is not sensitive to trivial perturbation produced by the adversarial attack. After smoothing the gradient by DBP, we further smooth the label by Gaussian Mixture Model (GMM), aiming for accurate and robust classification. We demonstrate in MNIST, CelebA, SVHN that our method leads to a robust autoencoder resistant to attack and a robust classifier able for image transition and immune to adversarial attack if combined with GMM. Index Terms—double backpropagation, autoencoder, network robustness, GMM. F 1 INTRODUCTION N the past few years, deep neural networks have been feature [9], [10], [11], [12], [13], or network structure [3], [14], I greatly developed and successfully used in a vast of fields, [15]. such as pattern recognition, intelligent robots, automatic Adversarial attack and its defense are revolving around a control, medicine [1]. Despite the great success, researchers small ∆x and a big resulting difference between f(x + ∆x) have found the vulnerability of deep neural networks to and f(x). -
Generative Models
Lecture 11: Generative Models Fei-Fei Li & Justin Johnson & Serena Yeung Lecture 11 - 1 May 9, 2019 Administrative ● A3 is out. Due May 22. ● Milestone is due next Wednesday. ○ Read Piazza post for milestone requirements. ○ Need to Finish data preprocessing and initial results by then. ● Don't discuss exam yet since people are still taking it. Fei-Fei Li & Justin Johnson & Serena Yeung Lecture 11 -2 May 9, 2019 Overview ● Unsupervised Learning ● Generative Models ○ PixelRNN and PixelCNN ○ Variational Autoencoders (VAE) ○ Generative Adversarial Networks (GAN) Fei-Fei Li & Justin Johnson & Serena Yeung Lecture 11 - 3 May 9, 2019 Supervised vs Unsupervised Learning Supervised Learning Data: (x, y) x is data, y is label Goal: Learn a function to map x -> y Examples: Classification, regression, object detection, semantic segmentation, image captioning, etc. Fei-Fei Li & Justin Johnson & Serena Yeung Lecture 11 - 4 May 9, 2019 Supervised vs Unsupervised Learning Supervised Learning Data: (x, y) x is data, y is label Cat Goal: Learn a function to map x -> y Examples: Classification, regression, object detection, Classification semantic segmentation, image captioning, etc. This image is CC0 public domain Fei-Fei Li & Justin Johnson & Serena Yeung Lecture 11 - 5 May 9, 2019 Supervised vs Unsupervised Learning Supervised Learning Data: (x, y) x is data, y is label Goal: Learn a function to map x -> y Examples: Classification, DOG, DOG, CAT regression, object detection, semantic segmentation, image Object Detection captioning, etc. This image is CC0 public domain Fei-Fei Li & Justin Johnson & Serena Yeung Lecture 11 - 6 May 9, 2019 Supervised vs Unsupervised Learning Supervised Learning Data: (x, y) x is data, y is label Goal: Learn a function to map x -> y Examples: Classification, GRASS, CAT, TREE, SKY regression, object detection, semantic segmentation, image Semantic Segmentation captioning, etc. -
Artificial Intelligence Applied to Electromechanical Monitoring, A
ARTIFICIAL INTELLIGENCE APPLIED TO ELECTROMECHANICAL MONITORING, A PERFORMANCE ANALYSIS Erasmus project Authors: Staš Osterc Mentor: Dr. Miguel Delgado Prieto, Dr. Francisco Arellano Espitia 1/5/2020 P a g e II ANNEX VI – DECLARACIÓ D’HONOR P a g e II I declare that, the work in this Master Thesis / Degree Thesis (choose one) is completely my own work, no part of this Master Thesis / Degree Thesis (choose one) is taken from other people’s work without giving them credit, all references have been clearly cited, I’m authorised to make use of the company’s / research group (choose one) related information I’m providing in this document (select when it applies). I understand that an infringement of this declaration leaves me subject to the foreseen disciplinary actions by The Universitat Politècnica de Catalunya - BarcelonaTECH. ___________________ __________________ ___________ Student Name Signature Date Title of the Thesis : _________________________________________________ ________________________________________________________________ ________________________________________________________________ ________________________________________________________________ P a g e II Contents Introduction........................................................................................................................................5 Abstract ..........................................................................................................................................5 Aim .................................................................................................................................................6 -

Infinite Variational Autoencoder for Semi-Supervised Learning
Infinite Variational Autoencoder for Semi-Supervised Learning M. Ehsan Abbasnejad Anthony Dick Anton van den Hengel The University of Adelaide {ehsan.abbasnejad, anthony.dick, anton.vandenhengel}@adelaide.edu.au Abstract with whatever labelled data is available to train a discrimi- native model for classification. This paper presents an infinite variational autoencoder We demonstrate that our infinite VAE outperforms both (VAE) whose capacity adapts to suit the input data. This the classical VAE and standard classification methods, par- is achieved using a mixture model where the mixing coef- ticularly when the number of available labelled samples is ficients are modeled by a Dirichlet process, allowing us to small. This is because the infinite VAE is able to more ac- integrate over the coefficients when performing inference. curately capture the distribution of the unlabelled data. It Critically, this then allows us to automatically vary the therefore provides a generative model that allows the dis- number of autoencoders in the mixture based on the data. criminative model, which is trained based on its output, to Experiments show the flexibility of our method, particularly be more effectively learnt using a small number of samples. for semi-supervised learning, where only a small number of The main contribution of this paper is twofold: (1) we training samples are available. provide a Bayesian non-parametric model for combining autoencoders, in particular variational autoencoders. This bridges the gap between non-parametric Bayesian meth- 1. Introduction ods and the deep neural networks; (2) we provide a semi- supervised learning approach that utilizes the infinite mix- The Variational Autoencoder (VAE) [18] is a newly in- ture of autoencoders learned by our model for prediction troduced tool for unsupervised learning of a distribution x x with from a small number of labeled examples. -

Unsupervised Speech Representation Learning Using Wavenet Autoencoders Jan Chorowski, Ron J
1 Unsupervised speech representation learning using WaveNet autoencoders Jan Chorowski, Ron J. Weiss, Samy Bengio, Aaron¨ van den Oord Abstract—We consider the task of unsupervised extraction speaker gender and identity, from phonetic content, properties of meaningful latent representations of speech by applying which are consistent with internal representations learned autoencoding neural networks to speech waveforms. The goal by speech recognizers [13], [14]. Such representations are is to learn a representation able to capture high level semantic content from the signal, e.g. phoneme identities, while being desired in several tasks, such as low resource automatic speech invariant to confounding low level details in the signal such as recognition (ASR), where only a small amount of labeled the underlying pitch contour or background noise. Since the training data is available. In such scenario, limited amounts learned representation is tuned to contain only phonetic content, of data may be sufficient to learn an acoustic model on the we resort to using a high capacity WaveNet decoder to infer representation discovered without supervision, but insufficient information discarded by the encoder from previous samples. Moreover, the behavior of autoencoder models depends on the to learn the acoustic model and a data representation in a fully kind of constraint that is applied to the latent representation. supervised manner [15], [16]. We compare three variants: a simple dimensionality reduction We focus on representations learned with autoencoders bottleneck, a Gaussian Variational Autoencoder (VAE), and a applied to raw waveforms and spectrogram features and discrete Vector Quantized VAE (VQ-VAE). We analyze the quality investigate the quality of learned representations on LibriSpeech of learned representations in terms of speaker independence, the ability to predict phonetic content, and the ability to accurately re- [17]. -

Variational Autoencoder for End-To-End Control of Autonomous Driving with Novelty Detection and Training De-Biasing
Variational Autoencoder for End-to-End Control of Autonomous Driving with Novelty Detection and Training De-biasing Alexander Amini1, Wilko Schwarting1, Guy Rosman2, Brandon Araki1, Sertac Karaman3, Daniela Rus1 Abstract— This paper introduces a new method for end-to- Uncertainty Estimation end training of deep neural networks (DNNs) and evaluates & Novelty Detection it in the context of autonomous driving. DNN training has Uncertainty been shown to result in high accuracy for perception to action Propagate learning given sufficient training data. However, the trained models may fail without warning in situations with insufficient or biased training data. In this paper, we propose and evaluate Encoder a novel architecture for self-supervised learning of latent variables to detect the insufficiently trained situations. Our method also addresses training data imbalance, by learning a set of underlying latent variables that characterize the training Dataset Debiasing data and evaluate potential biases. We show how these latent Weather Adjacent Road Steering distributions can be leveraged to adapt and accelerate the (Snow) Vehicles Surface Control training pipeline by training on only a fraction of the total Command Resampled data dataset. We evaluate our approach on a challenging dataset distribution for driving. The data is collected from a full-scale autonomous Unsupervised Latent vehicle. Our method provides qualitative explanation for the Variables Sample Efficient latent variables learned in the model. Finally, we show how Accelerated Training our model can be additionally trained as an end-to-end con- troller, directly outputting a steering control command for an Fig. 1: Semi-supervised end-to-end control. An encoder autonomous vehicle. -
An Introduction to Variational Autoencoders Full Text Available At
Full text available at: http://dx.doi.org/10.1561/2200000056 An Introduction to Variational Autoencoders Full text available at: http://dx.doi.org/10.1561/2200000056 Other titles in Foundations and Trends R in Machine Learning Computational Optimal Transport Gabriel Peyre and Marco Cuturi ISBN: 978-1-68083-550-2 An Introduction to Deep Reinforcement Learning Vincent Francois-Lavet, Peter Henderson, Riashat Islam, Marc G. Bellemare and Joelle Pineau ISBN: 978-1-68083-538-0 An Introduction to Wishart Matrix Moments Adrian N. Bishop, Pierre Del Moral and Angele Niclas ISBN: 978-1-68083-506-9 A Tutorial on Thompson Sampling Daniel J. Russo, Benjamin Van Roy, Abbas Kazerouni, Ian Osband and Zheng Wen ISBN: 978-1-68083-470-3 Full text available at: http://dx.doi.org/10.1561/2200000056 An Introduction to Variational Autoencoders Diederik P. Kingma Google [email protected] Max Welling University of Amsterdam Qualcomm [email protected] Boston — Delft Full text available at: http://dx.doi.org/10.1561/2200000056 Foundations and Trends R in Machine Learning Published, sold and distributed by: now Publishers Inc. PO Box 1024 Hanover, MA 02339 United States Tel. +1-781-985-4510 www.nowpublishers.com [email protected] Outside North America: now Publishers Inc. PO Box 179 2600 AD Delft The Netherlands Tel. +31-6-51115274 The preferred citation for this publication is D. P. Kingma and M. Welling. An Introduction to Variational Autoencoders. Foundations and Trends R in Machine Learning, vol. 12, no. 4, pp. 307–392, 2019. ISBN: 978-1-68083-623-3 c 2019 D.