Introduction to Powerpc System Software 1
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Chapter 8 Instruction Set
Chapter 8 Instruction Set 80 80 This chapter lists the PowerPC instruction set in alphabetical order by mnemonic. Note that each entry includes the instruction formats and a quick reference ‘legend’ that provides such information as the level(s) of the PowerPC architecture in which the instruction may be found—user instruction set architecture (UISA), virtual environment architecture U (VEA), and operating environment architecture (OEA); and the privilege level of the V instruction—user- or supervisor-level (an instruction is assumed to be user-level unless the O legend specifies that it is supervisor-level); and the instruction formats. The format diagrams show, horizontally, all valid combinations of instruction fields; for a graphical representation of these instruction formats, see Appendix A, “PowerPC Instruction Set Listings.” The legend also indicates if the instruction is 64-bit, , 64-bit bridge, and/or optional. A description of the instruction fields and pseudocode conventions are also provided. For more information on the PowerPC instruction set, refer to Chapter 4, “Addressing Modes and Instruction Set Summary.” Note that the architecture specification refers to user-level and supervisor-level as problem state and privileged state, respectively. 8.1 Instruction Formats Instructions are four bytes long and word-aligned, so when instruction addresses are U presented to the processor (as in branch instructions) the two low-order bits are ignored. Similarly, whenever the processor develops an instruction address, its two low-order bits are zero. Bits 0–5 always specify the primary opcode. Many instructions also have an extended opcode. The remaining bits of the instruction contain one or more fields for the different instruction formats. -

Book E: Enhanced Powerpc™ Architecture
Book E: Enhanced PowerPC Architecture Version 1.0 May 7, 2002 Third Edition (Dec 2001) The following paragraph does not apply to the United Kingdom or any country where such provisions are inconsistent with local law: INTERNATIONAL BUSINESS MACHINES CORPORATION PROVIDES THIS DOCUMENT “AS IS” WITHOUT WARRANTY OF ANY KIND, EITHER EXPRESSED OR IMPLIED, INCLUDING, BUT NOT LIMITED TO, THE IMPLIED WARRANTIES OF MERCHANTABILITY AND FITNESS FOR A PARTICULAR PURPOSE. Some states do not allow disclaimer of express or implied warranties in certain transactions; therefore, this statement may not apply to you. IBM does not warrant that the use of the information herein shall be free from third party intellectual property claims. IBM does not warrant that the contents of this document will meet your requirements or that the document is error-free. Changes are periodically made to the information herein; these changes will be incorporated in new editions of the document. IBM may make improvements and or changes in the product(s) and/or program(s) described in this document at any time. This document does not imply a commitment by IBM to supply or make generally available the product(s) described herein. No part of this document may be reproduced or distributed in any form or by any means, or stored in a data base or retrieval system, without the written permission of IBM. Address comments about this document to: IBM Corporation Department B5H / Building 667 3039 Cornwallis Road P.O. Box 12195 Research Triangle Park, NC 27709 Portions of the information in this document may have been published previously in the following related documents: The PowerPC Architecture: A Specification for a New Family of RISC Processors, Second Edition (1994) The IBM PowerPC Embedded Environment: Architectural Specifications for IBM PowerPC Embedded Controllers, Second Edition (1998) IBM may have patents or pending patent applications covering the subject matter in this document. -

Ebook - Informations About Operating Systems Version: August 15, 2006 | Download
eBook - Informations about Operating Systems Version: August 15, 2006 | Download: www.operating-system.org AIX Internet: AIX AmigaOS Internet: AmigaOS AtheOS Internet: AtheOS BeIA Internet: BeIA BeOS Internet: BeOS BSDi Internet: BSDi CP/M Internet: CP/M Darwin Internet: Darwin EPOC Internet: EPOC FreeBSD Internet: FreeBSD HP-UX Internet: HP-UX Hurd Internet: Hurd Inferno Internet: Inferno IRIX Internet: IRIX JavaOS Internet: JavaOS LFS Internet: LFS Linspire Internet: Linspire Linux Internet: Linux MacOS Internet: MacOS Minix Internet: Minix MorphOS Internet: MorphOS MS-DOS Internet: MS-DOS MVS Internet: MVS NetBSD Internet: NetBSD NetWare Internet: NetWare Newdeal Internet: Newdeal NEXTSTEP Internet: NEXTSTEP OpenBSD Internet: OpenBSD OS/2 Internet: OS/2 Further operating systems Internet: Further operating systems PalmOS Internet: PalmOS Plan9 Internet: Plan9 QNX Internet: QNX RiscOS Internet: RiscOS Solaris Internet: Solaris SuSE Linux Internet: SuSE Linux Unicos Internet: Unicos Unix Internet: Unix Unixware Internet: Unixware Windows 2000 Internet: Windows 2000 Windows 3.11 Internet: Windows 3.11 Windows 95 Internet: Windows 95 Windows 98 Internet: Windows 98 Windows CE Internet: Windows CE Windows Family Internet: Windows Family Windows ME Internet: Windows ME Seite 1 von 138 eBook - Informations about Operating Systems Version: August 15, 2006 | Download: www.operating-system.org Windows NT 3.1 Internet: Windows NT 3.1 Windows NT 4.0 Internet: Windows NT 4.0 Windows Server 2003 Internet: Windows Server 2003 Windows Vista Internet: Windows Vista Windows XP Internet: Windows XP Apple - Company Internet: Apple - Company AT&T - Company Internet: AT&T - Company Be Inc. - Company Internet: Be Inc. - Company BSD Family Internet: BSD Family Cray Inc. -

Lecture 1: Course Introduction G Course Organization G Historical Overview G Computer Organization G Why the MC68000? G Why Assembly Language?
Lecture 1: Course introduction g Course organization g Historical overview g Computer organization g Why the MC68000? g Why assembly language? Microprocessor-based System Design 1 Ricardo Gutierrez-Osuna Wright State University Course organization g Grading Instructor n Exams Ricardo Gutierrez-Osuna g 1 midterm and 1 final Office: 401 Russ n Homework Tel:775-5120 g 4 problem sets (not graded) [email protected] n Quizzes http://www.cs.wright.edu/~rgutier g Biweekly Office hours: TBA n Laboratories g 5 Labs Teaching Assistant g Grading scheme Mohammed Tabrez Office: 339 Russ [email protected] Weight (%) Office hours: TBA Quizes 20 Laboratory 40 Midterm 20 Final Exam 20 Microprocessor-based System Design 2 Ricardo Gutierrez-Osuna Wright State University Course outline g Module I: Programming (8 lectures) g MC68000 architecture (2) g Assembly language (5) n Instruction and addressing modes (2) n Program control (1) n Subroutines (2) g C language (1) g Module II: Peripherals (9) g Exception processing (1) g Devices (6) n PI/T timer (2) n PI/T parallel port (2) n DUART serial port (1) g Memory and I/O interface (1) g Address decoding (2) Microprocessor-based System Design 3 Ricardo Gutierrez-Osuna Wright State University Brief history of computers GENERATION FEATURES MILESTONES YEAR NOTES Asia Minor, Abacus 3000BC Only replaced by paper and pencil Mech., Blaise Pascal, Pascaline 1642 Decimal addition (8 decimal figs) Early machines Electro- Charles Babbage Differential Engine 1823 Steam powered (3000BC-1945) mech. Herman Hollerith, -
Implementing Powerpc Linux on System I Platform
Front cover Implementing POWER Linux on IBM System i Platform Planning and configuring Linux servers on IBM System i platform Linux distribution on IBM System i Platform installation guide Tips to run Linux servers on IBM System i platform Yessong Johng Erwin Earley Rico Franke Vlatko Kosturjak ibm.com/redbooks International Technical Support Organization Implementing POWER Linux on IBM System i Platform February 2007 SG24-6388-01 Note: Before using this information and the product it supports, read the information in “Notices” on page vii. Second Edition (February 2007) This edition applies to i5/OS V5R4, SLES10 and RHEL4. © Copyright International Business Machines Corporation 2005, 2007. All rights reserved. Note to U.S. Government Users Restricted Rights -- Use, duplication or disclosure restricted by GSA ADP Schedule Contract with IBM Corp. Contents Notices . vii Trademarks . viii Preface . ix The team that wrote this redbook. ix Become a published author . xi Comments welcome. xi Chapter 1. Introduction to Linux on System i platform . 1 1.1 Concepts and terminology . 2 1.1.1 System i platform . 2 1.1.2 Hardware management console . 4 1.1.3 Virtual Partition Manager (VPM) . 10 1.2 Brief introduction to Linux and Linux on System i platform . 12 1.2.1 Linux on System i platform . 12 1.3 Differences between existing Power5-based System i and previous System i models 13 1.3.1 Linux enhancements on Power5 / Power5+ . 14 1.4 Where to go for more information . 15 Chapter 2. Configuration planning . 17 2.1 Concepts and terminology . 18 2.1.1 Processor concepts . -
A Developer's Guide to the POWER Architecture
http://www.ibm.com/developerworks/linux/library/l-powarch/ 7/26/2011 10:53 AM English Sign in (or register) Technical topics Evaluation software Community Events A developer's guide to the POWER architecture POWER programming by the book Brett Olsson , Processor architect, IBM Anthony Marsala , Software engineer, IBM Summary: POWER® processors are found in everything from supercomputers to game consoles and from servers to cell phones -- and they all share a common architecture. This introduction to the PowerPC application-level programming model will give you an overview of the instruction set, important registers, and other details necessary for developing reliable, high performing POWER applications and maintaining code compatibility among processors. Date: 30 Mar 2004 Level: Intermediate Also available in: Japanese Activity: 22383 views Comments: The POWER architecture and the application-level programming model are common across all branches of the POWER architecture family tree. For detailed information, see the product user's manuals available in the IBM® POWER Web site technical library (see Resources for a link). The POWER architecture is a Reduced Instruction Set Computer (RISC) architecture, with over two hundred defined instructions. POWER is RISC in that most instructions execute in a single cycle and typically perform a single operation (such as loading storage to a register, or storing a register to memory). The POWER architecture is broken up into three levels, or "books." By segmenting the architecture in this way, code compatibility can be maintained across implementations while leaving room for implementations to choose levels of complexity for price/performances trade-offs. The levels are: Book I. -

A Modular Soft Processor Core in VHDL
A Modular Soft Processor Core in VHDL Jack Whitham 2002-2003 This is a Third Year project submitted for the degree of MEng in the Department of Computer Science at the University of York. The project will attempt to demonstrate that a modular soft processor core can be designed and implemented on an FPGA, and that the core can be optimised to run a particular embedded application using a minimal amount of FPGA space. The word count of this project (as counted by the Unix wc command after detex was run on the LaTeX source) is 33647 words. This includes all text in the main report and Appendices A, B and C. Excluding source code, the project is 70 pages in length. i Contents I. Introduction 1 1. Background and Literature 1 1.1. Soft Processor Cores . 1 1.2. A Field Programmable Gate Array . 1 1.3. VHSIC Hardware Definition Language (VHDL) . 2 1.4. The Motorola 68020 . 2 II. High-level Project Decisions 3 2. Should the design be based on an existing one? 3 3. Which processor should the soft core be based upon? 3 4. Which processor should be chosen? 3 5. Restating the aims of the project in terms of the chosen processor 4 III. Modular Processor Design Decisions 4 6. Processor Design 4 6.1. Alternatives to a complete processor implementation . 4 6.2. A real processor . 5 6.3. Instruction Decoder and Control Logic . 5 6.4. Arithmetic and Logic Unit (ALU) . 7 6.5. Register File . 7 6.6. Links between Components . -

Superh RISC Engine SH-1/SH-2
SuperH RISC Engine SH-1/SH-2 Programming Manual September 3, 1996 Hitachi America Ltd. Notice When using this document, keep the following in mind: 1. This document may, wholly or partially, be subject to change without notice. 2. All rights are reserved: No one is permitted to reproduce or duplicate, in any form, the whole or part of this document without Hitachi’s permission. 3. Hitachi will not be held responsible for any damage to the user that may result from accidents or any other reasons during operation of the user’s unit according to this document. 4. Circuitry and other examples described herein are meant merely to indicate the characteristics and performance of Hitachi’s semiconductor products. Hitachi assumes no responsibility for any intellectual property claims or other problems that may result from applications based on the examples described herein. 5. No license is granted by implication or otherwise under any patents or other rights of any third party or Hitachi, Ltd. 6. MEDICAL APPLICATIONS: Hitachi’s products are not authorized for use in MEDICAL APPLICATIONS without the written consent of the appropriate officer of Hitachi’s sales company. Such use includes, but is not limited to, use in life support systems. Buyers of Hitachi’s products are requested to notify the relevant Hitachi sales offices when planning to use the products in MEDICAL APPLICATIONS. Introduction The SuperH RISC engine family incorporates a RISC (Reduced Instruction Set Computer) type CPU. A basic instruction can be executed in one clock cycle, realizing high performance operation. A built-in multiplier can execute multiplication and addition as quickly as DSP. -

Introduction of Microprocessor
Introduction of Microprocessor A Microprocessor is an important part of a computer architecture without which you will not be able to perform anything on your computer. It is a programmable device that takes in input, performs some arithmetic and logical operations over it and produces desired output. In simple words, a Microprocessor is a digital device on a chip which can fetch instruction from memory, decode and execute them and give results. Basics of Microprocessor – A Microprocessor takes a bunch of instructions in machine language and executes them, telling the processor what it has to do. Microprocessor performs three basic things while executing the instruction: 1. It performs some basic operations like addition, subtraction, multiplication, division and some logical operations using its Arithmetic and Logical Unit (ALU). New Microprocessors also perform operations on floating point numbers also. 2. Data in a Microprocessor can move from one location to another. 3. It has a Program Counter (PC) register that stores the address of the next instruction based on the value of PC, Microprocessor jumps from one location to another and takes decision. A typical Microprocessor structure looks like this. Clock Speed of different Microprocessor: 16-bit Microprocessor – 8086: 4.7MHz, 8MHz, 10MHz 8088: more than 5MHz 80186/80188: 6MHz 80286: 8MHz 32-bit Microprocessor – INTEL 80386: 16MHz to 33MHz INTEL 80486: 16MHz to 100MHz PENTIUM: 66MHz 64-bit Microprocessor – INTEL CORE-2: 1.2GHz to 3GHz INTEL i7: 66GHz to 3.33GHz INTEL i5: 2.4GHz to 3.6GHz INTEL i3: 2.93GHz to 3.33GHz We do not have any 128-bit Microprocessor in work at present one among the reasons for this is that we are a long way from exhausting the 64 bit address space itself, we use it a constant rate of roughly 2 bits every 3 years. -

Develop-16 9312 December 1993.Pdf
E D I T O R I A L S T A F F Editor-in-Cheek Caroline Rose Technical Buckstopper Dave Johnson Our Boss Greg Joswiak His Boss Dennis Matthews Review Board Pete (“Luke”) Alexander, C. K. Haun, Jim Reekes, Bryan K. (“Beaker”) Ressler, Larry Rosenstein, Andy Shebanow, Gregg Williams Managing Editor Cynthia Jasper Contributing Editors Lorraine Anderson, Philip Borenstein, Robin Cowan, Matt Deatherage, The cover. Mark Jenkins of Rucker Toni Haskell, Judy Helfand, Rebecca Pepper Huggins Design created this cover using Indexer Marc Savage Adobe Photoshop, Adobe Illustrator, Special thanks to Smart Friend Dean Yu for Fractal Design Painter, and a Macintosh his help during Dave Johnson’s sabbatical. Quadra 950. He looks forward to making the leap himself to Macintosh on PowerPC. A R T & P R O D U C T I O N This issue’s CD. The develop Bookmark Production/Art Director Diane Wilcox CD (or the Developer CD Series disc, Technical Illustration Dave Olmos, John Ryan Reference Library edition) for December Formatting Forbes Mill Press 1993 or later contains this issue and all Printing Wolfer Printing Company, Inc. back issues of develop along with the code Film Preparation Aptos Post, Inc. that the articles describe. The develop Production PrePress Assembly issues and code are also available on AppleLink and via anonymous ftp on Photography Sharon Beals ftp.apple.com. Note that some software Online Production Cassi Carpenter and documentation referred to as being on develop, The Apple Technical Journal, a this issue’s CD may be located on the Tool quarterly publication of Apple Computer’s Chest edition rather than the Reference Developer Press group, is published in Library edition of the Developer CD Series March, June, September, and December. -
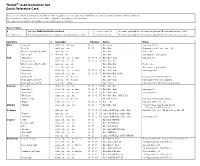
Thumb® 16-Bit Instruction Set Quick Reference Card
Thumb® 16-bit Instruction Set Quick Reference Card This card lists all Thumb instructions available on Thumb-capable processors earlier than ARM®v6T2. In addition, it lists all Thumb-2 16-bit instructions. The instructions shown on this card are all 16-bit in Thumb-2, except where noted otherwise. All registers are Lo (R0-R7) except where specified. Hi registers are R8-R15. Key to Tables § See Table ARM architecture versions. <loreglist+LR> A comma-separated list of Lo registers. plus the LR, enclosed in braces, { and }. <loreglist> A comma-separated list of Lo registers, enclosed in braces, { and }. <loreglist+PC> A comma-separated list of Lo registers. plus the PC, enclosed in braces, { and }. Operation § Assembler Updates Action Notes Move Immediate MOVS Rd, #<imm> N Z Rd := imm imm range 0-255. Lo to Lo MOVS Rd, Rm N Z Rd := Rm Synonym of LSLS Rd, Rm, #0 Hi to Lo, Lo to Hi, Hi to Hi MOV Rd, Rm Rd := Rm Not Lo to Lo. Any to Any 6 MOV Rd, Rm Rd := Rm Any register to any register. Add Immediate 3 ADDS Rd, Rn, #<imm> N Z C V Rd := Rn + imm imm range 0-7. All registers Lo ADDS Rd, Rn, Rm N Z C V Rd := Rn + Rm Hi to Lo, Lo to Hi, Hi to Hi ADD Rd, Rd, Rm Rd := Rd + Rm Not Lo to Lo. Any to Any T2 ADD Rd, Rd, Rm Rd := Rd + Rm Any register to any register. Immediate 8 ADDS Rd, Rd, #<imm> N Z C V Rd := Rd + imm imm range 0-255. -

A Manual for the Assemblerߤ Rob Pike Lucent Technologies, Bell Labs
A Manual for the Assembler Rob Pike Lucent Technologies, Bell Labs Machines There is an assembler for each of the MIPS, SPARC, Intel 386, ARM, PowerPC, Motorola 68010, and Motorola 68020. The 68020 assembler, 2a, is the oldest and in many ways the prototype. The assemblers are really just variations of a single program: they share many properties such as left-to-right assignment order for instruction operands and the synthesis of macro instructions such as MOVE to hide the peculiarities of the load and store structure of the machines. To keep things concrete, the first part of this manual is specifically about the 68020. At the end is a description of the differences among the other assemblers. Registers All pre-defined symbols in the assembler are upper-case. Data registers are R0 through R7; address registers are A0 through A7; floating-point registers are F0 through F7. A pointer in A6 is used by the C compiler to point to data, enabling short addresses to be used more often. The value of A6 is constant and must be set during C program initialization to the address of the externally-defined symbol a6base. The following hardware registers are defined in the assembler; their meaning should be obvious given a 68020 manual: CAAR, CACR, CCR, DFC, ISP, MSP, SFC, SR, USP, and VBR. The assembler also defines several pseudo-registers that manipulate the stack: FP, SP, and TOS. FP is the frame pointer, so 0(FP) is the first argument, 4(FP) is the second, and so on. SP is the local stack pointer, where automatic variables are held (SP is a pseudo-register only on the 68020); 0(SP) is the first automatic, and so on as with FP.