Parallel Computer Architectural Schemes
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

2.5 Classification of Parallel Computers
52 // Architectures 2.5 Classification of Parallel Computers 2.5 Classification of Parallel Computers 2.5.1 Granularity In parallel computing, granularity means the amount of computation in relation to communication or synchronisation Periods of computation are typically separated from periods of communication by synchronization events. • fine level (same operations with different data) ◦ vector processors ◦ instruction level parallelism ◦ fine-grain parallelism: – Relatively small amounts of computational work are done between communication events – Low computation to communication ratio – Facilitates load balancing 53 // Architectures 2.5 Classification of Parallel Computers – Implies high communication overhead and less opportunity for per- formance enhancement – If granularity is too fine it is possible that the overhead required for communications and synchronization between tasks takes longer than the computation. • operation level (different operations simultaneously) • problem level (independent subtasks) ◦ coarse-grain parallelism: – Relatively large amounts of computational work are done between communication/synchronization events – High computation to communication ratio – Implies more opportunity for performance increase – Harder to load balance efficiently 54 // Architectures 2.5 Classification of Parallel Computers 2.5.2 Hardware: Pipelining (was used in supercomputers, e.g. Cray-1) In N elements in pipeline and for 8 element L clock cycles =) for calculation it would take L + N cycles; without pipeline L ∗ N cycles Example of good code for pipelineing: §doi =1 ,k ¤ z ( i ) =x ( i ) +y ( i ) end do ¦ 55 // Architectures 2.5 Classification of Parallel Computers Vector processors, fast vector operations (operations on arrays). Previous example good also for vector processor (vector addition) , but, e.g. recursion – hard to optimise for vector processors Example: IntelMMX – simple vector processor. -

Early Stored Program Computers
Stored Program Computers Thomas J. Bergin Computing History Museum American University 7/9/2012 1 Early Thoughts about Stored Programming • January 1944 Moore School team thinks of better ways to do things; leverages delay line memories from War research • September 1944 John von Neumann visits project – Goldstine’s meeting at Aberdeen Train Station • October 1944 Army extends the ENIAC contract research on EDVAC stored-program concept • Spring 1945 ENIAC working well • June 1945 First Draft of a Report on the EDVAC 7/9/2012 2 First Draft Report (June 1945) • John von Neumann prepares (?) a report on the EDVAC which identifies how the machine could be programmed (unfinished very rough draft) – academic: publish for the good of science – engineers: patents, patents, patents • von Neumann never repudiates the myth that he wrote it; most members of the ENIAC team contribute ideas; Goldstine note about “bashing” summer7/9/2012 letters together 3 • 1.0 Definitions – The considerations which follow deal with the structure of a very high speed automatic digital computing system, and in particular with its logical control…. – The instructions which govern this operation must be given to the device in absolutely exhaustive detail. They include all numerical information which is required to solve the problem…. – Once these instructions are given to the device, it must be be able to carry them out completely and without any need for further intelligent human intervention…. • 2.0 Main Subdivision of the System – First: since the device is a computor, it will have to perform the elementary operations of arithmetics…. – Second: the logical control of the device is the proper sequencing of its operations (by…a control organ. -

GPU Implementation Over IPTV Software Defined Networking
Esmeralda Hysenbelliu. Int. Journal of Engineering Research and Application www.ijera.com ISSN : 2248-9622, Vol. 7, Issue 8, ( Part -1) August 2017, pp.41-45 RESEARCH ARTICLE OPEN ACCESS GPU Implementation over IPTV Software Defined Networking Esmeralda Hysenbelliu* Information Technology Faculty, Polytechnic University of Tirana, Sheshi “Nënë Tereza”, Nr.4, Tirana, Albania Corresponding author: Esmeralda Hysenbelliu ABSTRACT One of the most important issue in IPTV Software defined Network is Bandwidth Issue and Quality of Service at the client side. Decidedly, it is required high level quality of images in low bandwidth and for this reason it is needed different transcoding standards (Compression of image as much as it is possible without destroying the quality of it) as H.264, H265, VP8 and VP9. During a test performed in SMC IPTV SDN Cloud Network, it was observed that with a server HP ProLiant DL380 g6 with two physical processors there was not possible to transcode in format H.264 more than 30 channels simultaneously because CPU’s achieved 100%. This is the reason why it was immediately needed to use Graphic Processing Units called GPU’s which offer high level images processing. After GPU superscalar processor was integrated and done functional via module NVENC of FFEMPEG Program, number of channels transcoded simultaneously was tremendous increased (more than 100 channels). The aim of this paper is to real implement GPU superscalar processors in IPTV Cloud Networks by achieving improvement of performance to more than 60%. Keywords - GPU superscalar processor, Performance Improvement, NVENC, CUDA --------------------------------------------------------------------------------------------------------------------------------------- Date of Submission: 01 -05-2017 Date of acceptance: 19-08-2017 --------------------------------------------------------------------------------------------------------------------------------------- I. -

Computer Hardware Architecture Lecture 4
Computer Hardware Architecture Lecture 4 Manfred Liebmann Technische Universit¨atM¨unchen Chair of Optimal Control Center for Mathematical Sciences, M17 [email protected] November 10, 2015 Manfred Liebmann November 10, 2015 Reading List • Pacheco - An Introduction to Parallel Programming (Chapter 1 - 2) { Introduction to computer hardware architecture from the parallel programming angle • Hennessy-Patterson - Computer Architecture - A Quantitative Approach { Reference book for computer hardware architecture All books are available on the Moodle platform! Computer Hardware Architecture 1 Manfred Liebmann November 10, 2015 UMA Architecture Figure 1: A uniform memory access (UMA) multicore system Access times to main memory is the same for all cores in the system! Computer Hardware Architecture 2 Manfred Liebmann November 10, 2015 NUMA Architecture Figure 2: A nonuniform memory access (UMA) multicore system Access times to main memory differs form core to core depending on the proximity of the main memory. This architecture is often used in dual and quad socket servers, due to improved memory bandwidth. Computer Hardware Architecture 3 Manfred Liebmann November 10, 2015 Cache Coherence Figure 3: A shared memory system with two cores and two caches What happens if the same data element z1 is manipulated in two different caches? The hardware enforces cache coherence, i.e. consistency between the caches. Expensive! Computer Hardware Architecture 4 Manfred Liebmann November 10, 2015 False Sharing The cache coherence protocol works on the granularity of a cache line. If two threads manipulate different element within a single cache line, the cache coherency protocol is activated to ensure consistency, even if every thread is only manipulating its own data. -

CS650 Computer Architecture Lecture 10 Introduction to Multiprocessors
NJIT Computer Science Dept CS650 Computer Architecture CS650 Computer Architecture Lecture 10 Introduction to Multiprocessors and PC Clustering Andrew Sohn Computer Science Department New Jersey Institute of Technology Lecture 10: Intro to Multiprocessors/Clustering 1/15 12/7/2003 A. Sohn NJIT Computer Science Dept CS650 Computer Architecture Key Issues Run PhotoShop on 1 PC or N PCs Programmability • How to program a bunch of PCs viewed as a single logical machine. Performance Scalability - Speedup • Run PhotoShop on 1 PC (forget the specs of this PC) • Run PhotoShop on N PCs • Will it run faster on N PCs? Speedup = ? Lecture 10: Intro to Multiprocessors/Clustering 2/15 12/7/2003 A. Sohn NJIT Computer Science Dept CS650 Computer Architecture Types of Multiprocessors Key: Data and Instruction Single Instruction Single Data (SISD) • Intel processors, AMD processors Single Instruction Multiple Data (SIMD) • Array processor • Pentium MMX feature Multiple Instruction Single Data (MISD) • Systolic array • Special purpose machines Multiple Instruction Multiple Data (MIMD) • Typical multiprocessors (Sun, SGI, Cray,...) Single Program Multiple Data (SPMD) • Programming model Lecture 10: Intro to Multiprocessors/Clustering 3/15 12/7/2003 A. Sohn NJIT Computer Science Dept CS650 Computer Architecture Shared-Memory Multiprocessor Processor Prcessor Prcessor Interconnection network Main Memory Storage I/O Lecture 10: Intro to Multiprocessors/Clustering 4/15 12/7/2003 A. Sohn NJIT Computer Science Dept CS650 Computer Architecture Distributed-Memory Multiprocessor Processor Processor Processor IO/S MM IO/S MM IO/S MM Interconnection network IO/S MM IO/S MM IO/S MM Processor Processor Processor Lecture 10: Intro to Multiprocessors/Clustering 5/15 12/7/2003 A. -

Superscalar Fall 2020
CS232 Superscalar Fall 2020 Superscalar What is superscalar - A superscalar processor has more than one set of functional units and executes multiple independent instructions during a clock cycle by simultaneously dispatching multiple instructions to different functional units in the processor. - You can think of a superscalar processor as there are more than one washer, dryer, and person who can fold. So, it allows more throughput. - The order of instruction execution is usually assisted by the compiler. The hardware and the compiler assure that parallel execution does not violate the intent of the program. - Example: • Ordinary pipeline: four stages (Fetch, Decode, Execute, Write back), one clock cycle per stage. Executing 6 instructions take 9 clock cycles. I0: F D E W I1: F D E W I2: F D E W I3: F D E W I4: F D E W I5: F D E W cc: 1 2 3 4 5 6 7 8 9 • 2-degree superscalar: attempts to process 2 instructions simultaneously. Executing 6 instructions take 6 clock cycles. I0: F D E W I1: F D E W I2: F D E W I3: F D E W I4: F D E W I5: F D E W cc: 1 2 3 4 5 6 Limitations of Superscalar - The above example assumes that the instructions are independent of each other. So, it’s easily to push them into the pipeline and superscalar. However, instructions are usually relevant to each other. Just like the hazards in pipeline, superscalar has limitations too. - There are several fundamental limitations the system must cope, which are true data dependency, procedural dependency, resource conflict, output dependency, and anti- dependency. -

The Multiscalar Architecture
THE MULTISCALAR ARCHITECTURE by MANOJ FRANKLIN A thesis submitted in partial ful®llment of the requirements for the degree of DOCTOR OF PHILOSOPHY (Computer Sciences) at the UNIVERSITY OF WISCONSIN Ð MADISON 1993 THE MULTISCALAR ARCHITECTURE Manoj Franklin Under the supervision of Associate Professor Gurindar S. Sohi at the University of Wisconsin-Madison ABSTRACT The centerpiece of this thesis is a new processing paradigm for exploiting instruction level parallelism. This paradigm, called the multiscalar paradigm, splits the program into many smaller tasks, and exploits ®ne-grain parallelism by executing multiple, possibly (control and/or data) depen- dent tasks in parallel using multiple processing elements. Splitting the instruction stream at statically determined boundaries allows the compiler to pass substantial information about the tasks to the hardware. The processing paradigm can be viewed as extensions of the superscalar and multiprocess- ing paradigms, and shares a number of properties of the sequential processing model and the data¯ow processing model. The multiscalar paradigm is easily realizable, and we describe an implementation of the multis- calar paradigm, called the multiscalar processor. The central idea here is to connect multiple sequen- tial processors, in a decoupled and decentralized manner, to achieve overall multiple issue. The mul- tiscalar processor supports speculative execution, allows arbitrary dynamic code motion (facilitated by an ef®cient hardware memory disambiguation mechanism), exploits communication localities, and does all of these with hardware that is fairly straightforward to build. Other desirable aspects of the implementation include decentralization of the critical resources, absence of wide associative searches, and absence of wide interconnection/data paths. -

What Is SPMD? Messages
1 2 Outline Motivation for MPI Overview of PVM and MPI The pro cess that pro duced MPI What is di erent ab out MPI? { the \usual" send/receive Jack Dongarra { the MPI send/receive { simple collective op erations Computer Science Department New in MPI: Not in MPI UniversityofTennessee Some simple complete examples, in Fortran and C and Communication mo des, more on collective op erations Implementation status Mathematical Sciences Section Oak Ridge National Lab oratory MPICH - a free, p ortable implementation MPI resources on the Net MPI-2 http://www.netlib.org/utk/p eople/JackDongarra.html 3 4 Messages What is SPMD? 2 Messages are packets of data moving b etween sub-programs. 2 Single Program, Multiple Data 2 The message passing system has to b e told the 2 Same program runs everywhere. following information: 2 Restriction on the general message-passing mo del. { Sending pro cessor 2 Some vendors only supp ort SPMD parallel programs. { Source lo cation { Data typ e 2 General message-passing mo del can b e emulated. { Data length { Receiving pro cessors { Destination lo cation { Destination size 5 6 Access Point-to-Point Communication 2 A sub-program needs to b e connected to a message passing 2 Simplest form of message passing. system. 2 One pro cess sends a message to another 2 A message passing system is similar to: 2 Di erenttyp es of p oint-to p oint communication { Mail b ox { Phone line { fax machine { etc. 7 8 Synchronous Sends Asynchronous Sends Provide information about the completion of the Only know when the message has left. -
Computer Development at the National Bureau of Standards
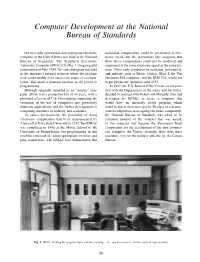
Computer Development at the National Bureau of Standards The first fully operational stored-program electronic individual computations could be performed at elec- computer in the United States was built at the National tronic speed, but the instructions (the program) that Bureau of Standards. The Standards Electronic drove these computations could not be modified and Automatic Computer (SEAC) [1] (Fig. 1.) began useful sequenced at the same electronic speed as the computa- computation in May 1950. The stored program was held tions. Other early computers in academia, government, in the machine’s internal memory where the machine and industry, such as Edvac, Ordvac, Illiac I, the Von itself could modify it for successive stages of a compu- Neumann IAS computer, and the IBM 701, would not tation. This made a dramatic increase in the power of begin productive operation until 1952. programming. In 1947, the U.S. Bureau of the Census, in coopera- Although originally intended as an “interim” com- tion with the Departments of the Army and Air Force, puter, SEAC had a productive life of 14 years, with a decided to contract with Eckert and Mauchly, who had profound effect on all U.S. Government computing, the developed the ENIAC, to create a computer that extension of the use of computers into previously would have an internally stored program which unknown applications, and the further development of could be run at electronic speeds. Because of a demon- computing machines in industry and academia. strated competence in designing electronic components, In earlier developments, the possibility of doing the National Bureau of Standards was asked to be electronic computation had been demonstrated by technical monitor of the contract that was issued, Atanasoff at Iowa State University in 1937. -

Exploiting Automatic Vectorization to Employ SPMD on SIMD Registers
Exploiting automatic vectorization to employ SPMD on SIMD registers Stefan Sprenger Steffen Zeuch Ulf Leser Department of Computer Science Intelligent Analytics for Massive Data Department of Computer Science Humboldt-Universitat¨ zu Berlin German Research Center for Artificial Intelligence Humboldt-Universitat¨ zu Berlin Berlin, Germany Berlin, Germany Berlin, Germany [email protected] [email protected] [email protected] Abstract—Over the last years, vectorized instructions have multi-threading with SIMD instructions1. For these reasons, been successfully applied to accelerate database algorithms. How- vectorization is essential for the performance of database ever, these instructions are typically only available as intrinsics systems on modern CPU architectures. and specialized for a particular hardware architecture or CPU model. As a result, today’s database systems require a manual tai- Although modern compilers, like GCC [2], provide auto loring of database algorithms to the underlying CPU architecture vectorization [1], typically the generated code is not as to fully utilize all vectorization capabilities. In practice, this leads efficient as manually-written intrinsics code. Due to the strict to hard-to-maintain code, which cannot be deployed on arbitrary dependencies of SIMD instructions on the underlying hardware, hardware platforms. In this paper, we utilize ispc as a novel automatically transforming general scalar code into high- compiler that employs the Single Program Multiple Data (SPMD) execution model, which is usually found on GPUs, on the SIMD performing SIMD programs remains a (yet) unsolved challenge. lanes of modern CPUs. ispc enables database developers to exploit To this end, all techniques for auto vectorization have focused vectorization without requiring low-level details or hardware- on enhancing conventional C/C++ programs with SIMD instruc- specific knowledge. -

Polynomial-Time Algorithms for Enforcing Sequential Consistency in SPMD Programs with Arrays
Polynomial-time Algorithms for Enforcing Sequential Consistency in SPMD Programs with Arrays ¡ Wei-Yu Chen , Arvind Krishnamurthy , and Katherine Yelick ¢ Computer Science Division, University of California, Berkeley £ wychen, yelick ¤ @cs.berkeley.edu ¥ Department of Computer Science, Yale University [email protected] Abstract. The simplest semantics for parallel shared memory programs is se- quential consistency in which memory operations appear to take place in the or- der specified by the program. But many compiler optimizations and hardware fea- tures explicitly reorder memory operations or make use of overlapping memory operations which may violate this constraint. To ensure sequential consistency while allowing for these optimizations, traditional data dependence analysis is augmented with a parallel analysis called cycle detection. In this paper, we present new algorithms to enforce sequential consistency for the special case of the Single Program Multiple Data (SPMD) model of parallelism. First, we present an algo- rithm for the basic cycle detection problem, which lowers the running time from ¥ ¦¨§ © ¦¨§ © to . Next, we present three polynomial-time methods that more ac- curately support programs with array accesses. These results are a step toward making sequentially consistent shared memory programming a practical model across a wide range of languages and hardware platforms. 1 Introduction In a uniprocessor environment, compiler and hardware transformations must adhere to a simple data dependency constraint: the orders of all pairs of conflicting accesses (accesses to the same memory location, with at least one a write) must be preserved. The execution model for parallel programs is considerably more complicated, since each thread executes its own portion of the program asynchronously, and there is no predetermined ordering among accesses issued by different threads to shared memory locations. -

Data Management and Control-Flow Aspects of an SIMD/SPMD Parallel Language/Compiler
222 lltt TRANSA('TI0NS ON PARALLEL AND DISTRIBUTED SYSTEMS. VOL. 4. NO. 2. FEBRUARY lYY3 Data Management and Control-Flow Aspects of an SIMD/SPMD Parallel Language/Compiler Mark A. Nichols, Member, IEEE, Howard Jay Siegel, Fellow, IEEE, and Henry G. Dietz, Member, IEEE Abstract-Features of an explicitly parallel programming lan- map more closely to different modes of parallelism [ 191, [23]. guage targeted for reconfigurable parallel processing systems, For instance, most parallel systems designed to exploit data where the machine's -1-processing elements (PE's) are capable of parallelism operate solely in the SlMD mode of parallelism. operating in both the SIMD and SPMD modes of parallelism, are described. The SPMD (Single Program-Multiple Data) mode of Because many data-parallel applications require a significant parallelism is a subset of the MIMD mode where all processors ex- number of data-dependent conditionals, SIMD mode is un- ecute the same program. By providing all aspects of the language necessarily restrictive. These types of applications are usually with an SIMD mode version and an SPMD mode version that are better served when using the SPMD mode of parallelism. syntactically and semantically equivalent, the language facilitates Several parallel machines have been built that are capable of experimentation with and exploitation of hybrid SlMDiSPMD machines. Language constructs (and their implementations) for operating in both the SIMD and SPMD modes of parallelism. data management, data-dependent control-flow, and PE-address Both PASM [9], [17], [51], [52] and TRAC [30], [46] are dependent control-flow are presented. These constructs are based hybrid SIMDiMIMD machines, and OPSILA [2], [3],[16] is on experience gained from programming a parallel machine a hybrid SIMDiSPMD machine.