General Relativity
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

A Mathematical Derivation of the General Relativistic Schwarzschild
A Mathematical Derivation of the General Relativistic Schwarzschild Metric An Honors thesis presented to the faculty of the Departments of Physics and Mathematics East Tennessee State University In partial fulfillment of the requirements for the Honors Scholar and Honors-in-Discipline Programs for a Bachelor of Science in Physics and Mathematics by David Simpson April 2007 Robert Gardner, Ph.D. Mark Giroux, Ph.D. Keywords: differential geometry, general relativity, Schwarzschild metric, black holes ABSTRACT The Mathematical Derivation of the General Relativistic Schwarzschild Metric by David Simpson We briefly discuss some underlying principles of special and general relativity with the focus on a more geometric interpretation. We outline Einstein’s Equations which describes the geometry of spacetime due to the influence of mass, and from there derive the Schwarzschild metric. The metric relies on the curvature of spacetime to provide a means of measuring invariant spacetime intervals around an isolated, static, and spherically symmetric mass M, which could represent a star or a black hole. In the derivation, we suggest a concise mathematical line of reasoning to evaluate the large number of cumbersome equations involved which was not found elsewhere in our survey of the literature. 2 CONTENTS ABSTRACT ................................. 2 1 Introduction to Relativity ...................... 4 1.1 Minkowski Space ....................... 6 1.2 What is a black hole? ..................... 11 1.3 Geodesics and Christoffel Symbols ............. 14 2 Einstein’s Field Equations and Requirements for a Solution .17 2.1 Einstein’s Field Equations .................. 20 3 Derivation of the Schwarzschild Metric .............. 21 3.1 Evaluation of the Christoffel Symbols .......... 25 3.2 Ricci Tensor Components ................. -

Aspects of Black Hole Physics
Aspects of Black Hole Physics Andreas Vigand Pedersen The Niels Bohr Institute Academic Advisor: Niels Obers e-mail: [email protected] Abstract: This project examines some of the exact solutions to Einstein’s theory, the theory of linearized gravity, the Komar definition of mass and angular momentum in general relativity and some aspects of (four dimen- sional) black hole physics. The project assumes familiarity with the basics of general relativity and differential geometry, but is otherwise intended to be self contained. The project was written as a ”self-study project” under the supervision of Niels Obers in the summer of 2008. Contents Contents ..................................... 1 Contents ..................................... 1 Preface and acknowledgement ......................... 2 Units, conventions and notation ........................ 3 1 Stationary solutions to Einstein’s equation ............ 4 1.1 Introduction .............................. 4 1.2 The Schwarzschild solution ...................... 6 1.3 The Reissner-Nordstr¨om solution .................. 18 1.4 The Kerr solution ........................... 24 1.5 The Kerr-Newman solution ..................... 28 2 Mass, charge and angular momentum (stationary spacetimes) 30 2.1 Introduction .............................. 30 2.2 Linearized Gravity .......................... 30 2.3 The weak field approximation .................... 35 2.3.1 The effect of a mass distribution on spacetime ....... 37 2.3.2 The effect of a charged mass distribution on spacetime .. 39 2.3.3 The effect of a rotating mass distribution on spacetime .. 40 2.4 Conserved currents in general relativity ............... 43 2.4.1 Komar integrals ........................ 49 2.5 Energy conditions ........................... 53 3 Black holes ................................ 57 3.1 Introduction .............................. 57 3.2 Event horizons ............................ 57 3.2.1 The no-hair theorem and Hawking’s area theorem .... -
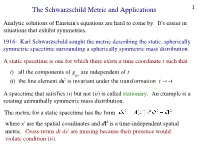
The Schwarzschild Metric and Applications 1
The Schwarzschild Metric and Applications 1 Analytic solutions of Einstein©s equations are hard to come by. It©s easier in situations that exhibit symmetries. 1916: Karl Schwarzschild sought the metric describing the static, spherically symmetric spacetime surrounding a spherically symmetric mass distribution. A static spacetime is one for which there exists a time coordinate t such that i) all the components of g are independent of t ii) the line element ds2 is invariant under the transformation t -t A spacetime that satisfies (i) but not (ii) is called stationary. An example is a rotating azimuthally symmetric mass distribution. The metric for a static spacetime has the form where xi are the spatial coordinates and dl2 is a time-independent spatial metric. Cross-terms dt dxi are missing because their presence would violate condition (ii). [Note: The Kerr metric, which describes the spacetime outside a rotating 2 axisymmetric mass distribution, contains a term ∝ dt d.] To preserve spherical symmetry, dl2 can be distorted from the flat-space metric only in the radial direction. In flat space, (1) r is the distance from the origin and (2) 4r2 is the area of a sphere. Let©s define r such that (2) remains true but (1) can be violated. Then, A(xi) A(r) in cases of spherical symmetry. The Ricci tensor for this metric is diagonal, with components SP 10.1 Primes denote differentiation with respect to r. The region outside the spherically symmetric mass distribution is empty. 3 The vacuum Einstein equations are R = 0. To find A(r) and B(r): 2. -

Laplacians in Geometric Analysis
LAPLACIANS IN GEOMETRIC ANALYSIS Syafiq Johar syafi[email protected] Contents 1 Trace Laplacian 1 1.1 Connections on Vector Bundles . .1 1.2 Local and Explicit Expressions . .2 1.3 Second Covariant Derivative . .3 1.4 Curvatures on Vector Bundles . .4 1.5 Trace Laplacian . .5 2 Harmonic Functions 6 2.1 Gradient and Divergence Operators . .7 2.2 Laplace-Beltrami Operator . .7 2.3 Harmonic Functions . .8 2.4 Harmonic Maps . .8 3 Hodge Laplacian 9 3.1 Exterior Derivatives . .9 3.2 Hodge Duals . 10 3.3 Hodge Laplacian . 12 4 Hodge Decomposition 13 4.1 De Rham Cohomology . 13 4.2 Hodge Decomposition Theorem . 14 5 Weitzenb¨ock and B¨ochner Formulas 15 5.1 Weitzenb¨ock Formula . 15 5.1.1 0-forms . 15 5.1.2 k-forms . 15 5.2 B¨ochner Formula . 17 1 Trace Laplacian In this section, we are going to present a notion of Laplacian that is regularly used in differential geometry, namely the trace Laplacian (also called the rough Laplacian or connection Laplacian). We recall the definition of connection on vector bundles which allows us to take the directional derivative of vector bundles. 1.1 Connections on Vector Bundles Definition 1.1 (Connection). Let M be a differentiable manifold and E a vector bundle over M. A connection or covariant derivative at a point p 2 M is a map D : Γ(E) ! Γ(T ∗M ⊗ E) 1 with the properties for any V; W 2 TpM; σ; τ 2 Γ(E) and f 2 C (M), we have that DV σ 2 Ep with the following properties: 1. -

Semiclassical Gravity and Quantum De Sitter
Semiclassical gravity and quantum de Sitter Neil Turok Perimeter Institute Work with J. Feldbrugge, J-L. Lehners, A. Di Tucci Credit: Pablo Carlos Budassi astonishing simplicity: just 5 numbers Measurement Error Expansion rate: 67.8±0.9 km s−1 Mpc−1 1% today (Temperature) 2.728 ± 0.004 K .1% (Age) 13.799 ±0.038 bn yrs .3% Baryon-entropy ratio 6±.1x10-10 1% energy Dark matter-baryon ratio 5.4± 0.1 2% Dark energy density 0.69±0.006 x critical 2% Scalar amplitude 4.6±0.006 x 10-5 1% geometry Scalar spectral index -.033±0.004 12% ns (scale invariant = 0) A dns 3 4 gw consistent +m 's; but Ωk , 1+ wDE , d ln k , δ , δ ..,r = A with zero ν s Nature has found a way to create a huge hierarchy of scales, apparently more economically than in any current theory A fascinating situation, demanding new ideas One of the most minimal is to revisit quantum cosmology The simplest of all cosmological models is de Sitter; interesting both for today’s dark energy and for inflation quantum cosmology reconsidered w/ S. Gielen 1510.00699, Phys. Rev. Le+. 117 (2016) 021301, 1612.0279, Phys. Rev. D 95 (2017) 103510. w/ J. Feldbrugge J-L. Lehners, 1703.02076, Phys. Rev. D 95 (2017) 103508, 1705.00192, Phys. Rev. Le+, 119 (2017) 171301, 1708.05104, Phys. Rev. D, in press (2017). w/A. Di Tucci, J. Feldbrugge and J-L. Lehners , in PreParaon (2017) Wheeler, Feynman, Quantum geometrodynamics De Wi, Teitelboim … sum over final 4-geometries 3-geometry (4) Σ1 gµν initial 3-geometry Σ0 fundamental object: Σ Σ ≡ 1 0 Feynman propagator 1 0 Basic object: phase space Lorentzian path integral 2 2 i 2 i (3) i j ADM : ds ≡ (−N + Ni N )dt + 2Nidtdx + hij dx dx Σ1 i (3) (3) i S 1 0 = DN DN Dh Dπ e ! ∫ ∫ ∫ ij ∫ ij Σ0 1 S = dt d 3x(π (3)h!(3) − N H i − NH) ∫0 ∫ ij ij i Basic references: C. -

MITOCW | 14. Linearized Gravity I: Principles and Static Limit
MITOCW | 14. Linearized gravity I: Principles and static limit. [SQUEAKING] [RUSTLING] [CLICKING] SCOTT All right, so in today's recorded lecture, I would like to pick up where we started-- HUGHES: excuse me. I'd like to pick up where we stopped last time. So I discussed the Einstein field equations in the previous two lectures. I derived them first from the method that was used by Einstein in his original work on the subject. And then I laid out the way of coming to the Einstein field equations using an action principle, using what we call the Einstein Hilbert action. Both of them lead us to this remarkably simple equation, if you think about it in terms simply of the curvature tensor. This is saying that a particular version of the curvature. You start with the Riemann tensor. You trace over two indices. You reverse the trace such that this whole thing has zero divergence. And you simply equate that to the stress energy tensor with a coupling factor with a complex constant proportionality that ensures that this recovers the Newtonian limit. The Einstein Hilbert exercise demonstrated that this is in a very quantifiable way, the simplest possible way of developing a theory of gravity in this framework. The remainder of this course is going to be dedicated to solving this equation, and exploring the properties of the solutions that arise from this. And so let me continue the discussion I began at the end of the previous lecture. We are going to find it very useful to regard this as a set of differential equations for the spacetime metric given a source. -

Kähler Manifolds, Ricci Curvature, and Hyperkähler Metrics
K¨ahlermanifolds, Ricci curvature, and hyperk¨ahler metrics Jeff A. Viaclovsky June 25-29, 2018 Contents 1 Lecture 1 3 1.1 The operators @ and @ ..........................4 1.2 Hermitian and K¨ahlermetrics . .5 2 Lecture 2 7 2.1 Complex tensor notation . .7 2.2 The musical isomorphisms . .8 2.3 Trace . 10 2.4 Determinant . 11 3 Lecture 3 11 3.1 Christoffel symbols of a K¨ahler metric . 11 3.2 Curvature of a Riemannian metric . 12 3.3 Curvature of a K¨ahlermetric . 14 3.4 The Ricci form . 15 4 Lecture 4 17 4.1 Line bundles and divisors . 17 4.2 Hermitian metrics on line bundles . 18 5 Lecture 5 21 5.1 Positivity of a line bundle . 21 5.2 The Laplacian on a K¨ahlermanifold . 22 5.3 Vanishing theorems . 25 6 Lecture 6 25 6.1 K¨ahlerclass and @@-Lemma . 25 6.2 Yau's Theorem . 27 6.3 The @ operator on holomorphic vector bundles . 29 1 7 Lecture 7 30 7.1 Holomorphic vector fields . 30 7.2 Serre duality . 32 8 Lecture 8 34 8.1 Kodaira vanishing theorem . 34 8.2 Complex projective space . 36 8.3 Line bundles on complex projective space . 37 8.4 Adjunction formula . 38 8.5 del Pezzo surfaces . 38 9 Lecture 9 40 9.1 Hirzebruch Signature Theorem . 40 9.2 Representations of U(2) . 42 9.3 Examples . 44 2 1 Lecture 1 We will assume a basic familiarity with complex manifolds, and only do a brief review today. Let M be a manifold of real dimension 2n, and an endomorphism J : TM ! TM satisfying J 2 = −Id. -

Linearized Einstein Field Equations
General Relativity Fall 2019 Lecture 15: Linearized Einstein field equations Yacine Ali-Ha¨ımoud October 17th 2019 SUMMARY FROM PREVIOUS LECTURE We are considering nearly flat spacetimes with nearly globally Minkowski coordinates: gµν = ηµν + hµν , with jhµν j 1. Such coordinates are not unique. First, we can make Lorentz transformations and keep a µ ν globally-Minkowski coordinate system, with hµ0ν0 = Λ µ0 Λ ν0 hµν , so that hµν can be seen as a Lorentz tensor µ µ µ ν field on flat spacetime. Second, if we make small changes of coordinates, x ! x − ξ , with j@µξ j 1, the metric perturbation remains small and changes as hµν ! hµν + 2ξ(µ,ν). By analogy with electromagnetism, we can see these small coordinate changes as gauge transformations, leaving the Riemann tensor unchanged at linear order. Since we will linearize the relevant equations, we may work in Fourier space: each Fourier mode satisfies an independent equation. We denote by ~k the wavenumber and by k^ its direction and k its norm. We have decomposed the 10 independent components of the metric perturbation according to their transformation properties under spatial rotations: there are 4 independent \scalar" components, which can be taken, for instance, ^i ^i^j to be h00; k h0i; hii, and k k hij { or any 4 linearly independent combinations thereof. There are 2 independent ilm^ ilm^ ^j transverse \vector" components, each with 2 independent components: klh0m and klhmjk { these are proportional to the curl of h0i and to the curl of the divergence of hij, and are divergenceless (transverse to the ~ TT Fourier wavenumber k). -

University of California Santa Cruz Quantum
UNIVERSITY OF CALIFORNIA SANTA CRUZ QUANTUM GRAVITY AND COSMOLOGY A dissertation submitted in partial satisfaction of the requirements for the degree of DOCTOR OF PHILOSOPHY in PHYSICS by Lorenzo Mannelli September 2005 The Dissertation of Lorenzo Mannelli is approved: Professor Tom Banks, Chair Professor Michael Dine Professor Anthony Aguirre Lisa C. Sloan Vice Provost and Dean of Graduate Studies °c 2005 Lorenzo Mannelli Contents List of Figures vi Abstract vii Dedication viii Acknowledgments ix I The Holographic Principle 1 1 Introduction 2 2 Entropy Bounds for Black Holes 6 2.1 Black Holes Thermodynamics ........................ 6 2.1.1 Area Theorem ............................ 7 2.1.2 No-hair Theorem ........................... 7 2.2 Bekenstein Entropy and the Generalized Second Law ........... 8 2.2.1 Hawking Radiation .......................... 10 2.2.2 Bekenstein Bound: Geroch Process . 12 2.2.3 Spherical Entropy Bound: Susskind Process . 12 2.2.4 Relation to the Bekenstein Bound . 13 3 Degrees of Freedom and Entropy 15 3.1 Degrees of Freedom .............................. 15 3.1.1 Fundamental System ......................... 16 3.2 Complexity According to Local Field Theory . 16 3.3 Complexity According to the Spherical Entropy Bound . 18 3.4 Why Local Field Theory Gives the Wrong Answer . 19 4 The Covariant Entropy Bound 20 4.1 Light-Sheets .................................. 20 iii 4.1.1 The Raychaudhuri Equation .................... 20 4.1.2 Orthogonal Null Hypersurfaces ................... 24 4.1.3 Light-sheet Selection ......................... 26 4.1.4 Light-sheet Termination ....................... 28 4.2 Entropy on a Light-Sheet .......................... 29 4.3 Formulation of the Covariant Entropy Bound . 30 5 Quantum Field Theory in Curved Spacetime 32 5.1 Scalar Field Quantization ......................... -

Black Hole Singularity Resolution Via the Modified Raychaudhuri
Black hole singularity resolution via the modified Raychaudhuri equation in loop quantum gravity Keagan Blanchette,a Saurya Das,b Samantha Hergott,a Saeed Rastgoo,a aDepartment of Physics and Astronomy, York University 4700 Keele Street, Toronto, Ontario M3J 1P3 Canada bTheoretical Physics Group and Quantum Alberta, Department of Physics and Astronomy, University of Lethbridge, 4401 University Drive, Lethhbridge, Alberta T1K 3M4, Canada E-mail: [email protected], [email protected], [email protected], [email protected] Abstract: We derive loop quantum gravity corrections to the Raychaudhuri equation in the interior of a Schwarzschild black hole and near the classical singularity. We show that the resulting effective equation implies defocusing of geodesics due to the appearance of repulsive terms. This prevents the formation of conjugate points, renders the singularity theorems inapplicable, and leads to the resolution of the singularity for this spacetime. arXiv:2011.11815v3 [gr-qc] 21 Apr 2021 Contents 1 Introduction1 2 Interior of the Schwarzschild black hole3 3 Classical dynamics6 3.1 Classical Hamiltonian and equations of motion6 3.2 Classical Raychaudhuri equation 10 4 Effective dynamics and Raychaudhuri equation 11 4.1 ˚µ scheme 14 4.2 µ¯ scheme 17 4.3 µ¯0 scheme 19 5 Discussion and outlook 22 1 Introduction It is well known that General Relativity (GR) predicts that all reasonable spacetimes are singular, and therefore its own demise. While a similar situation in electrodynamics was resolved in quantum electrodynamics, quantum gravity has not been completely formulated yet. One of the primary challenges of candidate theories such as string theory and loop quantum gravity (LQG) is to find a way of resolving the singularities. -

Notes on Semiclassical Gravity
ANNALS OF PHYSICS 196, 296-M (1989) Notes on Semiclassical Gravity T. P. SINGH AND T. PADMANABHAN Theoretical Astrophvsics Group, Tata Institute of Fundamental Research, Horn; Bhabha Road, Bombay 400005, India Received March 31, 1989; revised July 6, 1989 In this paper we investigate the different possible ways of defining the semiclassical limit of quantum general relativity. We discuss the conditions under which the expectation value of the energy-momentum tensor can act as the source for a semiclassical, c-number, gravitational field. The basic issues can be understood from the study of the semiclassical limit of a toy model, consisting of two interacting particles, which mimics the essential properties of quan- tum general relativity. We define and study the WKB semiclassical approximation and the gaussian semiclassical approximation for this model. We develop rules for Iinding the back- reaction of the quantum mode 4 on the classical mode Q. We argue that the back-reaction can be found using the phase of the wave-function which describes the dynamics of 4. We find that this back-reaction is obtainable from the expectation value of the hamiltonian if the dis- persion in this phase can be neglected. These results on the back-reaction are generalised to the semiclassical limit of the Wheeler-Dewitt equation. We conclude that the back-reaction in semiclassical gravity is ( Tlk) only when the dispersion in the phase of the matter wavefunc- tional can be neglected. This conclusion is highlighted with a minisuperspace example of a massless scalar field in a Robertson-Walker universe. We use the semiclassical theory to show that the minisuperspace approximation in quantum cosmology is valid only if the production of gravitons is negligible. -

Variational Problem and Bigravity Nature of Modified Teleparallel Theories
Variational Problem and Bigravity Nature of Modified Teleparallel Theories Martin Krˇsˇs´ak∗ Institute of Physics, University of Tartu, W. Ostwaldi 1, Tartu 50411, Estonia August 15, 2017 Abstract We consider the variational principle in the covariant formulation of modified telepar- allel theories with second order field equations. We vary the action with respect to the spin connection and obtain a consistency condition relating the spin connection with the tetrad. We argue that since the spin connection can be calculated using an additional reference tetrad, modified teleparallel theories can be interpreted as effectively bigravity theories. We conclude with discussion about the relation of our results and those obtained in the usual, non-covariant, formulation of teleparallel theories and present the solution to the problem of choosing the tetrad in f(T ) gravity theories. 1 Introduction Teleparallel gravity is an alternative formulation of general relativity that can be traced back to Einstein’s attempt to formulate the unified field theory [1–9]. Over the last decade, various modifications of teleparallel gravity became a popular tool to address the problem of the accelerated expansion of the Universe without invoking the dark sector [10–38]. The attractiveness of modifying teleparallel gravity–rather than the usual general relativity–lies in the fact that we obtain an entirely new class of modified gravity theories, which have second arXiv:1705.01072v3 [gr-qc] 13 Aug 2017 order field equations. See [39] for the extensive review. A well-known shortcoming of the original formulation of teleparallel theories is the prob- lem of local Lorentz symmetry violation [40, 41].