An Abstract of the Thesis Of
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-
Applications of Multiphase Heat Transfer.Pdf
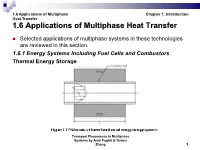
1.6 Applications of Multiphase Chapter 1: Introduction Heat Transfer 1.6 Applications of Multiphase Heat Transfer Selected applications of multiphase systems in these technologies are reviewed in this section. 1.6.1 Energy Systems Including Fuel Cells and Combustors Thermal Energy Storage Figure 1.17 Schematic of latent heat thermal energy storage system. Transport Phenomena in Multiphase Systems by Amir Faghri & Yuwen Zhang 1 1.6 Applications of Multiphase Chapter 1: Introduction Heat Transfer The major barrier to more widespread use of solar energy is its periodic feature, i.e., it is available only during daytime, and so a heat storage device is needed to store energy and release it for use at night. The latent heat thermal energy storage system, which utilizes phase-change materials (PCMs) to absorb and release heat, is widely used for this purpose. The PCM in the thermal energy storage system is molten when the system absorbs heat, and it solidifies when the system releases heat. The advantages of the latent heat thermal energy storage system are that: a large amount of heat can be absorbed and released at a constant temperature the size of the latent heat thermal energy system is considerably smaller than its counterpart using sensible heat thermal energy storage. Transport Phenomena in Multiphase Systems by Amir Faghri & Yuwen Zhang 2 1.6 Applications of Multiphase Chapter 1: Introduction Heat Transfer Power and Refrigeration Cycles The condenser is a major component in power plants as well as in air conditioning units and refrigerators. The condenser converts exhaust steam/refrigerant vapor into liquid and by rejecting heat to the ambient environment. -

Surface Engineering for Phase Change Heat Transfer: a Review
A manuscript accepted in MRS Energy and Sustainability, a Review Journal, September 2014 Copyright Materials Research Society Surface Engineering for Phase Change Heat Transfer: A Review Daniel Attinger,1,* Christophe Frankiewicz,1 Amy R. Betz,2 Thomas M. Schutzius,3 Ranjan Ganguly,3,4 Arindam Das,3 C.-J. Kim,5 Constantine M. Megaridis3,* 1 Department of Mechanical Engineering, Iowa State University, Ames IA 50011, USA 2 Department of Mechanical and Nuclear Engineering, Kansas State University, Manhattan, KS 66506, USA 3 Department of Mechanical Engineering, University of Illinois at Chicago, Chicago IL 60607-7022, USA 4 Department of Power Engineering, Jadavpur University, Kolkata 700098, India 5 Department of Mechanical and Aerospace Engineering University of California, Los Angeles, Los Angeles, CA 90095-1597, USA Abstract Among numerous challenges to meet the rising global energy demand in a sustainable manner, improving phase change heat transfer has been at the forefront of engineering research for decades. The high heat transfer rates associated with phase change heat transfer are essential to energy and industry applications; but phase change is also inherently associated with poor thermodynamic efficiencies at low heat flux, and violent instabilities at high heat flux. Engineers have tried since the 1930’s to fabricate solid surfaces that improve phase change heat transfer. The development of micro and nanotechnologies has made feasible the high-resolution control of surface texture and chemistry over length scales ranging from molecular levels to centimeters. This paper reviews the fabrication techniques available for metallic and silicon- based surfaces, considering sintered and polymeric coatings. The influence of such surfaces in multiphase processes of high practical interest, e.g. -

Surface Engineering for Phase Change Heat Transfer: a Review Daniel Attinger Iowa State University, [email protected]
Mechanical Engineering Publications Mechanical Engineering 11-20-2014 Surface engineering for phase change heat transfer: A review Daniel Attinger Iowa State University, [email protected] Amy R. Betz Kansas State University Thomas M. Schutzuis University of Illinois at Chicago Ranjan Ganguly University of Illinois at Chicago Arindam Das University of Illinois at Chicago See next page for additional authors Follow this and additional works at: http://lib.dr.iastate.edu/me_pubs Part of the Heat Transfer, Combustion Commons The ompc lete bibliographic information for this item can be found at http://lib.dr.iastate.edu/ me_pubs/137. For information on how to cite this item, please visit http://lib.dr.iastate.edu/ howtocite.html. This Article is brought to you for free and open access by the Mechanical Engineering at Iowa State University Digital Repository. It has been accepted for inclusion in Mechanical Engineering Publications by an authorized administrator of Iowa State University Digital Repository. For more information, please contact [email protected]. Surface engineering for phase change heat transfer: A review Abstract Owing to advances in micro- and nanofabrication methods over the last two decades, the degree of sophistication with which solid surfaces can be engineered today has caused a resurgence of interest in the topic of engineering surfaces for phase change heat transfer. This review aims at bridging the gap between the material sciences and heat transfer communities. It makes the argument that optimum surfaces need to address the specificities of phase change heat transfer in the way that a key matches its lock. This calls for the design and fabrication of adaptive surfaces with multiscale textures and non-uniform wettability. -
Characterization of Evaporation/Condensation During Pool Boiling and Flow Boiling Mostafa Mobli University of South Carolina
University of South Carolina Scholar Commons Theses and Dissertations 2018 Characterization Of Evaporation/Condensation During Pool Boiling And Flow Boiling Mostafa Mobli University of South Carolina Follow this and additional works at: https://scholarcommons.sc.edu/etd Part of the Mechanical Engineering Commons Recommended Citation Mobli, M.(2018). Characterization Of Evaporation/Condensation During Pool Boiling And Flow Boiling. (Doctoral dissertation). Retrieved from https://scholarcommons.sc.edu/etd/4898 This Open Access Dissertation is brought to you by Scholar Commons. It has been accepted for inclusion in Theses and Dissertations by an authorized administrator of Scholar Commons. For more information, please contact [email protected]. CHARACTERIZATION OF EVAPORATION/CONDENSATION DURING POOL BOILING AND FLOW BOILING by Mostafa Mobli Bachelor of Science University of Tehran, 2012 Master of Science University of South Carolina, 2014 Submitted in Partial Fulfillment of the Requirements For the Degree of Doctor of Philosophy in Mechanical Engineering College of Engineering and Computing University of South Carolina 2018 Accepted by: Chen Li, Major Professor Jamil Khan, Committee Member Tanvir Farouk, Committee Member Yi Sun, Committee Member Cheryl L. Addy, Vice Provost and Dean of the Graduate School © Copyright by Mostafa Mobli, 2018 All Rights Reserved. ii DEDICATION To my wife Sara and my parents, for their endless love, support, and encouragement. iii ACKNOWLEDGEMENTS I would like to express my deepest appreciation to my advisor Dr. Chen Li for his guidance, patience and support. Thank you for forcing me to look at research and my work in different ways. Thank you for believing in me and helping me stand up after every fall. -

Classification of Multiphase Systems
1.5 Multiphase Systems and Chapter 1: Introduction Phase Changes 1.5 Multiphase Systems and Phase Changes A multiphase system characterized by the simultaneous existence of several phases, the two-phase system being the simplest case. The term „two-component‟ is sometimes used to describe flows in which the phases consist of different chemical substances. example, steam-water flows are two-phase air-water flows are two-component Some two-component flows (mostly liquid-liquid) consist of a single- phase but are often called two-phase flows in which the term “phase” is applied to each of the components. Mathematics that describes two-phase or two-component flows is identical, the two expressions will therefore be treated as synonymous. Transport Phenomena in Multiphase Systems by Amir Faghri & Yuwen Zhang 1 1.5 Multiphase Systems and Chapter 1: Introduction Phase Changes Topics in the analysis of multiphase systems can include multiphase flow and multiphase heat transfer. When all of the phases in a multiphase system exist at the same temperature, multiphase flow is the only concern. However, when the temperatures of the individual phases are different, interphase heat transfer also occurs. If different phases of the same pure substance are present in a multiphase system, interphase heat transfer will result in a change of phase, always accompanied by interphase mass transfer. Combination of heat transfer with mass transfer during phase change is the feature that makes multiphase systems distinctly more challenging than simpler systems. Transport Phenomena in Multiphase Systems by Amir Faghri & Yuwen Zhang 2 1.5 Multiphase Systems and Chapter 1: Introduction Phase Changes Based on the phases that are involved in the system, phase change problems can be classified as: 1. -
Two Phase Flow in Power and Propulsion Workshop
NASA/TM—2003-212598 Results of the Workshop on Two-Phase Flow, Fluid Stability and Dynamics: Issues in Power, Propulsion, and Advanced Life Support Systems John McQuillen Glenn Research Center, Cleveland, Ohio Enrique Rame and Mohammad Kassemi National Center for Microgravity Research, Brook Park, Ohio Bhim Singh and Brian Motil Glenn Research Center, Cleveland, Ohio December 2003 The NASA STI Program Office . in Profile Since its founding, NASA has been dedicated to • CONFERENCE PUBLICATION. Collected the advancement of aeronautics and space papers from scientific and technical science. The NASA Scientific and Technical conferences, symposia, seminars, or other Information (STI) Program Office plays a key part meetings sponsored or cosponsored by in helping NASA maintain this important role. NASA. The NASA STI Program Office is operated by • SPECIAL PUBLICATION. Scientific, Langley Research Center, the Lead Center for technical, or historical information from NASA’s scientific and technical information. The NASA programs, projects, and missions, NASA STI Program Office provides access to the often concerned with subjects having NASA STI Database, the largest collection of substantial public interest. aeronautical and space science STI in the world. The Program Office is also NASA’s institutional • TECHNICAL TRANSLATION. English- mechanism for disseminating the results of its language translations of foreign scientific research and development activities. These results and technical material pertinent to NASA’s are published by NASA in the NASA STI Report mission. Series, which includes the following report types: Specialized services that complement the STI • TECHNICAL PUBLICATION. Reports of Program Office’s diverse offerings include completed research or a major significant creating custom thesauri, building customized phase of research that present the results of databases, organizing and publishing research NASA programs and include extensive data results . -

Fundamentals of Multiphase Heat Transfer and Flow
springer.com Amir Faghri, Yuwen Zhang Fundamentals of Multiphase Heat Transfer and Flow Explains fundamentals of analyzing multiphase flows and heat transfer, stressing liquid vapor (gas) two-phase flow, and fluid-solid (particle) flow, melting, solidification, sublimation, vapor deposition, condensation, evaporation, and boiling Generalizes macroscopic (integral) and microscopic (differential) conservation equations for multiphase heat transfer and fluid flow systems for both local- instance and averaged formulations Brings all three forms of phase change, i.e., liquid–vapor, solid–liquid, and solid–vapor, into one volume and describes them from one perspective Examines solid/liquid/vapor interfacial phenomena, emphasizing the 1st ed. 2020, XXXI, 820 p. 391 illus., 13 concepts of surface tension, wetting phenomena, disjoining pressure, illus. in color. This textbook presents a modern treatment of fundamentals of heat and mass transfer in the context of all types of multiphase flows with possibility of phase-changes among solid, liquid Printed book and vapor. It serves equally as a textbook for undergraduate senior and graduate students in a Hardcover wide variety of engineering disciplines including mechanical engineering, chemical engineering, 129,99 € | £109.99 | $159.99 material science and engineering, nuclear engineering, biomedical engineering, and [1]139,09 € (D) | 142,99 € (A) | CHF environmental engineering. Multiphase Heat Transfer and Flow can also be used to teach 153,50 contemporary and novel applications of heat and mass -

Surface Engineering for Phase Change Heat Transfer: a Review Daniel Attinger Iowa State University, [email protected]
View metadata, citation and similar papers at core.ac.uk brought to you by CORE provided by Digital Repository @ Iowa State University Mechanical Engineering Publications Mechanical Engineering 11-20-2014 Surface engineering for phase change heat transfer: A review Daniel Attinger Iowa State University, [email protected] Amy R. Betz Kansas State University Thomas M. Schutzuis University of Illinois at Chicago Ranjan Ganguly University of Illinois at Chicago Arindam Das University of Illinois at Chicago See next page for additional authors Follow this and additional works at: http://lib.dr.iastate.edu/me_pubs Part of the Heat Transfer, Combustion Commons The ompc lete bibliographic information for this item can be found at http://lib.dr.iastate.edu/ me_pubs/137. For information on how to cite this item, please visit http://lib.dr.iastate.edu/ howtocite.html. This Article is brought to you for free and open access by the Mechanical Engineering at Digital Repository @ Iowa State University. It has been accepted for inclusion in Mechanical Engineering Publications by an authorized administrator of Digital Repository @ Iowa State University. For more information, please contact [email protected]. Authors Daniel Attinger, Amy R. Betz, Thomas M. Schutzuis, Ranjan Ganguly, Arindam Das, Chang-Jin Kim, and Constantine M. Megaridis This article is available at Digital Repository @ Iowa State University: http://lib.dr.iastate.edu/me_pubs/137 MRS Energy & Sustainability : A Review Journal page 1 of 40 © Materials Research Society, 2014 doi:10.1557/mre.2014.9 REVIEW Daniel Attinger and Christophe Frankiewicz , Department of Surface engineering for phase Mechanical Engineering , Iowa State University , Ames , IA 50011 , USA Amy R. -
Photonically Enhanced and Controlled Pool Boiling Heat Transfer
PHOTONICALLY ENHANCED AND CONTROLLED POOL BOILING HEAT TRANSFER Thesis Submitted to The School of Engineering of the UNIVERSITY OF DAYTON In Partial Fulfillment of the Requirements for The Degree of Master of Science in Chemical Engineering By Nicholas Robert Glavin Dayton, OH August 2012 PHOTONICALLY ENHANCED AND CONTROLLED POOL BOILING HEAT TRANSFER Name: Glavin, Nicholas Robert APPROVED BY: Robert J. Wilkens, Ph.D., P.E. Chad N. Hunter, Ph.D. Advisory Committee Chairman Research Advisor Professor, Chemical and Materials Engineer Materials Engineering Department Air Force Research Laboratory Kevin J. Myers, D.Sc., P.E. Committee Member Professor, Chemical and Materials Engineering Department John G. Weber, Ph.D. Tony E. Saliba, Ph.D. Associate Dean Dean, School of Engineering School of Engineering & Wilke Distinguished Professor ii ABSTRACT PHOTONICALLY ENHANCED AND CONTROLLED POOL BOILING HEAT TRANSFER Name: Glavin, Nicholas Robert University of Dayton Research Advisor: Dr. Chad Hunter The high cooling requirements from modern day electronic devices have given rise to a need for alternative heat dissipation methods. State of the art liquid to vapor phase change cooling schemes provide a cooling rate orders of magnitude higher than current single phase systems. Boiling studies have long been performed with the goal to enhance critical boiling parameters such as heat transfer coefficient (HTC) and critical heat flux (CHF) by altering surface morphology. More recently, the desire for active control of boiling processes has been realized due to transient and dynamic changes in system cooling requirements. A means of controlling the boiling process by manipulating surface energy through light excitation can provide the necessary adaptive heat transfer properties.