Neuro-Dominating Set Scheme for a Fast and Efficient Robot Deployment
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Thesis Finale ENSAIT 24 Aug 2017
N° d’ordre: 42389 UNIVERSITÉ LILLE 1. SCIENCES ET TECHNOLOGIES École Doctorale Sciences Pour l'Ingénieur Université Lille Nord-de-France ECO-DESIGNED FUNCTIONALIZATION OF POLYESTER FABRIC Doctoral dissertation by Tove AGNHAGE in the partial fulfillment of Erasmus Mundus Joint Doctorate program: Sustainable Management and Design for Textiles Jointly organized by University Lille 1, France, University of Borås, Sweden, and Soochow University, China Presented the 20th of September 2017 at École Nationale Supérieure des Arts et Industries Textiles (ENSAIT) Heikki MATTILA University of Borås Examiner Guido SONNEMANN University of Bordeaux Examiner Isabelle VROMAN University of Reims Examiner Lieva VAN LANGENHOVE Ghent University Examiner Myriam VANNESTE CENTEXBEL, Ghent Examiner Jinping GUAN Soochow University Invited Nemeshwaree BEHARY ENSAIT, Roubaix Invited Anne PERWUELZ ENSAIT, Roubaix Co-director Vincent NIERSTRASZ University of Borås Co-director Guoqiang CHEN Soochow University Co-director Copyright © Tove Agnhage ENSAIT, GEMTEX 2 allée Louise et Victor Champier FR-590 56 Roubaix, France Textile Materials Technology University of Borås SE-501 90 Borås, Sweden College of Textile and Clothing Engineering Soochow University 199 Renai Road CN-215123 Suzhou, China ISBN 978-91-88-269-54-6 (pdf) ABSTRACT There is an increased awareness of the textile dyeing and finishing sector’s high impact on the environment due to high water consumption, polluted wastewater, and inefficient use of energy. To reduce environmental impacts, researchers propose the use of dyes from natural sources. The purpose of using these is to impart new attributes to textiles without compromising on environmental sustainability. The attributes given to the textile can be color and/or other characteristics. -
Intitulé Du Module
PROPOSITION of THESIS-Avignon University-FRANCE PhD CONTRACT 2018-2021 Targeted call (please check the corresponding case): ministerial PhD contract ED 536 □ ministerial PhD contract ED 537 □ PhD contract FR Agorantic ------------------------------------------------------------------------------------------------------------------------ PhD supervisor: Christophe EMBLANCH (UMR EMMAH, Université d’Avignon et de Pays de Vaucluse, France) Co-supervisors : Florent BARBECOT (GEOTOP, UQAM, Canada), Marina GILLON (UMR EMMAH, Université d’Avignon et des Pays de Vaucluse, France), Elisabeth GIBERT-BRUNET (UMR GEOPS, Université Paris Sud/Paris Saclay, France) Contact: Name : GILLON Surname : Marina Mail : [email protected] Phone: +33 490144467 French title: Compréhension des fractionnements isotopiques hors équilibre lors de la formation des carbonates et leur dépendance avec les facteurs environnementaux, en vue de reconstitutions d’évolution des conditions hydriques sur la période récente (centaines d’années) English title: Understanding of non-equilibrium isotopic fractionations during carbonate formation and their dependence on environmental factors, in order to reconstructing changes in water conditions over the recent period (hundreds of years) 13 18 Key-words: non-equilibrium isotopic fractionation, C, O, dissolved carbon, carbonates, CO2, hydrosystems Co tutorship : Yes - Country: Canada Candidate profile: The candidate must have a master’s degree (or equivalent) in Earth Sciences or a related discipline with essential hydrochemistry-isotopy knowledge. He/she must demonstrate autonomy and a real ability to work in a team as part of a multidisciplinary project. He/She will have to develop a mathematical approach. He/She will also have to go to the study sites to acquire new data and he/she will have to develop laboratory experiments. Required skills: hydrochemistry-isotopy, numeric development; appreciated skills: Field work and laboratory work. -

PAOLO MELINDI-GHIDI Academic CV – April 2019 Paris Nanterre University 200, Av
PAOLO MELINDI-GHIDI Academic CV – April 2019 Paris Nanterre University 200, Av. de la Republique 92000 Nanterre, France E-mail: paolo.melindighidi@ parisnanterre.fr Homepage: https://sites.google.com/site/pmelindighidiecon/ CURRENT POSITION Maître de Conference (Associate Professor) – Paris Nanterre University, France Research Associate, GREQAM-AMSE, Aix-Marseille Univeristy, France PAST POSITIONS 02/2017 – 08/2017 Post-doctoral researcher at BETA, University of Strasbourg, France 02/2015 – 12/2016 Post-doctoral researcher in Economics at GREQAM, University of Aix-Marseille, France 02/2012 – 01/2015 Researcher FP7 at BioGov Unit, Catholic University of Louvain, Belgium RESEARCH INTERESTS Primary Fields: Population Economics, Environmental Economics, Dynamics of Inequality Secondary Fields: Public Economics, Political Economy, Cultural Economics EDUCATION Ph.D. In Economics, European Doctoral Program, 2012 - UCLouvain IRES, Catholic University of Louvain, Belgium (visiting at PSE - Paris School of Economics - 2011) Title of the Thesis: 'The Dynamics of Inequality, Minorities and School Choice' Supervisor: David de la Croix (Professor, Catholic University of Louvain, Belgium) Members of the Jury: Matteo Cervellati, Frédéric Docquier, Thierry Verdier Master of Arts in Economics (DEA), 2007 - UCLouvain IRES, Catholic University of Louvain, Belgium Supervisor: Frédéric Docquier (Professor, Catholic University of Louvain, Belgium) Grade: Distinction Bachelor in Political Sciences, 2004 University of Bologna, Italy Supervisor: Paolo Onofri (Professor, -

IEEE VEHICULAR TECHNOLOGY SOCIETY Election of Members to the Board of Governors for a Three-Year Term 1 January 2021 – 31 December 2023
IEEE VEHICULAR TECHNOLOGY SOCIETY Election of Members to the Board of Governors For a Three-Year Term 1 January 2021 – 31 December 2023 ABDERRAHIM BENSLIMANE (M’99-SM’08) Biography: Abderrahim Benslimane is Full Professor of Computer-Science at the Avignon University/France since 2001. He has been nominated in 2020 as IEEE VTS Distinguished Lecturer. He has the French award for Doctoral supervision and Research 2017-2021. He has been recently an International Expert at the French Ministry of Foreign and European affairs (2012-2016). He served as a coordinator of the Faculty of Engineering and head of the Research Center in Informatics at the French University in Egypt. He was attributed the French award of Scientific Excellency (2011-2014). He has been as Associate Professor at the University of Technology of Belfort-Montbéliard since September 1994. He obtained the title to supervise researches (HDR 2000) from the University of Cergy- Pontoise, France. He received the PhD degree (1993), DEA (MS 1989) from the Franche-Comte University of Besançon, and BS (1987) from the University of Nancy, all in Computer Science. He has been nominated IEEE ComSoc VC of Multimedia TC 2020-2022. He is past Chair of the ComSoc Technical Committee of Communication and Information Security 2017-2019. He is EiC of Inderscience Int. J. of Multimedia Intelligence and Security (IJMIS), Area Editor of Security in IEEE IoT journal, editorial member of IEEE Transaction on Multimedia, IEEE Wireless Communication Magazine, IEEE System Journal, Elsevier Ad Hoc Networks, Springer Wireless Network Journal and Past Area Editor of Wiley Security and Privacy journal 2017-2019. -

World Scientists' Warning of a Climate Emergency
Supplemental File S1 for the article “World Scientists’ Warning of a Climate Emergency” published in BioScience by William J. Ripple, Christopher Wolf, Thomas M. Newsome, Phoebe Barnard, and William R. Moomaw. Contents: List of countries with scientist signatories (page 1); List of scientist signatories (pages 1-319). List of 153 countries with scientist signatories: Albania; Algeria; American Samoa; Andorra; Argentina; Australia; Austria; Bahamas (the); Bangladesh; Barbados; Belarus; Belgium; Belize; Benin; Bolivia (Plurinational State of); Botswana; Brazil; Brunei Darussalam; Bulgaria; Burkina Faso; Cambodia; Cameroon; Canada; Cayman Islands (the); Chad; Chile; China; Colombia; Congo (the Democratic Republic of the); Congo (the); Costa Rica; Côte d’Ivoire; Croatia; Cuba; Curaçao; Cyprus; Czech Republic (the); Denmark; Dominican Republic (the); Ecuador; Egypt; El Salvador; Estonia; Ethiopia; Faroe Islands (the); Fiji; Finland; France; French Guiana; French Polynesia; Georgia; Germany; Ghana; Greece; Guam; Guatemala; Guyana; Honduras; Hong Kong; Hungary; Iceland; India; Indonesia; Iran (Islamic Republic of); Iraq; Ireland; Israel; Italy; Jamaica; Japan; Jersey; Kazakhstan; Kenya; Kiribati; Korea (the Republic of); Lao People’s Democratic Republic (the); Latvia; Lebanon; Lesotho; Liberia; Liechtenstein; Lithuania; Luxembourg; Macedonia, Republic of (the former Yugoslavia); Madagascar; Malawi; Malaysia; Mali; Malta; Martinique; Mauritius; Mexico; Micronesia (Federated States of); Moldova (the Republic of); Morocco; Mozambique; Namibia; Nepal; -

Modeling Potential Distributions of Three European Amphibian Species
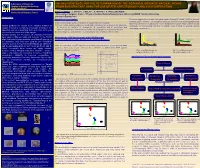
Herpetological Conservation and Biology 13(1):91–104. Submitted: 20 January 2018; Accepted: 16 February 2018; Published 30 April 2018. MODELING POTENTIAL DISTRIBUTIONS OF THREE EUROPEAN AMPHIBIAN SPECIES COMPARING ENFA AND MAXENT CLÉMENTINE PRÉAU1,2,3,8, AUDREY TROCHET4,5, ROMAIN BERTRAND6, AND FRANCIS ISSELIN-NONDEDEU3,7 1Réserve Naturelle Nationale du Pinail, GEREPI, Moulin de Chitré, 86210 Vouneuil-sur-Vienne, France 2Université de Poitiers, UMR CNRS 7267 (Laboratoire Ecologie et Biologie des Interactions), 40 avenue du Recteur Pineau, 86022 Poitiers Cedex, France 3Ecole Polytechnique de l'Université François Rabelais, UMR 7324 CNRS CITERES (Département d'Aménagement et d'Environnement), 33-35 allée Ferdinand de Lesseps, 37200 Tours, France 4CNRS, ENFA, Université Paul Sabatier, UMR 5174 EDB (Laboratoire Evolution et Diversité Biologique), 118 route de Narbonne, 31062 Toulouse, France 5CNRS, Université Paul Sabatier, UMR 5321 SETE (Station d'Ecologie Théorique et Expérimentale), 2 route du CNRS, 09200 Moulis, France 6CNRS, Université Paul Sabatier, CTMB (Centre de théorisation et de modélisation de la biodiversité), UMR 5321 SETE (Station d'Ecologie Théorique et Expérimentale), 2 route du CNRS, 09200 Moulis, France 7UMR CNRS/IRD 7263 IMBE Université d'Avignon et des Pays de Vaucluse, 84029 Avignon Cedex 09, France 8Corresponding author, e-mail: [email protected] Abstract.—Understanding the distribution and habitat preferences of amphibians is crucial to protecting their declining populations. It remains a challenge because most species are difficult to detect, enough data on their occurrence are needed, and the contribution of climatic and habitat factors is not well known. Various modeling approaches exist both to infer habitat preferences based on known locations, and to extrapolate species geographic distributions. -

Diapositive 1
E- RENEWABLE ENERGY -Vulnerability of systems and circuits - Biomass Geothermal, Hydraulic - Digital EMC modeling - Energy storage & management - Microwave device modeling - Fuel cell, biogas - Power amplifier devices and circuits - Heat Transfer & Thermal Energy - Low noise components and receivers - Materials, semiconductors - Optical Communications - Photovoltaic energy & Solar Energy - Optoelectronic devices and All-optical networks - Wind Energy , Solar Energy & Energy and Smart-System - Remote Sensing System - RF devices for WIrless health care applications B- ELECTRONIC & MULTIMEDIA Registration Fees -Digital, analog, RF, mixed, asynchronous circuit design Before - Transducer design After March National School of Applied Sciences – - Low-voltage, low-power, performance-driven, reliability-driven,..... Country Participant March 31th, 31th, 2017 - Power and spectral efficiency 2017 Fez, Faculty of Sciences & Techniques- - Digital Image/Video Processing , Multimedia Systems, Image Fez - Video Processing & Patterns recognition Morocco Students 160 EURO 200 EURO - Mobile devices & - Multimedia broadcasting overall system and standardization Renewable Energies & Smart Systems - Multimedia signal compression and coding for broadcasting Morocco Academics 250 EURO 300 EURO - Multimedia streaming and control Laboratory - IPTV with broadcasting Other Students 250 EURO 300 EURO C- EMBEDDED & INTELLIGENT SYSTEMS countries Organize - Custom, semi-custom, ASIC, programmable circuit design Other - Processor, co-processor, multi-processor, memory -
An Easy Protocol for the Determination of the Botanical Origin of Natural Resins
Laboratory of Chemistry AN EASY PROTOCOL FOR THE DETERMINATION OF THE BOTANICAL ORIGIN OF NATURAL RESINS Applied to Art and Archeology FROM BURSERA THAT JOINS THE USE OF FTIR SPECTROSCOPY AND X-RAY DIFFRACTION CNRS 7263-IRD 237 1 2 3 1 1 University of Avignon, France Paola LUCERO , L. BUCIO , I. BELIO , C. MATHE , C. VIEILLESCAZES 1 University of Avignon, France 2 Physics Institute National Autonomous University UNAM 3 Sinaloa University [email protected] Introduction Materials of Investigation Previous studies have shown that when copal is heated (Frondel, 1967) or ground (Amaro, 2007) it loses its crystalline structure, therefore our team hypothesized In this research two types of samples of copal resin were studied: that X-ray diffraction could provide some insights into sample history which would A) Fresh resins represented by certified origin samples from 6 species: B. bipinnata, Natural products are known to be complex mixtures of contribute to determining whether a sample was heated or ground during B. excelsa, B. laxiflora, B. stenophylla, B. grandifloia and B. penicillata and organic molecules. Certain spectroscopic techniques are anthropogenic activities. advantageous when identifying these materials, as they do commercial samples from markets in different geographical locations in Mexico. not require the destruction of the sample. B) Archeological resins from the “Templo Mayor” site and from Chichén Itzá. 56000 30000 B. stenophylla 54000 Bursera species are the source of oleoresins that have 52000 25000 50000 48000 B. penicillata 46000 been used in different fields and cultures. In the Pacific Methodology: FTIR Spectroscopy plus PCA (Principal 20000 44000 e 42000 l e t l i t i T 40000 15000 T s i s 38000 Sample from Chichén Itzá i x slope this botanic genre numbers more than 80 species. -
Modeling Potential Distributions of Three European Amphibian Species Comparing Enfa and Maxent Préau Et Al.-Maxent and ENFA Modeling on Three Amphibian Species
See discussions, stats, and author profiles for this publication at: https://www.researchgate.net/publication/325036491 Modeling potential distributions of three european amphibian species comparing enfa and Maxent Préau et al.-MaxEnt and ENFA modeling on three amphibian species Article in Herpetological Conservation and Biology · May 2018 CITATION READS 1 457 4 authors: Clémentine Préau Audrey Trochet Université de Poitiers Station d’Ecologie Expérimentale à Moulis 9 PUBLICATIONS 10 CITATIONS 35 PUBLICATIONS 518 CITATIONS SEE PROFILE SEE PROFILE Romain Bertrand Francis Isselin-Nondedeu University of Tours 60 PUBLICATIONS 583 CITATIONS 41 PUBLICATIONS 271 CITATIONS SEE PROFILE SEE PROFILE Some of the authors of this publication are also working on these related projects: Altitudinal colonization and adaptability to hypoxia : an ignored straint of global warming on biodiversity View project Effect of climate change on the Pyrenean newts View project All content following this page was uploaded by Clémentine Préau on 09 May 2018. The user has requested enhancement of the downloaded file. Herpetological Conservation and Biology 13(1):91–104. Submitted: 20 January 2018; Accepted: 16 February 2018; Published 30 April 2018. MODELING POTENTIAL DISTRIBUTIONS OF THREE EUROPEAN AMPHIBIAN SPECIES COMPARING ENFA AND MAXENT CLÉMENTINE PRÉAU1,2,3,8, AUDREY TROCHET4,5, ROMAIN BERTRAND6, AND FRANCIS ISSELIN-NONDEDEU3,7 1Réserve Naturelle Nationale du Pinail, GEREPI, Moulin de Chitré, 86210 Vouneuil-sur-Vienne, France 2Université de Poitiers, UMR CNRS -

Avignon, Your New Home
DISCOVER YOUR CITY Campus France will guide you through your first steps in France and exploring Avignon, your new home. WELCOME TO AVIGNON - JULY 2021. - JULY Photos: DR - Cover photo: ©saiko3p, AdobeStock Photos: DR - Cover - Rubrik (91) C Production: - all students can contact the Echanges student YOUR ARRIVAL IN association which is part of the ESN network AVIGNON / (Erasmus Student Network): https://www.esn.org/ and via Facebook: https://www.facebook.com/gloupix.esnavignon Student Welcome services at the Université Welcome and orientation in other institutions d’Avignon If you are enrolled in another institution, please Université d’Avignon has set up various forms of consult the Campus France website for orientation. support to provide the best possible welcome for The site presents a series of Information Sheets students: covering the different higher learning institutions: - a Welcome Desk at the CROUS (help finding https://www.campusfrance.org > Students > accommodation, applications for residence Documentary resources > Practical information permits, useful information), organized in for students and researchers > Reception conjunction with the University and the Conseil arrangements in institutions régional de Provence Alpes Côte d’Azur (PACA); - language classes and methodology training; If you cannot find your school in this list, then go - student welcome and orientation program directly to their website. in September and in January-February, before National Services classes start. Address: Maison de l’International, Hannah Arendt - students: www.etudiant.gouv.fr Campus, Service des Relations Internationales, - doctoral students, researchers: 74 rue Louis Pasteur, 84000 Avignon. http://www.euraxess.fr/fr Hours: Monday to Friday, from 9am to 12pm and 2pm to 4pm. -

Eco-Designed Functionalization of Polyester Fabric
ECO-DESIGNED FUNCTIONALIZATION OF POLYESTER FABRIC Doctoral dissertation by Tove AGNHAGE in the partial fulfillment of Erasmus Mundus Joint Doctorate program: Sustainable Management and Design for Textiles Jointly organized by University Lille 1, France, University of Borås, Sweden, and Soochow University, China Copyright © Tove Agnhage ENSAIT, GEMTEX 2 allée Louise et Victor Champier FR-590 56 Roubaix, France Textile Materials Technology University of Borås SE-501 90 Borås, Sweden College of Textile and Clothing Engineering Soochow University 199 Renai Road CN-215123 Suzhou, China ISBN 978-91-88-269-54-6 (pdf) ABSTRACT There is an increased awareness of the textile dyeing and finishing sector’s high impact on the environment due to high water consumption, polluted wastewater, and inefficient use of energy. To reduce environmental impacts, researchers propose the use of dyes from natural sources. The purpose of using these is to impart new attributes to textiles without compromising on environmental sustainability. The attributes given to the textile can be color and/or other characteristics. A drawback however, is that the use of bio-sourced dyes is not free from environmental concerns. Thus, it becomes paramount to assess the environmental impacts from using them and improve the environmental profile, but studies on this topic are generally absent. The research presented in this thesis has included environmental impact assessment, using the life cycle assessment (LCA) tool, in the design process of a multifunctional polyester (PET) fabric using natural anthraquinones. By doing so an eco-design approach has been applied, with the intention to pave the way towards eco-sustainable bio-functionalization of textiles. -

Nicotine Replacement Therapy During Pregnancy and Child Health
Nicotine Replacement Therapy during Pregnancy and Child Health Outcomes: A Systematic Review Julie Blanc, Barthélémy Tosello, Mikael Ekblad, Ivan Berlin, Antoine Netter To cite this version: Julie Blanc, Barthélémy Tosello, Mikael Ekblad, Ivan Berlin, Antoine Netter. Nicotine Replacement Therapy during Pregnancy and Child Health Outcomes: A Systematic Review. International Journal of Environmental Research and Public Health, MDPI, 2021, 18 (8), pp.4004. 10.3390/ijerph18084004. hal-03215523 HAL Id: hal-03215523 https://hal.sorbonne-universite.fr/hal-03215523 Submitted on 3 May 2021 HAL is a multi-disciplinary open access L’archive ouverte pluridisciplinaire HAL, est archive for the deposit and dissemination of sci- destinée au dépôt et à la diffusion de documents entific research documents, whether they are pub- scientifiques de niveau recherche, publiés ou non, lished or not. The documents may come from émanant des établissements d’enseignement et de teaching and research institutions in France or recherche français ou étrangers, des laboratoires abroad, or from public or private research centers. publics ou privés. International Journal of Environmental Research and Public Health Review Nicotine Replacement Therapy during Pregnancy and Child Health Outcomes: A Systematic Review Julie Blanc 1,2,* , Barthélémy Tosello 3,4, Mikael O. Ekblad 5 , Ivan Berlin 6,7 and Antoine Netter 1,8 1 Department of Obstetrics and Gynecology, North Hospital, APHM, Chemin des Bourrely, 13015 Marseille, France; [email protected] 2 EA3279, CEReSS, Health