Robot Control Techniques Editor: Paul Frenger, P O
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Downloading a Package
man pages section 4: File Formats Part No: E29042 October 2012 Copyright © 2012, 2013, Oracle and/or its affiliates. All rights reserved. This software and related documentation are provided under a license agreement containing restrictions on use and disclosure and are protected by intellectual property laws. Except as expressly permitted in your license agreement or allowed by law, you may not use, copy, reproduce, translate, broadcast, modify, license, transmit, distribute, exhibit, perform, publish, or display any part, in any form, or by any means. Reverse engineering, disassembly, or decompilation of this software, unless required by law for interoperability, is prohibited. The information contained herein is subject to change without notice and is not warranted to be error-free. If you find any errors, please report them to us in writing. If this is software or related documentation that is delivered to the U.S. Government or anyone licensing it on behalf of the U.S. Government, the following notice is applicable: U.S. GOVERNMENT END USERS. Oracle programs, including any operating system, integrated software, any programs installed on the hardware, and/or documentation, delivered to U.S. Government end users are "commercial computer software" pursuant to the applicable Federal Acquisition Regulation and agency-specific supplemental regulations. As such, use, duplication, disclosure, modification, and adaptation of the programs, including anyoperating system, integrated software, any programs installed on the hardware, and/or documentation, shall be subject to license terms and license restrictions applicable to the programs. No other rights are granted to the U.S. Government. This software or hardware is developed for general use in a variety of information management applications. -

Solaris 10 End of Life
Solaris 10 end of life Continue Oracle Solaris 10 has had an amazing OS update, including ground features such as zones (Solaris containers), FSS, Services, Dynamic Tracking (against live production operating systems without impact), and logical domains. These features have been imitated in the market (imitation is the best form of flattery!) like all good things, they have to come to an end. Sun Microsystems was acquired by Oracle and eventually, the largest OS known to the industry, needs to be updated. Oracle has set a retirement date of January 2021. Oracle indicated that Solaris 10 systems would need to raise support costs. Oracle has never provided migratory tools to facilitate migration from Solaris 10 to Solaris 11, so migration to Solaris has been slow. In September 2019, Oracle decided that extended support for Solaris 10 without an additional financial penalty would be delayed until 2024! Well its March 1 is just a reminder that Oracle Solaris 10 is getting the end of life regarding support if you accept extended support from Oracle. Combined with the fact gdpR should take effect on May 25, 2018 you want to make sure that you are either upgraded to Solaris 11.3 or have taken extended support to obtain any patches for security issues. For more information on tanningix releases and support dates of old and new follow this link ×Sestive to abort the Unix Error Operating System originally developed by Sun Microsystems SolarisDeveloperSun Microsystems (acquired by Oracle Corporation in 2009)Written inC, C'OSUnixWorking StateCurrentSource ModelMixedInitial release1992; 28 years ago (1992-06)Last release11.4 / August 28, 2018; 2 years ago (2018-08-28)Marketing targetServer, PlatformsCurrent: SPARC, x86-64 Former: IA-32, PowerPCKernel typeMonolithic with dynamically downloadable modulesDefault user interface GNOME-2-LicenseVariousOfficial websitewww.oracle.com/solaris Solaris is the own operating system Of Unix, originally developed by Sunsystems. -

Oracle Solaris 10 910 Release Notes
Oracle® Solaris 10 9/10 Release Notes Part No: 821–1839–11 September 2010 Copyright © 2010, Oracle and/or its affiliates. All rights reserved. This software and related documentation are provided under a license agreement containing restrictions on use and disclosure and are protected by intellectual property laws. Except as expressly permitted in your license agreement or allowed by law, you may not use, copy, reproduce, translate, broadcast, modify, license, transmit, distribute, exhibit, perform, publish, or display any part, in any form, or by any means. Reverse engineering, disassembly, or decompilation of this software, unless required by law for interoperability, is prohibited. The information contained herein is subject to change without notice and is not warranted to be error-free. If you find any errors, please report them to us in writing. If this is software or related software documentation that is delivered to the U.S. Government or anyone licensing it on behalf of the U.S. Government, the following notice is applicable: U.S. GOVERNMENT RIGHTS Programs, software, databases, and related documentation and technical data delivered to U.S. Government customers are “commercial computer software” or “commercial technical data” pursuant to the applicable Federal Acquisition Regulation and agency-specific supplemental regulations. As such, the use, duplication, disclosure, modification, and adaptation shall be subject to the restrictions and license terms setforth in the applicable Government contract, and, to the extent applicable by the terms of the Government contract, the additional rights set forth in FAR 52.227-19, Commercial Computer Software License (December 2007). Oracle America, Inc., 500 Oracle Parkway, Redwood City, CA 94065. -

Sun Java Workstation W1100z and W2100z Getting Started Guide • October 2004
Sun Java™ Workstation W1100z and W2100z Getting Started Guide Sun Microsystems, Inc. www.sun.com Part No. 817-6584-11 October 2004, Revision A Submit comments about this document at: http://www.sun.com/hwdocs/feedback Copyright 2004 Sun Microsystems, Inc., 4150 Network Circle, Santa Clara, California 95054, U.S.A. All rights reserved. Sun Microsystems, Inc. has intellectual property rights relating to technology that is described in this document. In particular, and without limitation, these intellectual property rights may include one or more of the U.S. patents listed at http://www.sun.com/patents and one or more additional patents or pending patent applications in the U.S. and in other countries. This document and the product to which it pertains are distributed under licenses restricting their use, copying, distribution, and decompilation. No part of the product or of this document may be reproduced in any form by any means without prior written authorization of Sun and its licensors, if any. Third-party software, including font technology, is copyrighted and licensed from Sun suppliers. Parts of the product may be derived from Berkeley BSD systems, licensed from the University of California. UNIX is a registered trademark in the U.S. and in other countries, exclusively licensed through X/Open Company, Ltd. Sun, Sun Microsystems, the Sun logo, AnswerBook2, docs.sun.com, Java, and Solaris are trademarks or registered trademarks of Sun Microsystems, Inc. in the U.S. and in other countries. All SPARC trademarks are used under license and are trademarks or registered trademarks of SPARC International, Inc. -

Opensolaris Presentation
Open source for the enterprise Marco Colombo Sun Microsystems Italia S.p.A. What is Open Source? Distribute binaries + source code Open Source and/or Free software license Freely: modifiable, redistributable, forkable Non-discriminatory Consensus driven projects Meritocracy Peer review and public discussion OK to make money - but not for access to code 2 OpenSolaris: Open Source for the Enterprise | Marco Colombo – Sun Microsystems Italia Why Open Source? Good For Customers Good For Sun & Partners Community drives choice, Innovation happens competition, value everywhere Accelerates unexpected, Creates new opportunities by disruptive innovation growing the market 3 OpenSolaris: Open Source for the Enterprise | Marco Colombo – Sun Microsystems Italia Community Participation 4 CopyrightOpenSolaris: © 2004 SomersetOpen Source Historical for Centerthe Enterprise | Marco Colombo – Sun Microsystems Italia Sun: A History of Community J2EE, J2ME NFS Jini UNIX SVR4 XML Sun 1 with TCP/IP 1980 1990 2000 2005 5 OpenSolaris: Open Source for the Enterprise | Marco Colombo – Sun Microsystems Italia Benefit Of Open Communities Shared vision, goals Access to Technology Open Agreed sharing and Ideas Development (license) Agreed relationships Open Communities (governance) Committed members Broad Inclusive Participation Process It’s About Both People and Technologies 6 OpenSolaris: Open Source for the Enterprise | Marco Colombo – Sun Microsystems Italia Expect the Unexpected Bright, well-known people contribute code regularly Community finds new uses Jini™ -

Oracle Solaris 10 113 Release Notes
Oracle® Solaris 10 1/13 Release Notes Part No: E29493–01 January 2013 Copyright © 2013, Oracle and/or its affiliates. All rights reserved. This software and related documentation are provided under a license agreement containing restrictions on use and disclosure and are protected by intellectual property laws. Except as expressly permitted in your license agreement or allowed by law, you may not use, copy, reproduce, translate, broadcast, modify, license, transmit, distribute, exhibit, perform, publish, or display any part, in any form, or by any means. Reverse engineering, disassembly, or decompilation of this software, unless required by law for interoperability, is prohibited. The information contained herein is subject to change without notice and is not warranted to be error-free. If you find any errors, please report them to us in writing. If this is software or related documentation that is delivered to the U.S. Government or anyone licensing it on behalf of the U.S. Government, the following notice is applicable: U.S. GOVERNMENT END USERS. Oracle programs, including any operating system, integrated software, any programs installed on the hardware, and/or documentation, delivered to U.S. Government end users are "commercial computer software" pursuant to the applicable Federal Acquisition Regulation and agency-specific supplemental regulations. As such, use, duplication, disclosure, modification, and adaptation of the programs, including anyoperating system, integrated software, any programs installed on the hardware, and/or documentation, shall be subject to license terms and license restrictions applicable to the programs. No other rights are granted to the U.S. Government. This software or hardware is developed for general use in a variety of information management applications. -
Sun Java Workstation W1100z and W2100z Release Notes
Sun Java™ Workstation W1100z and W2100z Release Notes Sun Microsystems, Inc. www.sun.com Part No. 817-6587-19 October 2005, Revision A Submit comments about this document at: http://www.sun.com/hwdocs/feedback Copyright 2005 Sun Microsystems, Inc., 4150 Network Circle, Santa Clara, California 95054, U.S.A. All rights reserved. Sun Microsystems, Inc. has intellectual property rights relating to technology that is described in this document. In particular, and without limitation, these intellectual property rights may include one or more of the U.S. patents listed at http://www.sun.com/patents and one or more additional patents or pending patent applications in the U.S. and in other countries. This document and the product to which it pertains are distributed under licenses restricting their use, copying, distribution, and decompilation. No part of the product or of this document may be reproduced in any form by any means without prior written authorization of Sun and its licensors, if any. Third-party software, including font technology, is copyrighted and licensed from Sun suppliers. Parts of the product may be derived from Berkeley BSD systems, licensed from the University of California. UNIX is a registered trademark in the U.S. and in other countries, exclusively licensed through X/Open Company, Ltd. Sun, Sun Microsystems, the Sun logo, AnswerBook2, docs.sun.com, Java, and Solaris are trademarks or registered trademarks of Sun Microsystems, Inc. in the U.S. and in other countries. All SPARC trademarks are used under license and are trademarks or registered trademarks of SPARC International, Inc. in the U.S. -
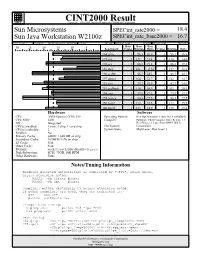
Sun Microsystems: Sun Java Workstation W2100z
CINT2000 Result spec Copyright 1999-2004, Standard Performance Evaluation Corporation Sun Microsystems SPECint_rate2000 = 18.4 Sun Java Workstation W2100z SPECint_rate_base2000 = 16.7 SPEC license #: 6 Tested by: Sun Microsystems, Santa Clara Test date: Jun-2004 Hardware Avail: Jul-2004 Software Avail: May-2004 Base Base Base 30 25 20 15 10 5 Benchmark Copies Runtime Ratio Copies Runtime Ratio 164.gzip 1 96.3 16.9 1 96.1 16.9 175.vpr 1 121 13.4 1 116 14.0 176.gcc 1 66.3 19.2 1 66.3 19.2 181.mcf 1 251 8.32 1 159 13.1 186.crafty 1 48.1 24.1 1 48.1 24.1 197.parser 1 164 12.7 1 142 14.7 252.eon 1 75.7 19.9 1 62.7 24.0 253.perlbmk 1 110 18.9 1 102 20.5 254.gap 1 73.9 17.3 1 73.9 17.3 255.vortex 1 80.3 27.5 1 80.3 27.5 256.bzip2 1 112 15.5 1 112 15.5 300.twolf 1 233 14.9 1 179 19.4 Hardware Software CPU: AMD Opteron (TM) 250 Operating System: Red Hat Enterprise Linux WS 3 (AMD64) CPU MHz: 2400 Compiler: PathScale EKO Compiler Suite, Release 1.1 FPU: Integrated Red Hat gcc 3.5 ssa (from RHEL WS 3) CPU(s) enabled: 1 core, 1 chip, 1 core/chip File System: Linux/ext3 CPU(s) orderable: 2 System State: Multi-user, Run level 3 Parallel: No Primary Cache: 64KBI + 64KBD on chip Secondary Cache: 1024KB (I+D) on chip L3 Cache: N/A Other Cache: N/A Memory: 4x1GB, PC3200 CL3 DDR SDRAM ECC Registered Disk Subsystem: SCSI, 73GB, 10K RPM Other Hardware: None Notes/Tuning Information Feedback-directed optimization is indicated by "+FDO", which means, unless otherwise noted: PASS1: -fb_create fbdata PASS2: -fb_opt fbdata Compiler: pathcc (PathScale C) unless otherwise noted. -

IMAGE PROCESSING Mini Manual
0 NASA Technical Memorandum 107680 IMAGE PROCESSING Mini Manual 13 June 1992 NASA Central Scientific - National Aeronautics and Space Administration Computing Complex Langley Research Center 0 Hampton,Virginia 23665-5225 Document A19 NASA Langley Research Center Central Scientific Computing Complex Document A-9 IMAGE PROCESSING MINI MANUAL FOR THE ANALYSIS AND COMPUTATION DIVISION'S DATA VISUALIZATION AND ANIMATION LABORATORY June 1992 Christine G. Matthews Mary-Anne Posenau Desiree M. Leonard Elizabeth L. Avis Kelly R. Debure Kathryn Stacy Bill von Ofenheim Table of Contents Page ... GLOSSARY ...........................................................................................................III 1. INTRODUCTION ................................................................................................1 2 . DATA VISUALIZATION AND ANIMATION LAB (DVAL) OVERVIEW .............2 3 . GElTlNG STARTED IN THE DVAL ..................................................................5 4 . HANDLING IMAGE DATA .................................................................................7 4.1 Dlgital Data ...........................................................................................7 4.1.1 Supported format ................................................................... 7 4.1.2 Conversion software.............................................................. 7 4.1.3 Tape facilities ..........................................................................8 4.1.4 File transfers ...........................................................................8 -

Health Care World >> PMS Catalogue
HBOC Apr 26,1996 XL 071-960287.1 Health care world >> PMS catalogue MR CT Xray RAD US GE GE vasc dig. dig. MR MR CT Xray RAD US Siemens Philips Philips R/F film video MR endosc. cardio video US cardio MR/CT enhance Xray • Application cardio Xray models enhance monitor cardio • protocols Xray surgery CIS • services Surgery • data dictionaries Guide CCW view • network statistic analysis infrastructure Care Vue spread • interface adapters sheet cine view DTP cardio analysis speech recog Sh. term storage Archive Lab IS Report demo image HIS teach tele view man. PMS-ICS-workstations 1 of 23 HBOC Apr 26,1996 XL 071-960287.1 EasyVision family of products Examination rooms R/F Vascular print export view print store phase 1: 1992 clinical focus Examination rooms phase 3: 1996 MR CT research archive export print store MPR MPR phase 2: 1994 PMS-ICS-workstations 2 of 23 HBOC Apr 26,1996 XL 071-960287.1 Product types: • Modality productivity enhancers: + Easyvision R/F + Easyvision RAD + Easyvision CT/MR street price ca 50 k$, high added clinical value; sales directly related to modality sales • Clinical Focus: + Neurovision + Image Guided Surgery street price ca 100 k$, very high added clinical value; sales limited to specialist areas • “PACS” workstations + Teleradiology Workstation + Critical Care Workstation + Multi modality review station street price ca 25 k$, low added value, low margin; sales potentially very high PMS-ICS-workstations 3 of 23 HBOC Apr 26,1996 XL 071-960287.1 Simplified layers applications services and common appl toolboxes CDSpack HW + OS PMS-ICS-workstations 4 of 23 HBOC Apr 26,1996 XL 071-960287.1 september 1991 View, test vehicle only image gfx UI DB SunOS, SunView Standard Sun workstation PMS-ICS-workstations 5 of 23 HBOC Apr 26,1996 XL 071-960287.1 september 1992 R/F application dev. -
Solaris X Window System Reference Manual
Solaris X Window System Reference Manual Sun Microsystems, Inc. 2550 Garcia Avenue Mountain View, CA 94043 U.S.A. 1995 Sun Microsystems, Inc., 2550 Garcia Avenue, Mountain View, California 94043-1100 USA. All rights reserved. This product or document is protected by copyright and distributed under licenses restricting its use, copying, distribution and decompilation. No part of this product or document may be reproduced in any form by any means without prior written authorization of Sun and its licensors, if any. Portions of this product may be derived from the UNIX system, licensed from UNIX System Laboratories, Inc., a wholly owned subsidiary of Novell, Inc., and from the Berkeley 4.3 BSD system, licensed from the University of California. Third- party software, including font technology in this product, is protected by copyright and licensed from Sun's Suppliers. RESTRICTED RIGHTS LEGEND: Use, duplication, or disclosure by the government is subject to restrictions as set forth in subparagraph (c)(1)(ii) of the Rights in Technical Data and Computer Software clause at DFARS 252.227-7013 and FAR 52.227-19. The product described in this manual may be protected by one or more U.S. patents, foreign patents, or pending applications. TRADEMARKS Sun, Sun Microsystems, the Sun logo, SunSoft, the SunSoft logo, Solaris, SunOS, OpenWindows, DeskSet, ONC, ONC+, and NFS are trademarks or registered trademarks of Sun Microsystems, Inc. in the United States and other countries. UNIX is a registered trademark in the United States and other countries, exclusively licensed through X/Open Company, Ltd. OPEN LOOK is a registered trademark of Novell, Inc. -

Solaris X86 FAQ
Solaris x86 FAQ Dan E. Anderson Solaris x86 FAQ Table of Contents r r r r Solaris x86 FAQr r...................................................................................................................................1 r r r Detailed Contentsr r..........................................................................................................................2 r r r r Solaris x86 FAQr r...............................................................................................................................116 r r r Detailed Contentsr r......................................................................................................................117 i r r r r r Solaris x86 FAQr r r r r r r r ENGLISH r r r / r r r r [IPv6-only r r r r r r r / r Japaneser mirrorr RUSSIANr r r (below)rr [Translation]r [Another FAQ]r of this FAQ]r r r r r r r Search Solaris x86 FAQ:r r r r r r r r r r r r r r r r r r r r 9. Interoperability With Other r r r r r Operating Systemsr r r r r r r r r r r r 2. Introductionr r r r r r r r r Complete FAQ:r r r r r r r 3. Resourcesr r r r r r r r r r r 4. Pre-installationr r r r r r ♦ HTML Formatr r r r r r 5. Installationr r r r r ♦ Plain Text Formatr r ♦ Gzip-compressed Text r r r r r 6. Post-installation (Customization)r Formatr ♦ Translation:r r r r r r r r r r 7. Troubleshootingr r r r r r RUSSKAYA / RUSSIAN r r r r Versionr by Dubna r r r r r 8. X Windowsr International Universityr (Version 2.4, 10/1999)r r r r r r r r r r r r Solaris x86 FAQr r 1 Solaris x86 FAQ r r r r r r r Detailed Contentsr r r r r r Read the FAQ as an ebook.r r Upload Palm DOC, Plucker, Text,r r PDF & HTML formats.r r See "Ebook formats" for links.r r r r r r r r r NEXT -> r r r r r r r r r r r r r r r r r r r r r r r r r This web page is not associated with Sun Microsystems.r Copyright © 1997-2010 Dan Anderson.