Development of Modified Path Planning Algorithm Using Artificial Potential Field (APF) Based on PSO for Factors Optimization
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Effective Field Theories, Reductionism and Scientific Explanation Stephan
To appear in: Studies in History and Philosophy of Modern Physics Effective Field Theories, Reductionism and Scientific Explanation Stephan Hartmann∗ Abstract Effective field theories have been a very popular tool in quantum physics for almost two decades. And there are good reasons for this. I will argue that effec- tive field theories share many of the advantages of both fundamental theories and phenomenological models, while avoiding their respective shortcomings. They are, for example, flexible enough to cover a wide range of phenomena, and concrete enough to provide a detailed story of the specific mechanisms at work at a given energy scale. So will all of physics eventually converge on effective field theories? This paper argues that good scientific research can be characterised by a fruitful interaction between fundamental theories, phenomenological models and effective field theories. All of them have their appropriate functions in the research process, and all of them are indispens- able. They complement each other and hang together in a coherent way which I shall characterise in some detail. To illustrate all this I will present a case study from nuclear and particle physics. The resulting view about scientific theorising is inherently pluralistic, and has implications for the debates about reductionism and scientific explanation. Keywords: Effective Field Theory; Quantum Field Theory; Renormalisation; Reductionism; Explanation; Pluralism. ∗Center for Philosophy of Science, University of Pittsburgh, 817 Cathedral of Learning, Pitts- burgh, PA 15260, USA (e-mail: [email protected]) (correspondence address); and Sektion Physik, Universit¨at M¨unchen, Theresienstr. 37, 80333 M¨unchen, Germany. 1 1 Introduction There is little doubt that effective field theories are nowadays a very popular tool in quantum physics. -

An Introduction to Supersymmetry
An Introduction to Supersymmetry Ulrich Theis Institute for Theoretical Physics, Friedrich-Schiller-University Jena, Max-Wien-Platz 1, D–07743 Jena, Germany [email protected] This is a write-up of a series of five introductory lectures on global supersymmetry in four dimensions given at the 13th “Saalburg” Summer School 2007 in Wolfersdorf, Germany. Contents 1 Why supersymmetry? 1 2 Weyl spinors in D=4 4 3 The supersymmetry algebra 6 4 Supersymmetry multiplets 6 5 Superspace and superfields 9 6 Superspace integration 11 7 Chiral superfields 13 8 Supersymmetric gauge theories 17 9 Supersymmetry breaking 22 10 Perturbative non-renormalization theorems 26 A Sigma matrices 29 1 Why supersymmetry? When the Large Hadron Collider at CERN takes up operations soon, its main objective, besides confirming the existence of the Higgs boson, will be to discover new physics beyond the standard model of the strong and electroweak interactions. It is widely believed that what will be found is a (at energies accessible to the LHC softly broken) supersymmetric extension of the standard model. What makes supersymmetry such an attractive feature that the majority of the theoretical physics community is convinced of its existence? 1 First of all, under plausible assumptions on the properties of relativistic quantum field theories, supersymmetry is the unique extension of the algebra of Poincar´eand internal symmtries of the S-matrix. If new physics is based on such an extension, it must be supersymmetric. Furthermore, the quantum properties of supersymmetric theories are much better under control than in non-supersymmetric ones, thanks to powerful non- renormalization theorems. -
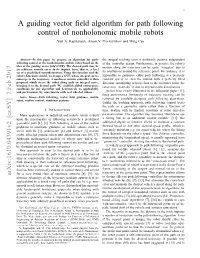
A Guiding Vector Field Algorithm for Path Following Control Of
1 A guiding vector field algorithm for path following control of nonholonomic mobile robots Yuri A. Kapitanyuk, Anton V. Proskurnikov and Ming Cao Abstract—In this paper we propose an algorithm for path- the integral tracking error is uniformly positive independent following control of the nonholonomic mobile robot based on the of the controller design. Furthermore, in practice the robot’s idea of the guiding vector field (GVF). The desired path may be motion along the trajectory can be quite “irregular” due to an arbitrary smooth curve in its implicit form, that is, a level set of a predefined smooth function. Using this function and the its oscillations around the reference point. For instance, it is robot’s kinematic model, we design a GVF, whose integral curves impossible to guarantee either path following at a precisely converge to the trajectory. A nonlinear motion controller is then constant speed, or even the motion with a perfectly fixed proposed which steers the robot along such an integral curve, direction. Attempting to keep close to the reference point, the bringing it to the desired path. We establish global convergence robot may “overtake” it due to unpredictable disturbances. conditions for our algorithm and demonstrate its applicability and performance by experiments with real wheeled robots. As has been clearly illustrated in the influential paper [11], these performance limitations of trajectory tracking can be Index Terms—Path following, vector field guidance, mobile removed by carefully designed path following algorithms. robot, motion control, nonlinear systems Unlike the tracking approach, path following control treats the path as a geometric curve rather than a function of I. -

Towards a Glossary of Activities in the Ontology Engineering Field
View metadata, citation and similar papers at core.ac.uk brought to you by CORE provided by Servicio de Coordinación de Bibliotecas de la Universidad Politécnica de Madrid Towards a Glossary of Activities in the Ontology Engineering Field Mari Carmen Suárez-Figueroa, Asunción Gómez-Pérez Ontology Engineering Group, Universidad Politécnica de Madrid Campus de Montegancedo, Avda. Montepríncipe s/n, Boadilla del Monte, Madrid, Spain E-mail: [email protected], [email protected] Abstract The Semantic Web of the future will be characterized by using a very large number of ontologies embedded in ontology networks. It is important to provide strong methodological support for collaborative and context-sensitive development of networks of ontologies. This methodological support includes the identification and definition of which activities should be carried out when ontology networks are collaboratively built. In this paper we present the consensus reaching process followed within the NeOn consortium for the identification and definition of the activities involved in the ontology network development process. The consensus reaching process here presented produces as a result the NeOn Glossary of Activities. This work was conceived due to the lack of standardization in the Ontology Engineering terminology, which clearly contrasts with the Software Engineering field. Our future aim is to standardize the NeOn Glossary of Activities. field of knowledge. In the case of IEEE Standard Glossary 1. Introduction of Software Engineering Terminology (IEEE, 1990), this The Semantic Web of the future will be characterized by glossary identifies terms in use in the field of Software using a very large number of ontologies embedded in Engineering and establishes standard definitions for those ontology networks built by distributed teams (NeOn terms. -

Introduction to Conformal Field Theory and String
SLAC-PUB-5149 December 1989 m INTRODUCTION TO CONFORMAL FIELD THEORY AND STRING THEORY* Lance J. Dixon Stanford Linear Accelerator Center Stanford University Stanford, CA 94309 ABSTRACT I give an elementary introduction to conformal field theory and its applications to string theory. I. INTRODUCTION: These lectures are meant to provide a brief introduction to conformal field -theory (CFT) and string theory for those with no prior exposure to the subjects. There are many excellent reviews already available (or almost available), and most of these go in to much more detail than I will be able to here. Those reviews con- centrating on the CFT side of the subject include refs. 1,2,3,4; those emphasizing string theory include refs. 5,6,7,8,9,10,11,12,13 I will start with a little pre-history of string theory to help motivate the sub- ject. In the 1960’s it was noticed that certain properties of the hadronic spectrum - squared masses for resonances that rose linearly with the angular momentum - resembled the excitations of a massless, relativistic string.14 Such a string is char- *Work supported in by the Department of Energy, contract DE-AC03-76SF00515. Lectures presented at the Theoretical Advanced Study Institute In Elementary Particle Physics, Boulder, Colorado, June 4-30,1989 acterized by just one energy (or length) scale,* namely the square root of the string tension T, which is the energy per unit length of a static, stretched string. For strings to describe the strong interactions fi should be of order 1 GeV. Although strings provided a qualitative understanding of much hadronic physics (and are still useful today for describing hadronic spectra 15 and fragmentation16), some features were hard to reconcile. -

TASI 2008 Lectures: Introduction to Supersymmetry And
TASI 2008 Lectures: Introduction to Supersymmetry and Supersymmetry Breaking Yuri Shirman Department of Physics and Astronomy University of California, Irvine, CA 92697. [email protected] Abstract These lectures, presented at TASI 08 school, provide an introduction to supersymmetry and supersymmetry breaking. We present basic formalism of supersymmetry, super- symmetric non-renormalization theorems, and summarize non-perturbative dynamics of supersymmetric QCD. We then turn to discussion of tree level, non-perturbative, and metastable supersymmetry breaking. We introduce Minimal Supersymmetric Standard Model and discuss soft parameters in the Lagrangian. Finally we discuss several mech- anisms for communicating the supersymmetry breaking between the hidden and visible sectors. arXiv:0907.0039v1 [hep-ph] 1 Jul 2009 Contents 1 Introduction 2 1.1 Motivation..................................... 2 1.2 Weylfermions................................... 4 1.3 Afirstlookatsupersymmetry . .. 5 2 Constructing supersymmetric Lagrangians 6 2.1 Wess-ZuminoModel ............................... 6 2.2 Superfieldformalism .............................. 8 2.3 VectorSuperfield ................................. 12 2.4 Supersymmetric U(1)gaugetheory ....................... 13 2.5 Non-abeliangaugetheory . .. 15 3 Non-renormalization theorems 16 3.1 R-symmetry.................................... 17 3.2 Superpotentialterms . .. .. .. 17 3.3 Gaugecouplingrenormalization . ..... 19 3.4 D-termrenormalization. ... 20 4 Non-perturbative dynamics in SUSY QCD 20 4.1 Affleck-Dine-Seiberg -

Multidisciplinary Design Project Engineering Dictionary Version 0.0.2
Multidisciplinary Design Project Engineering Dictionary Version 0.0.2 February 15, 2006 . DRAFT Cambridge-MIT Institute Multidisciplinary Design Project This Dictionary/Glossary of Engineering terms has been compiled to compliment the work developed as part of the Multi-disciplinary Design Project (MDP), which is a programme to develop teaching material and kits to aid the running of mechtronics projects in Universities and Schools. The project is being carried out with support from the Cambridge-MIT Institute undergraduate teaching programe. For more information about the project please visit the MDP website at http://www-mdp.eng.cam.ac.uk or contact Dr. Peter Long Prof. Alex Slocum Cambridge University Engineering Department Massachusetts Institute of Technology Trumpington Street, 77 Massachusetts Ave. Cambridge. Cambridge MA 02139-4307 CB2 1PZ. USA e-mail: [email protected] e-mail: [email protected] tel: +44 (0) 1223 332779 tel: +1 617 253 0012 For information about the CMI initiative please see Cambridge-MIT Institute website :- http://www.cambridge-mit.org CMI CMI, University of Cambridge Massachusetts Institute of Technology 10 Miller’s Yard, 77 Massachusetts Ave. Mill Lane, Cambridge MA 02139-4307 Cambridge. CB2 1RQ. USA tel: +44 (0) 1223 327207 tel. +1 617 253 7732 fax: +44 (0) 1223 765891 fax. +1 617 258 8539 . DRAFT 2 CMI-MDP Programme 1 Introduction This dictionary/glossary has not been developed as a definative work but as a useful reference book for engi- neering students to search when looking for the meaning of a word/phrase. It has been compiled from a number of existing glossaries together with a number of local additions. -

Aspects of Supersymmetry and Its Breaking
1 Aspects of Supersymmetry and its Breaking a b Thomas T. Dumitrescu ∗ and Zohar Komargodski † aDepartment of Physics, Princeton University, Princeton, New Jersey, 08544, USA bSchool of Natural Sciences, Institute for Advanced Study, Princeton, New Jersey, 08540, USA We describe some basic aspects of supersymmetric field theories, emphasizing the structure of various supersym- metry multiplets. In particular, we discuss supercurrents – multiplets which contain the supersymmetry current and the energy-momentum tensor – and explain how they can be used to constrain the dynamics of supersym- metric field theories, supersymmetry breaking, and supergravity. These notes are based on lectures delivered at the Carg´ese Summer School 2010 on “String Theory: Formal Developments and Applications,” and the CERN Winter School 2011 on “Supergravity, Strings, and Gauge Theory.” 1. Supersymmetric Theories In this review we will describe some basic aspects of SUSY field theories, emphasizing the structure 1.1. Supermultiplets and Superfields of various supermultiplets – especially those con- A four-dimensional theory possesses = 1 taining the supersymmetry current. In particu- supersymmetry (SUSY) if it contains Na con- 1 lar, we will show how these supercurrents can be served spin- 2 charge Qα which satisfies the anti- used to study the dynamics of supersymmetric commutation relation field theories, SUSY-breaking, and supergravity. ¯ µ Qα, Qα˙ = 2σαα˙ Pµ . (1) We begin by recalling basic facts about super- { } multiplets and superfields. A set of bosonic and Here Q¯ is the Hermitian conjugate of Q . (We α˙ α fermionic operators B(x) and F (x) fur- will use bars throughout to denote Hermitian con- i i nishes a supermultiplet{O if these} operators{O satisfy} jugation.) Unless otherwise stated, we follow the commutation relations of the schematic form conventions of [1]. -

Introduction to Supersymmetry
Introduction to Supersymmetry Pre-SUSY Summer School Corpus Christi, Texas May 15-18, 2019 Stephen P. Martin Northern Illinois University [email protected] 1 Topics: Why: Motivation for supersymmetry (SUSY) • What: SUSY Lagrangians, SUSY breaking and the Minimal • Supersymmetric Standard Model, superpartner decays Who: Sorry, not covered. • For some more details and a slightly better attempt at proper referencing: A supersymmetry primer, hep-ph/9709356, version 7, January 2016 • TASI 2011 lectures notes: two-component fermion notation and • supersymmetry, arXiv:1205.4076. If you find corrections, please do let me know! 2 Lecture 1: Motivation and Introduction to Supersymmetry Motivation: The Hierarchy Problem • Supermultiplets • Particle content of the Minimal Supersymmetric Standard Model • (MSSM) Need for “soft” breaking of supersymmetry • The Wess-Zumino Model • 3 People have cited many reasons why extensions of the Standard Model might involve supersymmetry (SUSY). Some of them are: A possible cold dark matter particle • A light Higgs boson, M = 125 GeV • h Unification of gauge couplings • Mathematical elegance, beauty • ⋆ “What does that even mean? No such thing!” – Some modern pundits ⋆ “We beg to differ.” – Einstein, Dirac, . However, for me, the single compelling reason is: The Hierarchy Problem • 4 An analogy: Coulomb self-energy correction to the electron’s mass A point-like electron would have an infinite classical electrostatic energy. Instead, suppose the electron is a solid sphere of uniform charge density and radius R. An undergraduate problem gives: 3e2 ∆ECoulomb = 20πǫ0R 2 Interpreting this as a correction ∆me = ∆ECoulomb/c to the electron mass: 15 0.86 10− meters m = m + (1 MeV/c2) × . -

Lectures on Effective Field Theories
Adam Falkowski Lectures on Effective Field Theories Version of September 21, 2020 Abstract Effective field theories (EFTs) are widely used in particle physics and well beyond. The basic idea is to approximate a physical system by integrating out the degrees of freedom that are not relevant in a given experimental setting. These are traded for a set of effective interactions between the remaining degrees of freedom. In these lectures I review the concept, techniques, and applications of the EFT framework. The 1st lecture gives an overview of the EFT landscape. I will review the philosophy, basic techniques, and applications of EFTs. A few prominent examples, such as the Fermi theory, the Euler-Heisenberg Lagrangian, and the SMEFT, are presented to illustrate some salient features of the EFT. In the 2nd lecture I discuss quantitatively the procedure of integrating out heavy particles in a quantum field theory. An explicit example of the tree- and one-loop level matching between an EFT and its UV completion will be discussed in all gory details. The 3rd lecture is devoted to path integral methods of calculating effective Lagrangians. Finally, in the 4th lecture I discuss the EFT approach to constraining new physics beyond the Standard Model (SM). To this end, the so- called SM EFT is introduced, where the SM Lagrangian is extended by a set of non- renormalizable interactions representing the effects of new heavy particles. 1 Contents 1 Illustrated philosophy of EFT3 1.1 Introduction..................................3 1.2 Scaling and power counting.........................6 1.3 Illustration #1: Fermi theory........................8 1.4 Illustration #2: Euler-Heisenberg Lagrangian.............. -

String Field Theory, Nucl
1 String field theory W. TAYLOR MIT, Stanford University SU-ITP-06/14 MIT-CTP-3747 hep-th/0605202 Abstract This elementary introduction to string field theory highlights the fea- tures and the limitations of this approach to quantum gravity as it is currently understood. String field theory is a formulation of string the- ory as a field theory in space-time with an infinite number of massive fields. Although existing constructions of string field theory require ex- panding around a fixed choice of space-time background, the theory is in principle background-independent, in the sense that different back- grounds can be realized as different field configurations in the theory. String field theory is the only string formalism developed so far which, in principle, has the potential to systematically address questions involv- ing multiple asymptotically distinct string backgrounds. Thus, although it is not yet well defined as a quantum theory, string field theory may eventually be helpful for understanding questions related to cosmology arXiv:hep-th/0605202v2 28 Jun 2006 in string theory. 1.1 Introduction In the early days of the subject, string theory was understood only as a perturbative theory. The theory arose from the study of S-matrices and was conceived of as a new class of theory describing perturbative interactions of massless particles including the gravitational quanta, as well as an infinite family of massive particles associated with excited string states. In string theory, instead of the one-dimensional world line 1 2 W. Taylor of a pointlike particle tracing out a path through space-time, a two- dimensional surface describes the trajectory of an oscillating loop of string, which appears pointlike only to an observer much larger than the string. -

Quantum Gravity, Effective Fields and String Theory
Quantum gravity, effective fields and string theory Niels Emil Jannik Bjerrum-Bohr The Niels Bohr Institute University of Copenhagen arXiv:hep-th/0410097v1 10 Oct 2004 Thesis submitted for the degree of Doctor of Philosophy in Physics at the Niels Bohr Institute, University of Copenhagen. 28th July 2 Abstract In this thesis we will look into some of the various aspects of treating general relativity as a quantum theory. The thesis falls in three parts. First we briefly study how gen- eral relativity can be consistently quantized as an effective field theory, and we focus on the concrete results of such a treatment. As a key achievement of the investigations we present our calculations of the long-range low-energy leading quantum corrections to both the Schwarzschild and Kerr metrics. The leading quantum corrections to the pure gravitational potential between two sources are also calculated, both in the mixed theory of scalar QED and quantum gravity and in the pure gravitational theory. Another part of the thesis deals with the (Kawai-Lewellen-Tye) string theory gauge/gravity relations. Both theories are treated as effective field theories, and we investigate if the KLT oper- ator mapping is extendable to the case of higher derivative operators. The constraints, imposed by the KLT-mapping on the effective coupling constants, are also investigated. The KLT relations are generalized, taking the effective field theory viewpoint, and it is noticed that some remarkable tree-level amplitude relations exist between the field the- ory operators. Finally we look at effective quantum gravity treated from the perspective of taking the limit of infinitely many spatial dimensions.