Toolkit Support for Integrating Physical and Digital Interactions
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

SMRT® Tools Reference Guide (V8.0)
SMRT® Tools Reference Guide Introduction This document describes the command-line tools included with SMRT Link v8.0. These tools are for use by bioinformaticians working with secondary analysis results. • The command-line tools are located in the $SMRT_ROOT/smrtlink/ smrtcmds/bin subdirectory. Installation The command-line tools are installed as an integral component of the SMRT Link software. For installation details, see SMRT Link Software Installation (v8.0). • To install only the command-line tools, use the --smrttools-only option with the installation command, whether for a new installation or an upgrade. Examples: smrtlink-*.run --rootdir smrtlink --smrttools-only smrtlink-*.run --rootdir smrtlink --smrttools-only --upgrade Pacific Biosciences Command-Line Tools Following is information on the Pacific Biosciences-supplied command-line tools included in the installation. Third-party tools installed are described at the end of the document. Tool Description bam2fasta/ Converts PacBio® BAM files into gzipped FASTA and FASTQ files. bam2fastq See “bam2fasta/bam2fastq” on page 2. bamsieve Generates a subset of a BAM or PacBio Data Set file based on either a whitelist of hole numbers, or a percentage of reads to be randomly selected. See “bamsieve” on page 3. blasr Aligns long reads against a reference sequence. See “blasr” on page 5. ccs Calculates consensus sequences from multiple “passes” around a circularized single DNA molecule (SMRTbell® template). See “ccs” on page 10. dataset Creates, opens, manipulates and writes Data Set XML files. See “dataset” on page 15. Demultiplex Identifies barcode sequences in PacBio single-molecule sequencing data. See Barcodes “Demultiplex Barcodes” on page 21. gcpp Variant-calling tool which provides several variant-calling algorithms for PacBio sequencing data. -
Renderx XEP User Guide XEP User Guide
RenderX XEP User Guide XEP User Guide © Copyright 2005-2019 RenderX, Inc. All rights reserved. This documentation contains proprietary information belonging to RenderX, and is provided under a license agreement containing restrictions on use and disclosure. It is also protected by international copyright law. Because of continued product development, the information contained in this document may change without notice.The information and intellectual property contained herein are confidential and remain the exclusive intellectual property of RenderX. If you find any problems in the documentation, please report them to us in writing. RenderX does not warrant that this document is error- free. No part of this publication may be reproduced, stored in a retrieval system, or transmitted in any form or by any means - electronic, mechanical, photocopying, recording or otherwise - without the prior written permission of RenderX. RenderX Telephone: 1 (650) 328-8000 Fax: 1 (650) 328-8008 Website: http://renderx.com Email: [email protected] Table of Contents 1. Preface ................................................................................................................... 9 1.1. What©s in this Document? .............................................................................. 9 1.2. Prerequisites ................................................................................................ 9 1.3. Acronyms ................................................................................................... 10 1.4. Technical Support -

Dropping Hints: Estimating the Diets of Livestock in Rangelands Using DNA Metabarcoding of Faeces
Metabarcoding and Metagenomics 2: 1–17 DOI 10.3897/mbmg.2.22467 Research Article Dropping Hints: Estimating the diets of livestock in rangelands using DNA metabarcoding of faeces Timothy R. C. Lee1, Yohannes Alemseged2, Andrew Mitchell1 1 Australian Museum, Sydney, Australia. 2 NSW Department of Primary Industries, Trangie, Australia. Corresponding author: Timothy R. C. Lee ([email protected]) Academic editor: Emre Keskin | Received 23 November 2017 | Accepted 17 February 2018 | Published 14 March 2018 Abstract The introduction of domesticated animals into new environments can lead to considerable ecological disruption, and it can be difficult to predict their impact on the new ecosystem. In this study, we use faecal metabarcoding to characterize the diets of three ruminant taxa in the rangelands of south-western New South Wales, Australia. Our study organisms included goats (Capra aega- grus hircus) and two breeds of sheep (Ovis aries): Merinos, which have been present in Australia for over two hundred years, and Dorpers, which were introduced in the 1990s. We used High-Throughput Sequencing methods to sequence the rbcL and ITS2 genes of plants in the faecal samples, and identified the samples using the GenBank and BOLD online databases, as well as a reference collection of sequences from plants collected in the study area. We found that the diets of all three taxa were dominated by the family Malvaceae, and that the Dorper diet was more diverse than the Merino diet at both the family and the species level. We conclude that Dorpers, like Merinos, are potentially a threat to some vulnerable species in the rangelands of New South Wales. -

Building-Up of a DNA Barcode Library for True Bugs (Insecta: Hemiptera: Heteroptera) of Germany Reveals Taxonomic Uncertainties and Surprises
Building-Up of a DNA Barcode Library for True Bugs (Insecta: Hemiptera: Heteroptera) of Germany Reveals Taxonomic Uncertainties and Surprises Michael J. Raupach1*, Lars Hendrich2*, Stefan M. Ku¨ chler3, Fabian Deister1,Je´rome Morinie`re4, Martin M. Gossner5 1 Molecular Taxonomy of Marine Organisms, German Center of Marine Biodiversity (DZMB), Senckenberg am Meer, Wilhelmshaven, Germany, 2 Sektion Insecta varia, Bavarian State Collection of Zoology (SNSB – ZSM), Mu¨nchen, Germany, 3 Department of Animal Ecology II, University of Bayreuth, Bayreuth, Germany, 4 Taxonomic coordinator – Barcoding Fauna Bavarica, Bavarian State Collection of Zoology (SNSB – ZSM), Mu¨nchen, Germany, 5 Terrestrial Ecology Research Group, Department of Ecology and Ecosystem Management, Technische Universita¨tMu¨nchen, Freising-Weihenstephan, Germany Abstract During the last few years, DNA barcoding has become an efficient method for the identification of species. In the case of insects, most published DNA barcoding studies focus on species of the Ephemeroptera, Trichoptera, Hymenoptera and especially Lepidoptera. In this study we test the efficiency of DNA barcoding for true bugs (Hemiptera: Heteroptera), an ecological and economical highly important as well as morphologically diverse insect taxon. As part of our study we analyzed DNA barcodes for 1742 specimens of 457 species, comprising 39 families of the Heteroptera. We found low nucleotide distances with a minimum pairwise K2P distance ,2.2% within 21 species pairs (39 species). For ten of these species pairs (18 species), minimum pairwise distances were zero. In contrast to this, deep intraspecific sequence divergences with maximum pairwise distances .2.2% were detected for 16 traditionally recognized and valid species. With a successful identification rate of 91.5% (418 species) our study emphasizes the use of DNA barcodes for the identification of true bugs and represents an important step in building-up a comprehensive barcode library for true bugs in Germany and Central Europe as well. -
Customer Case Study Series #5/2012
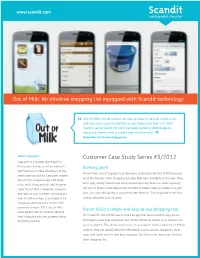
www.scandit.com Out of Milk: An intuitive shopping list equipped with Scandit technology Out of Milk’s initial feature set was to make it easy to create a list and also give users the ability to scan items into their list. With Scandit we’ve found the right barcode scanning technology to equip our clients with a simple and intuitive tool. Marvin Paul, Co-Founder, Capigami Inc. About Capigami Customer Case Study Series #5/2012 Capigami is a startup that began in Pensacola, Florida, recently moving to Starting point San Francisco to take advantage of the Marvin Paul, one of Capigami’s co-founders, originally built Out of Milk because area’s start-up culture. Capigami created he didn’t like any of the shopping list apps that were available at the time. They Out of Milk, a popular app that helps were ugly, clunky, hard-to-use and required too many steps to create a grocery users build shopping lists and organize tasks. Out of Milk is beautiful, intuitive list. Out of Milk’s initial feature set intended to make it easy to create a list and and easy-to-use. It’s been downloaded also give users the ability to scan items into their list. The simplicity of the first over 3 million times, is available in 15 version attracted a lot of users. languages and has users in over 190 countries. In April 2012, Out of Milk Vision: Build a simple and easy-to-use shopping tool users added over 6.2 million items to their shopping lists and scanned about The vision for Out of Milk was to build an app that was beautiful, easy-to-use 500,000 products. -

Automation Basics for the Small Public Library.Pdf
Automation Basics for the Small Public Library Why automate? Automation makes a library’s collection available online not only to local patrons but to library patrons statewide. Resource sharing is important to small libraries with limited budgets. Small libraries need to automate to bring them up to today’s standards so that they can be viable in their communities and in the larger library world. We will review the following during this course First steps Weeding Learning vocabulary and acronyms Planning Retrospective Conversion/Data Conversion Selecting an Automation Software (ILS/LMS) Weeding Weeding your collection is one of the first and most important steps in the automation process. You don’t want to spend money and time creating computer records for books that haven’t circulated in years, are old and out-dated, and have no value to your library. An excellent weeding process, CREW, has been developed by the Texas State Library and Archives Commission. CREW Download the PDF of CREW: A Weeding Manual for Modern Libraries Weeding The Crew (Continuous Review, Evaluation, and Weeding) Guidelines, developed by the Texas State Library and Archives Commission is a system that has worked for libraries nationwide for over 30 years. It is a library’s responsibility to maintain a collection that is free from outdated, obsolete, shabby, or no longer useful items. You can read through the CREW Manual and use it as a guideline to develop your own policy for weeding your collection for your automation project and weeding after automation. Weeding using CREW The system uses a numbering system that consists of: Copyright date (the age of material in the book.) The last time the book was used or checked out Negative factors, called MUSTIE factors are also used to evaluate whether an item should be weeded. -

Lineage Recording Reveals Dynamics of Cerebral Organoid Regionalization
bioRxiv preprint doi: https://doi.org/10.1101/2020.06.19.162032; this version posted June 26, 2020. The copyright holder for this preprint (which was not certified by peer review) is the author/funder, who has granted bioRxiv a license to display the preprint in perpetuity. It is made available under aCC-BY-NC 4.0 International license. Lineage recording reveals dynamics of cerebral organoid regionalization Zhisong He1,*, Tobias Gerber2,*, Ashley Maynard1,*, Akanksha Jain1,*, Rebecca Petri1,*, Malgorzata Santel1, Kevin Ly1, Leila Sidow2, Fátima Sanchís-Calleja1, Stephan Riesenberg2, J. Gray Camp3,4, , and Barbara Treutlein1,2, 1Department of Biosystems Science and Engineering, ETH Zürich, Basel, Switzerland 2Max-Planck-Institute for Evolutionary Anthropology, Leipzig, Germany 3Institute of Molecular and Clinical Ophthalmology Basel, Switzerland 4Department of Ophthalmology, University of Basel, Switzerland *Contributed equally Diverse regions develop within cerebral organoids generated power of scRNAseq to understand brain region composi- from human induced pluripotent stem cells (iPSCs), however it tion and progenitor-to-neuron differentiation trajectories has been a challenge to understand the lineage dynamics associ- in individual cerebral organoids. However, it has been ated with brain regionalization. Here we establish an inducible difficult to understand how brain regions are established lineage recording system that couples reporter barcodes, in- during organoid self-organization. Several lineage-coupled ducible CRISPR/Cas9 scarring, and single-cell transcriptomics single-cell transcriptomics strategies have been employed to analyze lineage relationships during cerebral organoid devel- to investigate clonal expansion and differentiation in mouse opment. We infer fate-mapped whole organoid phylogenies over a scarring time course, and reconstruct progenitor-neuron lin- and zebrafish embryos as well as complex multicellular 8−12 eage trees within microdissected cerebral organoid regions. -

Software Reuse Library Amandeep Kaur1, Raman Goyal2 1,2Lala Lajpat Rai College of Engineering & Technology, India, Moga [email protected]
International Journal of Engineering Research & Technology (IJERT) ISSN: 2278-0181 Vol. 1 Issue 5, July - 2012 Software Reuse Library Amandeep Kaur1, Raman Goyal2 1,2Lala Lajpat Rai College of Engineering & Technology, India, Moga [email protected] Abstract level or may be at Software Code level. Various approaches has been introduced to create a reused Software Reuse is an approach to reuse the pre builds system such as framework integration, Aspect oriented artifacts and assets of existing software to create new Structure, Generator Reuse, Object Oriented software rather than creating it from the scratch; this Programming, Cots Integration etc. This paper presents approach was used to embed some new and advanced a simple approach on Software Reuse to create features over existing one to create new one. In software artefacts, store and retrieve software Software Reuse Taxonomy an abstract design view components effectively. A software reuse library for model was planned, analyzed and categorized before android operating system at application level, written in creating a software so that in future any changes Java, is developed in order to support reuse concepts. persist or need to embed any extra feature , then that should introduced easily & with less complexity by 2. Software Reuse Approaches using the pre-build assets; i.e. Software System is Software Reuse approach is a way to create software developed such that it can reused again. Certain reuse components or artefacts to recur it. Many approaches such as Design Patterns, Aspect Oriented approaches has been taken into mind while creating Integration, Generator Reuse, Object Oriented software reuse system such as Generator Reuse, Aspect Programming Structure, and Software Reuse Libraries oriented approach, Cots Integration, Framework are, Framework Integration etc. -

IEEE Paper Template in A4
Application of SWOT, Principal Component and Cross-case analysis for Implementing and Recommending an ICT Technology in Library - A Case study V. Kadam Department IT, Dr. BATU,Lonere,Tal-Mangaon,Dist.-Raigad,(M.S.)India. [email protected] Abstract: Many educational organizations and universities are using computer based management information system for increasing efficiency of work in the organizations. Library management plays a vital role in academic organizations. Bar code is one of the computer based technology which helps to increase efficiency and speed of the organization effectively and qualitatively. Though each bar code character is represented by a group of bars and spaces, computer based software can easily understand it. Organizations have to implement new technologies to meet goal of the organization. Implementation of bar code technology in the Library of Dr. BATU, is a tool to minimize the time taken at the circulation counter in charging / discharging the reading material. The new technologies may be a bit difficult to be adopted in the initial stages, but in the long run they improve the image of the organization. The paper is a case study based on the bar coding at Dr. BATU. This paper renders on implementation of Bar code technology and the advantages gained from using bar code technology by looking into each work process in the case library. For better understanding of the bar code based library management system, this case study has been conducted. We used a SWOT analysis for getting actual picture of the situation raised after implementation of the bar code system in the library. -

2D Barcode Based Mobile Payment System with Biometric Security
2D Barcode Based Mobile Payment System With Biometric Security Pragyan A Masalkar (Be Comp)1, Udayraj Singh (Be Comp)2, Sayali Shinde (Be Comp)3 1,2,3 G H Raisoni Institute of Engineering & Technology. Abstract— Currently Indian market doesn’t use 2-D based Barcode Mobile. In market or malls 1d barcode system is used and queue line system is used thus it is time consuming. In market most of mobiles don’t have barcode detection system in them; only phones like iPhone have it. Money transaction system in market is also slow and credit cards and other money payment system are used. Mobile payment is very important and critical solution for mobile commerce. A user-friendly mobile payment solution is strongly needed to support mobile users to conduct secure and reliable payment transactions using mobile devices. We will present an innovative mobile payment system based on 2-Dimentional (2D) barcodes for mobile users to improve mobile user experience in mobile payment. Comparatively our system is time saving. A user-friendly mobile payment solution is strongly needed to support mobile users to conduct secure and reliable transactions using mobile devices. Keywords— Mobile Payment, POS, Payment System-Commerce, 2D-barcode I. INTRODUCTION Currently Indian market doesn’t use 2-D based Barcode Mobile. In market or malls 1d barcode system is used and queue line system is used thus it is time consuming. In market most of mobiles don’t have barcode detection system in them; only phones like iPhone have it. Money transaction system in market is also slow and credit cards and other money payment system are used. -

Luatex Lunatic
E34 MAPS 39 Luigi Scarso LuaTEX lunatic And Now for Something Completely Different Examples are now hosted at contextgarden [35] while – Monty Python, 1972 [20] remains for historical purposes. Abstract luatex lunatic is an extension of the Lua language of luatex to permit embedding of a Python interpreter. Motivations & goals A Python interpreter hosted in luatex allows macro pro- TEX is synonymous with portability (it’s easy to im- grammers to use all modules from the Python standard li- plement/adapt TEX the program) and stability (TEX the brary, allows importing of third modules, and permits the language changes only to Vx errors). use of existing bindings of shared libraries or the creation of We can summarize by saying that “typesetting in T X new bindings to shared libraries with the Python standard E module ctypes. tends to be everywhere everytime.” Some examples of such bindings, particularly in the area of These characteristics are a bit unusual in today’s scientific graphics, are presented and discussed. scenario of software development: no one is surprised Intentionally the embedding of interpreter is limited to the if programs exist only for one single OS (and even for python-2.6 release and to a luatex release for the Linux op- a discontinued OS, given the virtualization technology) erating system (32 bit). and especially no one is surprised at a new release of a program, which actually means bugs Vxed and new Keywords features implemented (note that the converse is in some Lua, Python, dynamic loading, ffi. sense negative: no release means program discontinued). -

Expressed Barcodes Enable Clonal Characterization of Chemotherapeutic Responses in Chronic Lymphocytic Leukemia
bioRxiv preprint doi: https://doi.org/10.1101/761981; this version posted September 8, 2019. The copyright holder for this preprint (which was not certified by peer review) is the author/funder, who has granted bioRxiv a license to display the preprint in perpetuity. It is made available under aCC-BY-NC-ND 4.0 International license. Expressed barcodes enable clonal characterization of chemotherapeutic responses in chronic lymphocytic leukemia Aziz Al’Khafaji1,2*, Catherine Gutierrez3,4*, Eric Brenner1,2, Russell Durrett1,2, Kaitlyn E. Johnson2, Wandi Zhang4, Shuqiang Li4,5,6, Kenneth J. Livak4,6, Donna Neuberg7, Amy Brock1,2, Catherine J. Wu3,4,5,8 1 Institute of Cellular and Molecular Biology, University of Texas at Austin, TX, USA 2 Biomedical Engineering, University of Texas at Austin, TX, USA 3 Harvard Medical School, Boston, MA, USA 4 Department of Medical Oncology, Dana-Farber Cancer Institute, Boston, MA, USA 5 Broad Institute of MIT and Harvard, Cambridge, MA, USA 6 Translational Immunogenomics Lab, Dana-Farber Cancer Institute, Boston, MA, USA 7 Department of Data Sciences, Dana Farber Cancer Institute, Boston, MA, USA 8 Department of Medicine, Brigham and Women’s Hospital, Boston, MA, USA *Both authors contributed equally to this work. Author information: These authors jointly supervised this work: Catherine J. Wu and Amy Brock Correspondence should be addressed to [email protected] and [email protected] Key words: Chronic lymphocytic leukemia, CLL, clonal evolution, clonal dynamics, drug resistance, lineage tracing, DNA barcoding, expressed barcodes, single-cell RNA sequencing, cancer transcriptomics 1 bioRxiv preprint doi: https://doi.org/10.1101/761981; this version posted September 8, 2019.