Wave Motion (II)
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Foundations of Newtonian Dynamics: an Axiomatic Approach For
Foundations of Newtonian Dynamics: 1 An Axiomatic Approach for the Thinking Student C. J. Papachristou 2 Department of Physical Sciences, Hellenic Naval Academy, Piraeus 18539, Greece Abstract. Despite its apparent simplicity, Newtonian mechanics contains conceptual subtleties that may cause some confusion to the deep-thinking student. These subtle- ties concern fundamental issues such as, e.g., the number of independent laws needed to formulate the theory, or, the distinction between genuine physical laws and deriva- tive theorems. This article attempts to clarify these issues for the benefit of the stu- dent by revisiting the foundations of Newtonian dynamics and by proposing a rigor- ous axiomatic approach to the subject. This theoretical scheme is built upon two fun- damental postulates, namely, conservation of momentum and superposition property for interactions. Newton’s laws, as well as all familiar theorems of mechanics, are shown to follow from these basic principles. 1. Introduction Teaching introductory mechanics can be a major challenge, especially in a class of students that are not willing to take anything for granted! The problem is that, even some of the most prestigious textbooks on the subject may leave the student with some degree of confusion, which manifests itself in questions like the following: • Is the law of inertia (Newton’s first law) a law of motion (of free bodies) or is it a statement of existence (of inertial reference frames)? • Are the first two of Newton’s laws independent of each other? It appears that -

Overview of the CALET Mission to the ISS 1 Introduction
32ND INTERNATIONAL COSMIC RAY CONFERENCE,BEIJING 2011 Overview of the CALET Mission to the ISS SHOJI TORII1,2 FOR THE CALET COLLABORATION 1Research Institute for Scinece and Engineering, Waseda University 2Space Environment Utilization Center, JAXA [email protected] DOI: 10.7529/ICRC2011/V06/0615 Abstract: The CALorimetric Electron Telescope (CALET) mission is being developed as a standard payload for the Exposure Facility of the Japanese Experiment Module (JEM/EF) on the International Space Station (ISS). The instrument consists of a segmented plastic scintillator charge measuring module, an imaging calorimeter consisting of 8 scintillating fiber planes with a total of 3 radiation lengths of tungsten plates interleaved with the fiber planes, and a total absorption calorimeter consisting of crossed PWO logs with a total depth of 27 radiation lengths. The major scientific objectives for CALET are to search for nearby cosmic ray sources and dark matter by carrying out a precise measurement of the electron spectrum (1 GeV - 20 TeV) and observing gamma rays (10 GeV - 10 TeV). CALET has a unique capability to observe electrons and gamma rays in the TeV region since the hadron rejection power is larger than 105 and the energy resolution better than 2 % above 100 GeV. CALET has also the capability to measure cosmic ray H, He and heavy nuclei up to 1000 TeV.∼ The instrument will also monitor solar activity and search for gamma ray transients. The phase B study has started, aimed at a launch in 2013 by H-II Transfer Vehicle (HTV) for a 5 year observation period on JEM/EF. -

Chapter 11.Pdf
Chapter 11. Kinematics of Particles Contents Introduction Rectilinear Motion: Position, Velocity & Acceleration Determining the Motion of a Particle Sample Problem 11.2 Sample Problem 11.3 Uniform Rectilinear-Motion Uniformly Accelerated Rectilinear-Motion Motion of Several Particles: Relative Motion Sample Problem 11.5 Motion of Several Particles: Dependent Motion Sample Problem 11.7 Graphical Solutions Curvilinear Motion: Position, Velocity & Acceleration Derivatives of Vector Functions Rectangular Components of Velocity and Acceleration Sample Problem 11.10 Motion Relative to a Frame in Translation Sample Problem 11.14 Tangential and Normal Components Sample Problem 11.16 Radial and Transverse Components Sample Problem 11.18 Introduction Kinematic relationships are used to help us determine the trajectory of a snowboarder completing a jump, the orbital speed of a satellite, and accelerations during acrobatic flying. Dynamics includes: Kinematics: study of the geometry of motion. Relates displacement, velocity, acceleration, and time without reference to the cause of motion. Fdownforce Fdrive Fdrag Kinetics: study of the relations existing between the forces acting on a body, the mass of the body, and the motion of the body. Kinetics is used to predict the motion caused by given forces or to determine the forces required to produce a given motion. Particle kinetics includes : • Rectilinear motion: position, velocity, and acceleration of a particle as it moves along a straight line. • Curvilinear motion : position, velocity, and acceleration of a particle as it moves along a curved line in two or three dimensions. Rectilinear Motion: Position, Velocity & Acceleration • Rectilinear motion: particle moving along a straight line • Position coordinate: defined by positive or negative distance from a fixed origin on the line. -

Chapter 3 Motion in Two and Three Dimensions
Chapter 3 Motion in Two and Three Dimensions 3.1 The Important Stuff 3.1.1 Position In three dimensions, the location of a particle is specified by its location vector, r: r = xi + yj + zk (3.1) If during a time interval ∆t the position vector of the particle changes from r1 to r2, the displacement ∆r for that time interval is ∆r = r1 − r2 (3.2) = (x2 − x1)i +(y2 − y1)j +(z2 − z1)k (3.3) 3.1.2 Velocity If a particle moves through a displacement ∆r in a time interval ∆t then its average velocity for that interval is ∆r ∆x ∆y ∆z v = = i + j + k (3.4) ∆t ∆t ∆t ∆t As before, a more interesting quantity is the instantaneous velocity v, which is the limit of the average velocity when we shrink the time interval ∆t to zero. It is the time derivative of the position vector r: dr v = (3.5) dt d = (xi + yj + zk) (3.6) dt dx dy dz = i + j + k (3.7) dt dt dt can be written: v = vxi + vyj + vzk (3.8) 51 52 CHAPTER 3. MOTION IN TWO AND THREE DIMENSIONS where dx dy dz v = v = v = (3.9) x dt y dt z dt The instantaneous velocity v of a particle is always tangent to the path of the particle. 3.1.3 Acceleration If a particle’s velocity changes by ∆v in a time period ∆t, the average acceleration a for that period is ∆v ∆v ∆v ∆v a = = x i + y j + z k (3.10) ∆t ∆t ∆t ∆t but a much more interesting quantity is the result of shrinking the period ∆t to zero, which gives us the instantaneous acceleration, a. -

Music Synthesis
MUSIC SYNTHESIS Sound synthesis is the art of using electronic devices to create & modify signals that are then turned into sound waves by a speaker. Making Waves: WGRL - 2015 Oscillators An oscillator generates a consistent, repeating signal. Signals from oscillators and other sources are used to control the movement of the cones in our speakers, which make real sound waves which travel to our ears. An oscillator wiggles an audio signal. DEMONSTRATE: If you tie one end of a rope to a doorknob, stand back a few feet, and wiggle the other end of the rope up and down really fast, you're doing roughly the same thing as an oscillator. REVIEW: Frequency and pitch Frequency, measured in cycles/second AKA Hertz, is the rate at which a sound wave moves in and out. The length of a signal cycle of a waveform is the span of time it takes for that waveform to repeat. People generally hear an increase in the frequency of a sound wave as an increase in pitch. F DEMONSTRATE: an oscillator generating a signal that repeats at the rate of 440 cycles per second will have the same pitch as middle A on a piano. An oscillator generating a signal that repeats at 880 cycles per second will have the same pitch as the A an octave above middle A. Types of Waveforms: SINE The SINE wave is the most basic, pure waveform. These simple waves have only one frequency. Any other waveform can be created by adding up a series of sine waves. In this picture, the first two sine waves In this picture, a sine wave is added to its are added together to produce a third. -

A Uniformly Moving and Rotating Polarizable Particle in Thermal Radiation Field: Frictional Force and Torque, Radiation and Heating
A uniformly moving and rotating polarizable particle in thermal radiation field: frictional force and torque, radiation and heating G. V. Dedkov1 and A.A. Kyasov Nanoscale Physics Group, Kabardino-Balkarian State University, Nalchik, 360000, Russia Abstract. We study the fluctuation-electromagnetic interaction and dynamics of a small spinning polarizable particle moving with a relativistic velocity in a vacuum background of arbitrary temperature. Using the standard formalism of the fluctuation electromagnetic theory, a complete set of equations describing the decelerating tangential force, the components of the torque and the intensity of nonthermal and thermal radiation is obtained along with equations describing the dynamics of translational and rotational motion, and the kinetics of heating. An interplay between various parameters is discussed. Numerical estimations for conducting particles were carried out using MATHCAD code. In the case of zero temperature of a particle and background radiation, the intensity of radiation is independent of the linear velocity, the angular velocity orientation and the linear velocity value are independent of time. In the case of a finite background radiation temperature, the angular velocity vector tends to be oriented perpendicularly to the linear velocity vector. The particle temperature relaxes to a quasistationary value depending on the background radiation temperature, the linear and angular velocities, whereas the intensity of radiation depends on the background radiation temperature, the angular and linear velocities. The time of thermal relaxation is much less than the time of angular deceleration, while the latter time is much less than the time of linear deceleration. Key words: fluctuation-electromagnetic interaction, thermal radiation, rotating particle, frictional torque and tangential friction force 1. -

Particle Acceleration at Interplanetary Shocks
PARTICLE ACCELERATION AT INTERPLANETARY SHOCKS G.P. ZANK, Gang LI, and Olga VERKHOGLYADOVA Institute of Geophysics and Planetary Physics (IGPP), University of California, Riverside, CA 92521, U.S.A. ([email protected], [email protected], [email protected]) Received ; accepted Abstract. Proton acceleration at interplanetary shocks is reviewed briefly. Understanding this is of importance to describe the acceleration of heavy ions at interplanetary shocks since wave excitation, and hence particle scattering, at oblique shocks is controlled by the protons and not the heavy ions. Heavy ions behave as test particles and their acceler- ation characteristics are controlled by the properties of proton excited turbulence. As a result, the resonance condition for heavy ions introduces distinctly di®erent signatures in abundance, spectra, and intensity pro¯les, depending on ion mass and charge. Self- consistent models of heavy ion acceleration and the resulting fractionation are discussed. This includes discussion of the injection problem and the acceleration characteristics of quasi-parallel and quasi-perpendicular shocks. Keywords: Solar energetic particles, coronal mass ejections, particle acceleration 1. Introduction Understanding the problem of particle acceleration at interplanetary shocks is assuming increasing importance, especially in the context of understanding the space environment. The basic physics is thought to have been established in the late 1970s and 1980s with the seminal papers of Axford et al. (1977); Bell, (1978a,b), but detailed interplanetary observations are not easily in- terpreted in terms of the simple original models of particle acceleration at shock waves. Three fundamental aspects make the interplanetary problem more complicated than the typical astrophysical problem: the time depen- dence of the acceleration and the solar wind background; the geometry of the shock; and the long mean free path for particle transport away from the shock. -
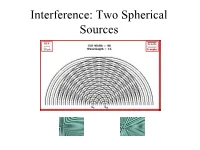
Interference: Two Spherical Sources Superposition
Interference: Two Spherical Sources Superposition Interference Waves ADD: Constructive Interference. Waves SUBTRACT: Destructive Interference. In Phase Out of Phase Superposition Traveling waves move through each other, interfere, and keep on moving! Pulsed Interference Superposition Waves ADD in space. Any complex wave can be built from simple sine waves. Simply add them point by point. Simple Sine Wave Simple Sine Wave Complex Wave Fourier Synthesis of a Square Wave Any periodic function can be represented as a series of sine and cosine terms in a Fourier series: y() t ( An sin2ƒ n t B n cos2ƒ) n t n Superposition of Sinusoidal Waves • Case 1: Identical, same direction, with phase difference (Interference) Both 1-D and 2-D waves. • Case 2: Identical, opposite direction (standing waves) • Case 3: Slightly different frequencies (Beats) Superposition of Sinusoidal Waves • Assume two waves are traveling in the same direction, with the same frequency, wavelength and amplitude • The waves differ in phase • y1 = A sin (kx - wt) • y2 = A sin (kx - wt + f) • y = y1+y2 = 2A cos (f/2) sin (kx - wt + f/2) Resultant Amplitude Depends on phase: Spatial Interference Term Sinusoidal Waves with Constructive Interference y = y1+y2 = 2A cos (f/2) sin (kx - wt + f /2) • When f = 0, then cos (f/2) = 1 • The amplitude of the resultant wave is 2A – The crests of one wave coincide with the crests of the other wave • The waves are everywhere in phase • The waves interfere constructively Sinusoidal Waves with Destructive Interference y = y1+y2 = 2A cos (f/2) -

Chapter 1 Waves in Two and Three Dimensions
Chapter 1 Waves in Two and Three Dimensions In this chapter we extend the ideas of the previous chapter to the case of waves in more than one dimension. The extension of the sine wave to higher dimensions is the plane wave. Wave packets in two and three dimensions arise when plane waves moving in different directions are superimposed. Diffraction results from the disruption of a wave which is impingent upon an object. Those parts of the wave front hitting the object are scattered, modified, or destroyed. The resulting diffraction pattern comes from the subsequent interference of the various pieces of the modified wave. A knowl- edge of diffraction is necessary to understand the behavior and limitations of optical instruments such as telescopes. Diffraction and interference in two and three dimensions can be manipu- lated to produce useful devices such as the diffraction grating. 1.1 Math Tutorial — Vectors Before we can proceed further we need to explore the idea of a vector. A vector is a quantity which expresses both magnitude and direction. Graph- ically we represent a vector as an arrow. In typeset notation a vector is represented by a boldface character, while in handwriting an arrow is drawn over the character representing the vector. Figure 1.1 shows some examples of displacement vectors, i. e., vectors which represent the displacement of one object from another, and introduces 1 CHAPTER 1. WAVES IN TWO AND THREE DIMENSIONS 2 y Paul B y B C C y George A A y Mary x A x B x C x Figure 1.1: Displacement vectors in a plane. -
Tektronix Signal Generator
Signal Generator Fundamentals Signal Generator Fundamentals Table of Contents The Complete Measurement System · · · · · · · · · · · · · · · 5 Complex Waves · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · 15 The Signal Generator · · · · · · · · · · · · · · · · · · · · · · · · · · · · 6 Signal Modulation · · · · · · · · · · · · · · · · · · · · · · · · · · · 15 Analog or Digital? · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · 7 Analog Modulation · · · · · · · · · · · · · · · · · · · · · · · · · 15 Basic Signal Generator Applications· · · · · · · · · · · · · · · · 8 Digital Modulation · · · · · · · · · · · · · · · · · · · · · · · · · · 15 Verification · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · 8 Frequency Sweep · · · · · · · · · · · · · · · · · · · · · · · · · · · 16 Testing Digital Modulator Transmitters and Receivers · · 8 Quadrature Modulation · · · · · · · · · · · · · · · · · · · · · 16 Characterization · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · 8 Digital Patterns and Formats · · · · · · · · · · · · · · · · · · · 16 Testing D/A and A/D Converters · · · · · · · · · · · · · · · · · 8 Bit Streams · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · 17 Stress/Margin Testing · · · · · · · · · · · · · · · · · · · · · · · · · · · 9 Types of Signal Generators · · · · · · · · · · · · · · · · · · · · · · 17 Stressing Communication Receivers · · · · · · · · · · · · · · 9 Analog and Mixed Signal Generators · · · · · · · · · · · · · · 18 Signal Generation Techniques -

Estimation of Acoustic Particle Motion and Source Bearing Using a Drifting Hydrophone Array Near a River Current Turbine to Assess Disturbances to Fish
Estimation of Acoustic Particle Motion and Source Bearing Using a Drifting Hydrophone Array Near a River Current Turbine to Assess Disturbances to Fish Paul G. Murphy A thesis submitted in partial fulfillment of the requirements for the degree of Master of Science in Mechanical Engineering University of Washington 2015 Committee: Peter H. Dahl Brian Polagye David Dall’Osto Program Authorized to Offer Degree: Mechanical Engineering ©Copyright 2015 Paul Murphy University of Washington Abstract Estimation of Acoustic Particle Motion and Source Bearing Using a Drifting Hydrophone Array Near a River Current Turbine to Assess Disturbances to Fish Paul G. Murphy Co-Chair of the Supervisory Committee: Professor Peter Dahl Mechanical Engineering Co-Chair of the Supervisory Committee: Professor Brian Polagye Mechanical Engineering River hydrokinetic turbines may be an economical alternative to traditional energy sources for small communities on Alaskan rivers. However, there is concern that sound from these turbines could affect sockeye salmon (Oncorhynchus nerka), an important resource for small, subsistence based communities, commercial fisherman, and recreational anglers. The hearing sensitivity of sockeye salmon has not been quantified, but behavioral responses to sounds at frequencies less than a few hundred Hertz have been documented for Atlantic salmon (Salmo salar), and particle motion is thought to be the primary mode of stimulation. Methods of measuring acoustic particle motion are well- established, but have rarely been necessary in energetic areas, such as river and tidal current environments. In this study, the acoustic pressure in the vicinity of an operating river current turbine is measured using a freely drifting hydrophone array. Analysis of turbine sound reveals tones that vary in frequency and magnitude with turbine rotation rate, and that may sockeye salmon may sense. -

Fourier Analysis
FOURIER ANALYSIS Lucas Illing 2008 Contents 1 Fourier Series 2 1.1 General Introduction . 2 1.2 Discontinuous Functions . 5 1.3 Complex Fourier Series . 7 2 Fourier Transform 8 2.1 Definition . 8 2.2 The issue of convention . 11 2.3 Convolution Theorem . 12 2.4 Spectral Leakage . 13 3 Discrete Time 17 3.1 Discrete Time Fourier Transform . 17 3.2 Discrete Fourier Transform (and FFT) . 19 4 Executive Summary 20 1 1. Fourier Series 1 Fourier Series 1.1 General Introduction Consider a function f(τ) that is periodic with period T . f(τ + T ) = f(τ) (1) We may always rescale τ to make the function 2π periodic. To do so, define 2π a new independent variable t = T τ, so that f(t + 2π) = f(t) (2) So let us consider the set of all sufficiently nice functions f(t) of a real variable t that are periodic, with period 2π. Since the function is periodic we only need to consider its behavior on one interval of length 2π, e.g. on the interval (−π; π). The idea is to decompose any such function f(t) into an infinite sum, or series, of simpler functions. Following Joseph Fourier (1768-1830) consider the infinite sum of sine and cosine functions 1 a0 X f(t) = + [a cos(nt) + b sin(nt)] (3) 2 n n n=1 where the constant coefficients an and bn are called the Fourier coefficients of f. The first question one would like to answer is how to find those coefficients.