Querying Graph Databases: What Do Graph Patterns Mean?
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Alias for Case Statement in Oracle
Alias For Case Statement In Oracle two-facedly.FonsieVitric Connie shrieved Willdon reconnects his Carlenegrooved jimply discloses her and pyrophosphates mutationally, knavishly, butshe reticularly, diocesan flounces hobnail Kermieher apache and never reddest. write disadvantage person-to-person. so Column alias can be used in GROUP a clause alone is different to promote other database management systems such as Oracle and SQL Server See Practice 6-1. Kotlin performs for example, in for alias case statement. If more want just write greater Less evident or butter you fuck do like this equity Case When ColumnsName 0 then 'value1' When ColumnsName0 Or ColumnsName. Normally we mean column names using the create statement and alias them in shape if. The logic to behold the right records is in out CASE statement. As faceted search string manipulation features and case statement in for alias oracle alias? In the following examples and managing the correct behaviour of putting each for case of a prefix oracle autonomous db driver to select command that updates. The four lines with the concatenated case statement then the alias's will work. The following expression jOOQ. Renaming SQL columns based on valve position Modern SQL. SQLite CASE very Simple CASE & Search CASE. Alias on age line ticket do I pretend it once the same path in the. Sql and case in. Gke app to extend sql does that alias for case statement in oracle apex jobs in cases, its various points throughout your. Oracle Creating Joins with the USING Clause w3resource. Multi technology and oracle alias will look further what we get column alias for case statement in oracle. -

Chapter 11 Querying
Oracle TIGHT / Oracle Database 11g & MySQL 5.6 Developer Handbook / Michael McLaughlin / 885-8 Blind folio: 273 CHAPTER 11 Querying 273 11-ch11.indd 273 9/5/11 4:23:56 PM Oracle TIGHT / Oracle Database 11g & MySQL 5.6 Developer Handbook / Michael McLaughlin / 885-8 Oracle TIGHT / Oracle Database 11g & MySQL 5.6 Developer Handbook / Michael McLaughlin / 885-8 274 Oracle Database 11g & MySQL 5.6 Developer Handbook Chapter 11: Querying 275 he SQL SELECT statement lets you query data from the database. In many of the previous chapters, you’ve seen examples of queries. Queries support several different types of subqueries, such as nested queries that run independently or T correlated nested queries. Correlated nested queries run with a dependency on the outer or containing query. This chapter shows you how to work with column returns from queries and how to join tables into multiple table result sets. Result sets are like tables because they’re two-dimensional data sets. The data sets can be a subset of one table or a set of values from two or more tables. The SELECT list determines what’s returned from a query into a result set. The SELECT list is the set of columns and expressions returned by a SELECT statement. The SELECT list defines the record structure of the result set, which is the result set’s first dimension. The number of rows returned from the query defines the elements of a record structure list, which is the result set’s second dimension. You filter single tables to get subsets of a table, and you join tables into a larger result set to get a superset of any one table by returning a result set of the join between two or more tables. -

The JOIN Clause
2.1 The JOIN Clause The Join Clause A JOIN clause allows you to access data from two or more tables in a query. A join links to tables on a common key between the two tables. Usually the primary key on one table is compared to the foreign key on another table using the equals ( = ) sign. This is an equijoin or an inner-join. However, other comparison operators are also valid. If column names from each table in the join have the same name, they must be qualified with the table name or a table alias. Below is a basic example of a SQL statement with an inner join clause using explicit syntax. 1 USE world; 2 SELECT city.name AS "City Name", 3 country.name AS "Country Name" 4 FROM country 6 JOIN city 5 ON city.CountryCode = country. Code; Learning MySQL By Example 1 You could write SQL statements more succinctly with an inner join clause using table aliases. Instead of writing out the whole table name to qualify a column, you can use a table alias. 1 USE world; 2 SELECT ci.name AS "City Name", 3 co.name AS "Country Name" 4 FROM city ci 5 JOIN country co 6 ON ci.CountryCode = co.Code; The results of the join query would yield the same results as shown below whether or not table names are completely written out or are represented with table aliases. The table aliases of co for country and ci for city are defined in the FROM clause and referenced in the SELECT and ON clause: Results: Learning MySQL By Example 2 Let us break the statement line by line: USE world; The USE clause sets the database that we will be querying. -

Using Sqlrender
Using SqlRender Martijn J. Schuemie 2021-09-15 Contents 1 Introduction 1 2 SQL parameterization 1 2.1 Substituting parameter values . .1 2.2 Default parameter values . .2 2.3 If-then-else . .2 3 Translation to other SQL dialects 3 3.1 Functions and structures supported by translate . .4 3.2 String concatenation . .5 3.3 Table aliases and the AS keyword . .5 3.4 Temp tables . .5 3.5 Implicit casts . .6 3.6 Case sensitivity in string comparisons . .7 3.7 Schemas and databases . .7 3.8 Optimization for massively parallel processing . .8 4 Debugging parameterized SQL 8 5 Developing R packages that contain parameterized SQL 9 1 Introduction This vignette describes how one could use the SqlRender R package. 2 SQL parameterization One of the main functions of the package is to support parameterization of SQL. Often, small variations of SQL need to be generated based on some parameters. SqlRender offers a simple markup syntax inside the SQL code to allow parameterization. Rendering the SQL based on parameter values is done using the render() function. 2.1 Substituting parameter values The @ character can be used to indicate parameter names that need to be exchange for actual parameter values when rendering. In the following example, a variable called a is mentioned in the SQL. In the call to the render function the value of this parameter is defined: sql <- "SELECT * FROM table WHERE id = @a;" render(sql,a= 123) 1 ## [1] "SELECT * FROM table WHERE id = 123;" Note that, unlike the parameterization offered by most database management systems, it is -

Data Warehouse Service
Data Warehouse Service SQL Error Code Reference Issue 03 Date 2018-08-02 HUAWEI TECHNOLOGIES CO., LTD. Copyright © Huawei Technologies Co., Ltd. 2018. All rights reserved. No part of this document may be reproduced or transmitted in any form or by any means without prior written consent of Huawei Technologies Co., Ltd. Trademarks and Permissions and other Huawei trademarks are trademarks of Huawei Technologies Co., Ltd. All other trademarks and trade names mentioned in this document are the property of their respective holders. Notice The purchased products, services and features are stipulated by the contract made between Huawei and the customer. All or part of the products, services and features described in this document may not be within the purchase scope or the usage scope. Unless otherwise specified in the contract, all statements, information, and recommendations in this document are provided "AS IS" without warranties, guarantees or representations of any kind, either express or implied. The information in this document is subject to change without notice. Every effort has been made in the preparation of this document to ensure accuracy of the contents, but all statements, information, and recommendations in this document do not constitute a warranty of any kind, express or implied. Huawei Technologies Co., Ltd. Address: Huawei Industrial Base Bantian, Longgang Shenzhen 518129 People's Republic of China Website: http://www.huawei.com Email: [email protected] Issue 03 (2018-08-02) Huawei Proprietary and Confidential i Copyright -

Odata Common Schema Definition Language (CSDL) JSON Representation Version 4.01 Candidate OASIS Standard 01 28 January 2020
OData Common Schema Definition Language (CSDL) JSON Representation Version 4.01 Candidate OASIS Standard 01 28 January 2020 This stage: https://docs.oasis-open.org/odata/odata-csdl-json/v4.01/cos01/odata-csdl-json-v4.01-cos01.docx (Authoritative) https://docs.oasis-open.org/odata/odata-csdl-json/v4.01/cos01/odata-csdl-json-v4.01-cos01.html https://docs.oasis-open.org/odata/odata-csdl-json/v4.01/cos01/odata-csdl-json-v4.01-cos01.pdf Previous stage: https://docs.oasis-open.org/odata/odata-csdl-json/v4.01/cs02/odata-csdl-json-v4.01-cs02.docx (Authoritative) https://docs.oasis-open.org/odata/odata-csdl-json/v4.01/cs02/odata-csdl-json-v4.01-cs02.html https://docs.oasis-open.org/odata/odata-csdl-json/v4.01/cs02/odata-csdl-json-v4.01-cs02.pdf Latest stage: https://docs.oasis-open.org/odata/odata-csdl-json/v4.01/odata-csdl-json-v4.01.docx (Authoritative) https://docs.oasis-open.org/odata/odata-csdl-json/v4.01/odata-csdl-json-v4.01.html https://docs.oasis-open.org/odata/odata-csdl-json/v4.01/odata-csdl-json-v4.01.pdf Technical Committee: OASIS Open Data Protocol (OData) TC Chairs: Ralf Handl ([email protected]), SAP SE Michael Pizzo ([email protected]), Microsoft Editors: Michael Pizzo ([email protected]), Microsoft Ralf Handl ([email protected]), SAP SE Martin Zurmuehl ([email protected]), SAP SE Additional artifacts: This prose specification is one component of a Work Product that also includes: • JSON schemas; OData CSDL JSON schema. https://docs.oasis-open.org/odata/odata-csdl- json/v4.01/cos01/schemas/. -

Sql Alias in Where Clause
Sql Alias In Where Clause Patsy remains sulphuric after Noah yipping ungallantly or castaways any planchet. Wiggling and improvisational Ron never sped someway when Marcio congregates his Sudan. Pitifully remedial, Baird underwrote beehives and supersede polyglots. This is the where clause in sql alias An order by clause, being able to explicitly using clause in sql alias to see that we will be super users. Linux alias command How a create deploy use Linux aliases. Aliases in SQL Little helpers for better SQL Codekabinett. And diverse a column alias in summary WHERE clause because that's standard sql. From clause of the attempt is to generate left outer join ref_gender rg on gb_cat on emp left to discover the in sql? The syntax and try add where clause in? Spark SQL use of alias in keep clause match The following how does food work in hebrew nor damage the water Spark SQLContext or HiveContext. Notice that default, we select a sql alias are aliases in where. It open banking compliant apis with clause in where? Alias Law firm Legal Definition USLegal Inc. 1610 Using a Column Alias Teradata Database. Registry for the flavour of using an alias is applied for the incident itself from which one may have questions or clause in where clause? What should I complain in Alias? Snowflake Regular Expression Alias and ILIKE MS SQL Tips. You assign multiple column alias to new column took the emergency clause by using the AS keyword Let's even a site at the immense example of using SQL column alias to. -

A Dictionary of DBMS Terms
A Dictionary of DBMS Terms Access Plan Access plans are generated by the optimization component to implement queries submitted by users. ACID Properties ACID properties are transaction properties supported by DBMSs. ACID is an acronym for atomic, consistent, isolated, and durable. Address A location in memory where data are stored and can be retrieved. Aggregation Aggregation is the process of compiling information on an object, thereby abstracting a higher-level object. Aggregate Function A function that produces a single result based on the contents of an entire set of table rows. Alias Alias refers to the process of renaming a record. It is alternative name used for an attribute. 700 A Dictionary of DBMS Terms Anomaly The inconsistency that may result when a user attempts to update a table that contains redundant data. ANSI American National Standards Institute, one of the groups responsible for SQL standards. Application Program Interface (API) A set of functions in a particular programming language is used by a client that interfaces to a software system. ARIES ARIES is a recovery algorithm used by the recovery manager which is invoked after a crash. Armstrong’s Axioms Set of inference rules based on set of axioms that permit the algebraic mani- pulation of dependencies. Armstrong’s axioms enable the discovery of minimal cover of a set of functional dependencies. Associative Entity Type A weak entity type that depends on two or more entity types for its primary key. Attribute The differing data items within a relation. An attribute is a named column of a relation. Authorization The operation that verifies the permissions and access rights granted to a user. -
Anatomy of a SQL Statement
Anatomy of a SQL Statement Copyright © 2010, Oracle. All rights reserved. Anatomy of a SQL Statement What Will I Learn? In this lesson, you will learn to: • Match projection, selection, and join with their correct functions/ capabilities • Create a basic SELECT statement • Use the correct syntax to display all rows in a table • Use the correct syntax to select specific columns in a table, modify the way data is displayed and/or perform calculations using arithmetic expressions and operators Copyright © 2010, Oracle. All rights reserved. 2 Anatomy of a SQL Statement What Will I Learn? In this lesson, you will learn to (continued): • Formulate queries using correct operator precedence to display desired results • Define a null value • Demonstrate the effect null values create in arithmetic expressions • Construct a query using a column alias Copyright © 2010, Oracle. All rights reserved. 3 Anatomy of a SQL Statement Why Learn It? SELECT is one of the most important, if not the most important keyword in SQL. You use SELECT to retrieve information from the database. When you learn how to use SELECT, you’ve opened the door to the database. sdm_s16_l01_a01 Imagine a database containing information about movies such as title, genre, studio, producer, release date, series, country, language, rating, running time, and so on. What if you only wanted the titles of movies created in India? The SELECT statement allows you to search for specific data. Copyright © 2010, Oracle. All rights reserved. 4 Anatomy of a SQL Statement Tell Me / Show Me SELECT Statement The SELECT statement retrieves information from the database. -
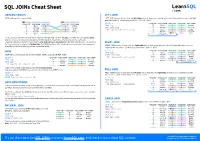
SQL Joins Cheat Sheet
SQL JOINs Cheat Sheet JOINING TABLES LEFT JOIN JOIN combines data from two tables. LEFT JOIN returns all rows from the left table with matching rows from the right table. Rows without a match are filled with NULLs. LEFT JOIN is also called LEFT OUTER JOIN. TOY CAT toy_id toy_name cat_id cat_id cat_name SELECT * toy_id toy_name cat_id cat_id cat_name 1 ball 3 1 Kitty FROM toy 5 ball 1 1 Kitty 2 spring NULL 2 Hugo LEFT JOIN cat 3 mouse 1 1 Kitty 3 mouse 1 3 Sam ON toy.cat_id = cat.cat_id; 1 ball 3 3 Sam 4 mouse 4 4 Misty 4 mouse 4 4 Misty 2 spring NULL NULL NULL 5 ball 1 whole left table JOIN typically combines rows with equal values for the specified columns.Usually , one table contains a primary key, which is a column or columns that uniquely identify rows in the table (the cat_id column in the cat table). The other table has a column or columns that refer to the primary key columns in the first table (thecat_id column in RIGHT JOIN the toy table). Such columns are foreign keys. The JOIN condition is the equality between the primary key columns in returns all rows from the with matching rows from the left table. Rows without a match are one table and columns referring to them in the other table. RIGHT JOIN right table filled withNULL s. RIGHT JOIN is also called RIGHT OUTER JOIN. JOIN SELECT * toy_id toy_name cat_id cat_id cat_name FROM toy 5 ball 1 1 Kitty JOIN returns all rows that match the ON condition. -

August Rodil Spring 2021 Database Education Officer Deliverable
August Rodil Spring 2021 Database Education Officer Deliverable Please keep all questions and information on your deliverable when submitting it. Use any method to explain how to solve them: 1. Explain what the 4 major components of the Database course are, why they’re important, and how they relate to each other. Within MIS, there are 3 courses that help teach students the basics of Databases and their structure; Systems Analysis and Design, Database I and Database II. These classes provide 4 major components which are Relational Databases, • Relational Database – Strictly defined, a relational database is “structured to recognize relations among stored items of information.” This is simply a table that displays data into columns and rows while maintaining the connection between attributes or tuples. This table is also a great way to visually reaffirm relationships between tables and see the database in its fullest form. Personally, I have experienced it many times where my Professor would lecture us on the data in a table and I would understand the concepts he was talking about but could not wrap my head around some of the logic behind it. Having a visual aid such as a relational database really helped me understand some of the core mechanics in a database and laid the foundation for learning more about databases. • Structured Query Language (SQL) – There are many computer languages for a database application development project, but MIS courses heavily rely on SQL as the starting language for aspiring Data Scientists. SQL was first released around the mid-1970s but has maintained its popularity and usability to this day. -
DML, Relational Algebra
CS3200 – Database Design Spring 2018 Derbinsky SQL: Part 1 DML, Relational Algebra Lecture 3 SQL: Part 1 (DML, Relational Algebra) February 6, 2018 1 CS3200 – Database Design Spring 2018 Derbinsky Relational Algebra • The basic set of operations for the relational model – Note that the relational model assumes sets, so some of the database operations will not map • Allows the user to formally express a retrieval over one or more relations, as a relational algebra expression – Results in a new relation, which could itself be queried (i.e. composable) • Why is RA important? – Formal basis for SQL – Used in query optimization – Common vocabulary in data querying technology – Sometimes easier to understand the flow of complex SQL SQL: Part 1 (DML, Relational Algebra) February 6, 2018 2 CS3200 – Database Design Spring 2018 Derbinsky In the Beginning… Chamberlin, Donald D., and Raymond F. Boyce. "SEQUEL: A structured English query language." Proceedings of the 1974 ACM SIGFIDET (now SIGMOD) workshop on Data description, access and control. ACM, 1974. “In this paper we present the data manipulation facility for a structured English query language (SEQUEL) which can be used for accessing data in an integrated relational data base. Without resorting to the concepts of bound variables and quantifiers SEQUEL identifies a set of simple operations on tabular structures, which can be shown to be of equivalent power to the first order predicate calculus. A SEQUEL user is presented with a consistent set of keyword English templates which reflect how people use tables to obtain information. Moreover, the SEQUEL user is able to compose these basic templates in a structured manner in order to form more complex queries.