Possibilities of Increasing the Low Altitude Measurement Precision of Airborne Radio Altimeters
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Robust Integrated Ins/Radar Altimeter Accounting Faults at the Measurement Channels
ICAS 2002 CONGRESS ROBUST INTEGRATED INS/RADAR ALTIMETER ACCOUNTING FAULTS AT THE MEASUREMENT CHANNELS Ch. Hajiyev, R.Saltoglu (Istanbul Technical University) Keywords: Integrated Navigation, INS/Radar Altimeter, Robust Kalman Fillter, Error Model, Abstract was a milestone, and we were witnesses to these improvements in the near past. A great amount of In this study, the integrated navigation system, study has already been made about this issue. consisting of radio and INS altimeters, is Many more seem to be observed in the future. As presented. INS and the radio altimeter have many of these studies were examined, and some different benefits and drawbacks. The reason for useful information was reached. integrating these two navigators is mainly to Integrated navigation systems combine the combine the best features, and eliminate the best features of both autonomous and stand-alone shortcomings, briefly described above. systems and are not only capable of good short- The integration is achieved by using an term performance in the autonomous or stand- indirect Kalman filter. Hereby, the error models alone mode of operation, but also provide of the navigators are used by the Kalman filter to exceptional performance over extended periods estimate vertical channel parameters of the of time when in the aided mode. Integration thus navigation system. In the open loop system, INS brings increased performance, improved is the main source of information, and radio reliability and system integrity, and of course altimeter provides discrete aiding data to support increased complexity and cost [1,2]. Moreover, the estimations. outputs of an integrated navigation system are At the next step of the study, in case of digital, thus they are capable of being used by abnormal measurements, the performance of the other resources of being transmitted without loss integrated system is examined. -

Performance Improvement Methods for Terrain Database Integrity
PERFORMANCE IMPROVEMENT METHODS FOR TERRAIN DATABASE INTEGRITY MONITORS AND TERRAIN REFERENCED NAVIGATION A thesis presented to the Faculty of the Fritz J. and Dolores H. Russ College of Engineering and Technology of Ohio University In partial fulfillment of the requirements for the degree Master of Science Ananth Kalyan Vadlamani March 2004 This thesis entitled PERFORMANCE IMPROVEMENT METHODS FOR TERRAIN DATABASE INTEGRITY MONITORS AND TERRAIN REFERENCED NAVIGATION BY ANANTH KALYAN VADLAMANI has been approved for the School of Electrical Engineering and Computer Science and the Russ College of Engineering and Technology by Maarten Uijt de Haag Assistant Professor of Electrical Engineering and Computer Science R. Dennis Irwin Dean, Russ College of Engineering and Technology VADLAMANI, ANANTH K. M.S. March 2004. Electrical Engineering and Computer Science Performance Improvement Methods for Terrain Database Integrity Monitors and Terrain Referenced Navigation (115pp.) Director of Thesis: Maarten Uijt de Haag Terrain database integrity monitors and terrain-referenced navigation systems are based on performing a comparison between stored terrain elevations with data from airborne sensors like radar altimeters, inertial measurement units, GPS receivers etc. This thesis introduces the concept of a spatial terrain database integrity monitor and discusses methods to improve its performance. Furthermore, this thesis discusses an improvement of the terrain-referenced aircraft position estimation for aircraft navigation using only the information from downward-looking sensors and terrain databases, and not the information from the inertial measurement unit. Vertical and horizontal failures of the terrain database are characterized. Time and frequency domain techniques such as the Kalman filter, the autocorrelation function and spectral estimation are designed to evaluate the performance of the proposed integrity monitor and position estimator performance using flight test data from Eagle/Vail, CO, Juneau, AK, Asheville, NC and Albany, OH. -

Helicopter Solutions the Proof Is in the Performance Content
HELICOPTER SOLUTIONS THE PROOF IS IN THE PERFORMANCE CONTENT G500H TXi Flight Display 06 HSVT™ Synthetic Vision Technology 07 GTN™ Xi Series Navigators 08 Terrain Awareness and Warning System 10 GFC™ 600H Flight Control System 11 GNC® 255/GTR 225 Nav/Comm Radios 12 GMA™ Series Digital Audio Control 12 Flight Stream 110/210 Wireless Gateways 13 SiriusXM® Satellite Weather 14 GSR 56H Global Weather/Voice/Text 14 GTS™ Series Active Traffic 14 ADS-B Solutions 15 GTX™ Series All-in-one ADS-B Transponders 16 GDL® Series ADS-B Datalinks 16 GWX™ 75H Digital Weather Radar 17 GRA™ 55 Radar Altimeter 18 FltPlan.com Services 19 Product Specifications 20 PUT BETTER DECISION-MAKING TOOLS AT YOUR FINGERTIPS WITH GARMIN HELICOPTER AVIONICS The versatility that helicopters bring to the world of aviation is reflected in the wide range of missions they fly: emergency medical services, law enforcement, offshore logistics, search and rescue, aerial touring, heavy-lift, executive transport, pilot training and many more. Each has its own operational challenges. And for some, these challenges have grown — as busier airspace and ever-more- demanding flight environments have increased the focus on safety, industry wide. An FAA task force identified three primary areas where operational risks for helicopters need special attention: 1) inadvertent flight into instrument meteorological (IMC) conditions, 2) night operations, and 3) controlled flight into terrain (CFIT). Many ongoing studies have reinforced these findings. And in response, many operators are now asking for technologies that can proactively (and affordably) help address these safety issues. To that end, Garmin is focusing our decades of experience in aviation safety technology on the specialized needs of today’s helicopter community. -

Radar Altimeter True Altitude
RADAR ALTIMETER TRUE ALTITUDE. TRUE SAFETY. ROBUST AND RELIABLE IN RADARDEMANDING ENVIRONMENTS. Building on systems engineering and integration know-how, FreeFlight Systems effectively implements comprehensive, high-integrity avionics solutions. We are focused on the practical application of NextGen technology to real-world operational needs — OEM, retrofit, platform or infrastructure. FreeFlight Systems is a community of respected innovators in technologies of positioning, state-sensing, air traffic management datalinks — including rule-compliant ADS-B systems, data and flight management. An international brand, FreeFlight Systems is a trusted partner as well as a direct-source provider through an established network of relationships. 3 GENERATIONS OF EXPERIENCE BEHIND NEXTGEN AVIONICS NEXTGEN LEADER. INDUSTRY EXPERT. TRUSTED PARTNER. SHAPE THE SKIES. RADAR ALTIMETERS FreeFlight Systems’ certified radar altimeters work consistently in the harshest environments including rotorcraft low altitude hover and terrain transitions. RADAROur radar altimeter systems integrate with popular compatible glass displays. AL RA-4000/4500 & FreeFlight Systems modern radar altimeters are backed by more than 50 years of experience, and FRA-5500 RADAR ALTIMETERS have a proven track record as a reliable solution in Model RA-4000 RA-4500 FRA-5500 the most challenging and critical segments of flight. The TSO and ETSO-approved systems are extensively TSO-C87 l l l deployed worldwide in helicopter fleets, including ETSO-2C87 l l l some of the largest HEMS operations worldwide. DO-160E l l l DO-178 Level B l Designed for helicopter and seaplane operations, our DO-178B Level C l l radar altimeters provide precise AGL information from 2,500 feet to ground level. -
Airbus Erroneous Radio Altitudes Date Model Phase of Altitude Display / Messages/ Warning Flight 1
Airbus Erroneous Radio Altitudes Date Model Phase of Altitude Display / Messages/ Warning Flight 1. 18.8.2010 A320-232 During 3000 ft low read out & approach Too Low Gear Alert 2. 22.8.2010 A320-232 During 2500 ft Both RAs RA’s fluctuating down to approach 1500 ft + TAWS alerts 3. 23.8.2010 A320-232 RWY 30 200 ft "Retard” + Nav RA degraded 4. 059.2010 . A320-232 RWY 30 200 ft "Retard” + Nav RA degraded 5. 069.2010 . A320-232 After landing Nav RA degraded 6. 13.92010 . A320-232 After landing Nav RA degraded 7. 7.10.2010 A320-232 During Final 170 ft “Retard” RWY 30 8. 24.10.2010 A320-232 During 2500 ft “NAV RA2 fault" approach Date Model Phase of Flight Altitude Display / Messages/ Warning 9. 2610.2010 . A320-232 Right of RWY 30 4000 ft terrain + Pull Up 10. 2401.2011 . A340-300 Visual RWY 30, RA2 showed 50ft, RA1 diduring base turn shdhowed 2400ft, & “LDG no t down” 11. 2601.2011 . A320-232 Right of RWY 30 5000 ft “LDG not down” 12. 13.2.2011 A320-232 After landing Nav RA degraded 13. 15.2.2011 A330-200 PURLA 1C, 800 ft “too low terrain” RWY12 14..2 22 2011 . A320-232 RWY 30 4000 ft 3000ft & low gear and pull takeoff up 15. 23.2.2011 A330-200 SID RWY 30, 500 ft “LDG not down” during climb 11 14 15 9 3, 4, 7 13 1 2,8 10 • All the fa u lty readouts w ere receiv ed from pilots of Airbu s aeroplanes equipped with Thales ERT 530/540 radar altimeter . -

Aviation Occurrence Report Gear-Up Landing Cougar Helicopters Inc. Eurocopter As332l Super Puma (Helicopter) C-Gqch St. John=S
AVIATION OCCURRENCE REPORT GEAR-UP LANDING COUGAR HELICOPTERS INC. EUROCOPTER AS332L SUPER PUMA (HELICOPTER) C-GQCH ST. JOHN=S, NEWFOUNDLAND 01 JULY 1997 REPORT NUMBER A97A0136 The Transportation Safety Board of Canada (TSB) investigated this occurrence for the purpose of advancing transportation safety. It is not the function of the Board to assign fault or determine civil or criminal liability. Aviation Occurrence Report Gear-Up Landing Cougar Helicopters Inc. Eurocopter AS332L Super Puma (Helicopter) C-GQCH St. John=s, Newfoundland 01 July 1997 Report Number A97A0136 Summary The crew of the Super Puma helicopter, serial number 2139, were conducting an instrument landing system (ILS) approach to runway 29 in St. John=s, Newfoundland. As the helicopter was about to touch down, the crew realized that the helicopter was lower than normal and that the landing gear was still retracted. The crew began to bring the helicopter into a hover; however, as collective pitch was applied, the nose of the helicopter contacted the runway surface. Once the hover was established, the landing gear was lowered and the helicopter landed without further incident. Damage was confined to two communications antennae, and the supporting fuselage structure of the aircraft. There were no injuries to the 2 crew members or 11 passengers. 2 Other Factual Information The flight crew were certified and qualified for the flight in accordance to exsisting regulations. The occurrence flight was the second flight of the day for the flight crew. For the first flight of the day, the first crew member arrived at 0700 Newfoundland daylight time (NDT) for the planned morning flight. -

Radio Altimeter Industry Coalition Coalition Overview David Silver, Aerospace Industries Association
Radio Altimeter Industry Coalition Coalition Overview David Silver, Aerospace Industries Association 7/1/2021 2 Background • The aviation industry, working through a multi-stakeholder group formed after open, public invitation by RTCA, conducted a study to determine interference threshold to radio altimeters • The study found that 5G systems operating in the 3.7-3.98 GHz band will cause harmful interference altimeter systems operating in the 4.2- 4.4 GHz band – and in some cases far exceed interference thresholds • Harmful interference has the serious potential to impact public and aviation safety, create delays in aircraft operations, and prevent operations responding to emergency situations 7/1/2021 3 Goals and Way Forward • To ensure the safety of the public and aviation community, government, manufacturers, and operators must work together to: • Further refine the full scope of the interference threat • Determine operational environments affected • Identify technical solutions that will resolve interference issues • Develop future standards • Government needs to bring the telecom and aviation industries to the table to refine understanding of the extent of the problem and collaboratively develop mitigations to address the changing spectrum environment near-, mid-, and long- term. 7/1/2021 4 Coalition Tech-Ops Presentation John Shea, Helicopter Association International Sai Kalyanaraman, Ph.D., Collins Aerospace 7/1/2021 5 What is a Radar Altimeter? • Radar altimeters are the only device on the aircraft that can directly measure the distance between the aircraft and the ground and only operate in 4200-4400 MHz • Operate when the aircraft is on the surface to over 2500’ above ground Radar Altimeter Antennas Radar Altimeter Antennas Photo credit: Honeywell Photo credit: ALPA 7/1/2021 6 How Does a Radar Altimeter Work? 1. -
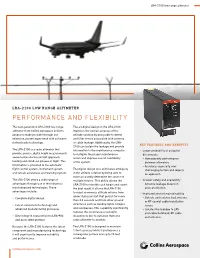
Performance and Flexibility
LRA-2100 low range altimeter LRA-2100 LOW RANGE ALTIMETER PERFORMANCE AND FLEXIBILITY The next-generation LRA-2100 low range The all-digital design of the LRA-2100 altimeter from Collins Aerospace delivers improves the overall accuracy of the advances made possible through our altitude solution by being able to detect extensive, proven experience with software- and filter errors associated with antenna defined radio technology. or cable leakage. Additionally, the LRA- KEY FEATURES AND BENEFITS 2100 can isolate the leakage and provide The LRA-2100 is a radio altimeter that information to the maintenance computer • Lower probability of autopilot provides precise, digital height measurements to instigate the proper maintenance disconnects above terrain during aircraft approach, action and improve overall availability – Homogeneity performance landing and climb-out phases of flight. This of the system. between altimeters information is provided to the automatic – Accuracy, especially over flight control system, instrument system The digital design also eliminates ambiguity challenging terrain and objects and terrain awareness and warning system. in the altitude solution by being able to on approach more accurately determine the source of The LRA-2100 offers a wide range of multiple returns. This ability allows the • Greater safety and availability advantages through use of the industry’s LRA-2100 to identify each target and report – Antenna leakage detection most advanced technologies. These the best result. It allows the LRA-2100 and cancellation advantages include: to reject erroneous altitude returns from • Improved aircraft maintainability under-flying aircraft that persist for more • Complete digital design – Detects and isolates bad antenna than 2.5 seconds and from other ground or RF coaxial cable installation • Latest component technology and structures such as landing lights, bridges issues advanced manufacturing processes and overpasses. -
Flight Control Systems Development and Flight Test Exp(6Rience With
NASA Technical Paper 2822 June 1988 Flight Control Systems Development and Flight Test Exp(6rienceWith the HiMAT Research Vehicles Robert W. Kernpel and Michael R. &ark (bAS1-Ik-282.k) kllGtllI CChlECl SYSTEHS N89-15929 LEVELCCMEkS AND FLlGHl 'XES2 ELEEBlEhCE kIlH ItE iliMA? KESkAICt VEHICLES (bASB) U8 p CSCL OlC Unclas 81/08 016S7tl NASA NASA Tech nica I Paper 2822 1988 Flight Control Systems Development and Flight - Test Experience With the HiMAT Research Vehicles Robert W. Kempel and Michael R. Earls Ames Research Center Dryden Flight Research Facility Edwarcls, Calfornia National Aeronautics and Space Administration Scientific and Technical Information Division CONTENTS SUMMARY 1 INTRODUCTION 1 NOMENCLATURE 1 Letter and Mathematical Symbols ................................... 1 Abbreviations ............................................... 2 HiMAT VEHICLE DESCRIPTION AND OPERATIONAL PROCEDURE 2 HiMAT SYSTEMS DESCRIPTIONS 3 Systems Overview ............................................ 3 Ground Systems ............................................. 4 Downlink Receiving Station .................................... 4 V-77 Computer ........................................... 4 Pilot’s and Flight Test Engineer’s Station ............................ 4 Control Law. Maneuver. and Navigation Computers ...................... 4 Uplink Encoder ........................................... 5 Airborne Systems ............................................. 5 Uplink Receivers-Diversity Combiner-Decoders ......................... 5 Airborne Computers ....................................... -

Radar Altimeter True Altitude
RADAR ALTIMETER TRUE ALTITUDE. TRUE SAFETY. ROBUST AND RELIABLE IN RADARDEMANDING ENVIRONMENTS. Building on systems engineering and integration know-how, FreeFlight Systems effectively implements comprehensive, high-integrity avionics solutions. We are focused on the practical application of NextGen technology to real-world operational needs — OEM, retrofit, platform or infrastructure. FreeFlight Systems is a community of respected innovators in technologies of positioning, state-sensing, air traffic management datalinks — including rule-compliant ADS-B systems, data and flight management. An international brand, FreeFlight Systems is a trusted partner as well as a direct-source provider through an established network of relationships. 3 GENERATIONS OF EXPERIENCE BEHIND NEXTGEN AVIONICS NEXTGEN LEADER. INDUSTRY EXPERT. TRUSTED PARTNER. SHAPE THE SKIES. RADAR ALTIMETERS FreeFlight Systems’ certifed radar altimeters work consistently in the harshest environments including rotorcraft low altitude hover and terrain transitions. Our radar altimeter systems meet the Helicopter Safety Rule for RADARradar altimeter equipage and integrate with compatible glass displays. AL RA-4000/4500 & FRA-5500 RADAR ALTIMETERS RAD-40 DISPLAY Model RA-4000 RA-4500 FRA-5500 SPECIFICATIONS TSO-C87 l l l Model RAD-40 ETSO-2C87 l l l Decision Height 10 ft. increments up to 200 ft. Selection 50 ft. increments from 200 ft. to 950 ft. DO-160E l l l Self-test Lights all “8’s” for LEDs and activates the DO-178 Level B l DH LED DO-178B Level C l l DH Alert Internal DH LED and external discrete output RS-485/422 l l l Service Ceiling 50,000 ft. RS-232 l l l CERTIFICATIONS ARINC 429 l l System TSO-C87 SPECIFICATIONS Environmental DO-160F Frequency Modulated continuous wave at 4.3 GHz center Software Assurance DO-178B Level C frequency, 100 MHz sweep at 4.25 to 4.35 GHz PHYSICAL CHARACTERISTICS Altitude Range -20 to 2,500 ft. -

FLIGHT-CRITICAL SYSTEMS DESIGN ASSURANCE July 2012 6
DOT/FAA/AR-11/28 Flight-Critical Systems Design Federal Aviation Administration William J. Hughes Technical Center Assurance Aviation Research Division Atlantic City International Airport New Jersey 08405 July 2012 Final Report This document is available to the U.S. public through the National Technical Information Services (NTIS), Springfield, Virginia 22161. This document is also available from the Federal Aviation Administration William J. Hughes Technical Center at actlibrary.tc.faa.gov. U.S. Department of Transportation Federal Aviation Administration NOTICE This document is disseminated under the sponsorship of the U.S. Department of Transportation in the interest of information exchange. The United States Government assumes no liability for the contents or use thereof. The United States Government does not endorse products or manufacturers. Trade or manufacturer’s names appear herein solely because they are considered essential to the objective of this report. The findings and conclusions in this report are those of the author(s) and do not necessarily represent the views of the funding agency. This document does not constitute FAA policy. Consult the FAA sponsoring organization listed on the Technical Documentation page as to its use. This report is available at the Federal Aviation Administration William J. Hughes Technical Center’s Full-Text Technical Reports page: actlibrary.tc.faa.gov in Adobe Acrobat portable document format (PDF). Technical Report Documentation Page 1. Report No. 2. Government Accession No. 3. Recipient’s Catalog No. DOT/FAA/AR-11/28 4. Title and Subtitle 5. Report Date FLIGHT-CRITICAL SYSTEMS DESIGN ASSURANCE July 2012 6. Performing Organization Code 7. Author(s) 8. -

Radar Altimeters the Accurate, Reliable, and Affordable Safety Solution
RADAR ALTIMETERS THE ACCURATE, RELIABLE, AND AFFORDABLE SAFETY SOLUTION For critical flight regimes, the FreeFlight Systems RA-4000 and RA-4500 Radar Altimeters (TSO and ETSO approved) provide today’s flight crews with dependable, highly accurate and economical above-ground-level (AGL) information. This real-time system enhances operational safety during approaches, night time operations, and hazardous flight above rough terrain. Designed for applications such as helicopter and seaplane operations where accuracy is needed down to zero feet, the RA-4000 and RA-4500 Radar Altimeters provide precise AGL information from 2,500 feet down to ground level. The RA-4500 Radar Altimeter with its ARINC 429 output can be easily coupled with electronic flight information systems (EFIS) and flight director systems. Proven and precise, both systems offer improved situational awareness for a broad range of fixed and rotary wing aircraft. FreeFlight Systems has over 50 years experience in Radar Altimetry and our systems have hard won, proven performance in the most challenging and critical segments of flight such as low altitude hover in rotorcraft, flare/touchdown in fixed wing aircraft and slow transition over varying Radar Altimeter terrain. Our unique combination of deep experience with a modern digital implementation makes FreeFlight Systems altimeters the only affordable choice for serious users. RAD-40 Radar Altimeter Display The RAD-40 Radar Altimeter Display is compatible with the FreeFlight Systems RA-4000 and RA-4500 Radar Altimeters. This panel-mount display provides critical AGL information to the pilot which is especially important when there are no visual clues to the landscape surrounding the airport or the flight path.