Electronic Circuits [Cir]
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Electric Circuit • Basic Laws – Ohm’S Law – Kirchhoff's Voltage Law – Kirchhoff's Current Law • Power and Energy
Basic Definitions & Basic Laws Dr. Mohamed Refky Amin Electronics and Electrical Communications Engineering Department (EECE) Cairo University [email protected] http://scholar.cu.edu.eg/refky/ Outline of this Lecture • Course Contents, References, Course Plan • Basic Definitions • Topology of Electric Circuit • Basic Laws – Ohm’s Law – Kirchhoff's Voltage Law – Kirchhoff's Current Law • Power and Energy Dr. Mohamed Refky 2 References • Textbook: – “Fundamentals of Electric Circuits”, Alexander and Sadiku, 5th edition • References: – J. W. Nilsson and S. Riedel, Electric Circuits. 8th Edition, Prentice Hall, 2008. – Syed A. Nasar, “Electric Circuits,” Schaum’s Solved Problems Series, Mcgraw-Hill, New York, 1988. – Cunningham Stuller, “Circuit Analysis,” John Wiley & Sons Inc., New York, 1995. Dr. Mohamed Refky 3 Course Plan • Instructor: Prof. Mohamed Fathy Dr. Mohamed Refky • TA: TBA • Grading: – 40% Activity • Quizzers • Assignments • Attendance – 20 % Midterm – 40% Final Exam • Office Hours: TBA Dr. Mohamed Refky 4 Course Contents Week Topic 1 Basic Definitions & Basic Laws 2 3 Methods of solution of DC circuits 4 8 Network Theorems 6 Midterm 7 Introduction to Capacitors and Inductors 8 Sinusoids and phasors 9 10 Sinusoidal steady state analysis 11 12 Three Phase Circuits Dr. Mohamed Refky 5 Introduction Importance of this Course For an electrical engineering student, basic electric circuit theory is an essential to understand several other courses. Many branches of electrical engineering, such as power, electric machines, electronics, and instrumentation, are based on electric circuit theory. Dr. Mohamed Refky 6 Outline of this Lecture • Course Contents, References, Course Plan • Basic Definitions • Topology of Electric Circuit • Basic Laws – Ohm’s Law – Kirchhoff's Voltage Law – Kirchhoff's Current Law • Power and Energy Dr. -

Introduction to Electrical and Computer Engineering International
Introduction to Electrical and Computer Engineering Basic Circuits and Simulation Electrical & Computer Engineering Basic Circuits and Simulation (1 of 22) International System of Units (SI) • Length: meter (m) • SI Prefixes (power of 10) • Mass: kilogram (kg) – 1012 Tera (T) • Time: second (s) – 109 Giga (G) – 106 Mega (M) • Current: Ampere (A) – 103 kilo (k) • Voltage: Volt (V) – 10-3 milli (m) • Temperature: Degrees – 10-6 micro (µ) Kelvin (ºK) – 10-9 nano (n) – 10-12 pico (p) Electrical & Computer Engineering Basic Circuits and Simulation (2 of 22) 1 SI Examples • A few examples: • 1 Gbit = 109 bits, or 103106 bits, or one thousand million bits – 10-5 s = 0.00001 s; use closest SI prefix • 1×10-5 s = 10 × 10-6 s or 10 μs or • 1×10-5 s = 0.01 × 10-3 s or 0.01 ms Electrical & Computer Engineering Basic Circuits and Simulation (3 of 22) Typical Ranges Voltage (V) Current (A) • 10-8 Antenna of radio • 10-12 Nerve cell in brain receiver (10 nV) • 10-7 Integrated circuit • 10-3 EKG – voltage memory cell (0.1 µA) produced by heart • 10×10-3 Threshold of • 1.5 Flashlight battery sensation in humans • 12 Car battery • 100×10-3 Fatal to humans • 110 House wiring (US) • 1-2 Typical Household • 220 House wiring (Europe) appliance • 107 Lightning bolt (10 MV) • 103 Large industrial appliance • 104 Lightning bolt Electrical & Computer Engineering Basic Circuits and Simulation (4 of 22) 2 Electrical Quantities • Electric Charge (positive or negative) – (Coulombs, C) - q – Electron: 1.602 x 10 • Current (Ampere or Amp, A) – i or I – Rate of charge flow, – 1 1 Electrical & Computer Engineering Basic Circuits and Simulation (5 of 22) Electrical Quantities (continued) • Voltage (Volts, V) – w=energy required to move a given charge between two points (Joule, J) – – 1 1 1 Joule is the work done by a constant 1 N force applied through a 1 m distance. -
Chapter 6 Inductance, Capacitance, and Mutual Inductance
Chapter 6 Inductance, Capacitance, and Mutual Inductance 6.1 The inductor 6.2 The capacitor 6.3 Series-parallel combinations of inductance and capacitance 6.4 Mutual inductance 6.5 Closer look at mutual inductance 1 Overview In addition to voltage sources, current sources, resistors, here we will discuss the remaining 2 types of basic elements: inductors, capacitors. Inductors and capacitors cannot generate nor dissipate but store energy. Their current-voltage (i-v) relations involve with integral and derivative of time, thus more complicated than resistors. 2 Key points di Why the i-v relation of an inductor isv L ? dt dv Why the i-v relation of a capacitor isi C ? dt Why the energies stored in an inductor and a capacitor are: 1 1 w Li, 2 , 2 Cv respectively? 2 2 3 Section 6.1 The Inductor 1. Physics 2. i-v relation and behaviors 3. Power and energy 4 Fundamentals An inductor of inductance L is symbolized by a solenoidal coil. Typical inductance L ranges from 10 H to 10 mH. The i-v relation of an inductor (under the passive sign convention) is: di v L , dt 5 Physics of self-inductance (1) Consider an N1 -turn coil C1 carrying current I1 . The resulting magnetic fieldB 1() r 1 N 1(Biot- I will pass through Savart law) C1 itself, causing a flux linkage 1 , where B1() r 1 N 1 , 1 B1 r1() d s1 P 1, 1 N I S 1 P1 is the permeance. 2 1 PNI 1 11. 6 Physics of self-inductance (2) The ratio of flux linkage to the driving current is defined as the self inductance of the loop: 1 2 L1NP 1 1, I1 which describes how easy a coil current can introduce magnetic flux over the coil itself. -

Chapter 2: Circuit Elements
Chapter 2: Circuit Elements Objectives o Understand concept of basic circuit elements . Resistor, voltage source, current source, capacitor, inductor o Learn to apply KVL, KCL, Ohm’s Law . Sign conventions Homework/Quiz/Exam Prep o When do we have enough equations? o Math requirements . Simultaneous linear algebraic equations Presentation o Ideal Basic Circuit Elements . Sources: Dependent and Independent . R, L, C o Resistors . Ohm’s Law . Power o Flashlight Circuit . KVL, KCL, Ohm . KVL shortcut o Special Cases . Short circuit; Open circuit . What happens to resistors that are shorted/opened? Activity: worksheet on KVL, KCL, Ohm Activity: sample problems Chapter 2: Circuit Elements There are five Ideal Basic Circuit Elements. We listed these in the previous chapter; we discuss them further here. The Ideal Basic Circuit Elements are as follows. Voltage source Current source Resistor Capacitor Inductor These circuit elements are used to model electrical systems, as we discussed in Chapter 1. They are available in the laboratory, but the ones in the lab are not “ideal”; they are “real”. When we draw circuit models on the board or in quizzes and exams, we assume that ideal elements are intended, unless otherwise stated. To solve circuits involving capacitors and inductors, we require differential equations. Therefore we will postpone these circuit elements until later in the course and deal for the moment with sources and resistors only. 2.1 Sources Source: a device capable of conversion between non-electrical energy and electrical energy. Examples… Generator: mechanical electrical Motor: electrical mechanical Important: energy and power can be either delivered or absorbed, depending on the circuit element and how it is connected into the circuit. -
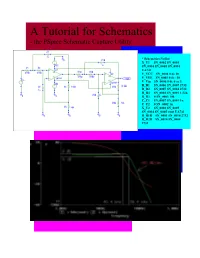
A Visual Tutorial for Schematics
A Tutorial for Schematics - the PSpice Schematic Capture Utility * Schematics Netlist X_U1 $N_0002 $N_0003 $N_0004 $N_0005 $N_0001 UA741 V_VCC $N_0004 0 dc 10 V_VEE $N_0005 0 dc -10 V_Vin $N_0006 0 dc 0 ac 1 R_R1 $N_0006 $N_0007 2732 R_R2 $N_0007 $N_0002 2732 R_R4 $N_0003 $N_0001 1.52k R_R3 0 $N_0003 10k C_C1 $N_0007 $N_0001 1n C_C2 0 $N_0002 1n X_U2 $N_0008 $N_0009 $N_0004 $N_0005 vout UA741 R_R1B $N_0001 $N_0010 2732 R_R2B $N_0010 $N_0008 2732 Outline/Contents PART I. PSPICE FUNDAMENTALS I. Introductory Remarks ……………………………………………………………… 3 A. Spice, PSpice and Schematics B. Font Conventions C. The Passive Sign Convention and PSpice II. What is Schematics and what can it do for you? ………………………………….... 4 III. Units and Unit Prefixes ………………………………………………………..…… 4 PART II. CONSTRUCTING AND SIMULATING A DC CIRCUIT I. Drawing Circuit Diagrams with Schematics …………………………………….….. 5 A. Getting Parts …………………………………………………………………….. 6 B. Changing a Part’s Name and Attributes ………………………………………… 7 C. Arranging Parts and Pin Numbers ………………………………………………. 8 D. Wiring Parts ……………………………………………………………………... 8 E. The Analog Ground ………………………………………………………………9 F. Saving Schematics ………………………………………………………………. 9 II. Getting Results ………………………....………………………………………..….. 10 A. The Netlist, Arrgh! B. Naming Nodes …………………………………………………………………. 10 C. Displaying Results on the Schematic ………………………………………….. 11 D. Printing your Drawing …………………………………………………………. 11 III. Running PSpice from Schematics and Choosing an Analysis Type ……………….. 13 A. Obtaining a Bias Point Detail ……………………………………………… 14 B. Obtaining a dc Sweep ……………..………………….…………………… 15 IV. Running and Using PROBE ……………………………………………………….. 16 A. Adding Traces B. Using Markers C. Other PROBE Features - Label, Cursor, Copying and Saving ……………….. 19 V. Printing your Drawing. ……………………………..……………………………… 12 VI. Your First Schematic ………………………………………………………………. 20 PART III. CONSTRUCTING AND SIMULATING AN AC CIRCUIT I. Obtaining an ac Analysis and making Bode Plots …………………………………. -

Introducing Circuit Analysis
Chapter 1 Introducing Circuit Analysis In This Chapter ▶ Understanding current and voltage ▶ Applying laws when you connect circuit devices ▶ Analyzing circuits with algebra and calculus ▶ Taking some mathematical shortcuts ircuit analysis is like the psychoanalysis of the electrical engineering Cworld because it’s all about studying the behavior of circuits. With any circuit, you have an input signal, such as a battery source or an audio signal. What you want to figure out is the circuit’s output — how the circuit responds to a given input. A circuit’s output is either a voltage or a current. You have to analyze the voltages and currents traveling through each element or component in the circuit in order to determine the output, although many times you don’t have to find every voltage and every current within the circuit. Circuit analysis is challenging because it integrates a variety of topics from your math and physics courses in addition to introducing techniques specific to determining circuit behavior. This chapter gives you an overview of cir- cuit analysis and some of the key concepts you need to know before you can begin understanding circuits. COPYRIGHTED MATERIAL Getting Started with Current and Voltage Being able to analyze circuits requires having a solid understanding of how voltage and current interact within a circuit. Chapter 2 gives you insight into how voltage and current behave in the types of devices normally found in circuits, such as resistors and batteries. That chapter also presents the basic features of circuit diagrams, or schematics. 05_9781118493120-ch01.indd 7 September 1, 2016 2:58 PM 8 Part I: Getting Started with Circuit Analysis The following sections introduce you to current and voltage as well as a direction-based convention that’s guaranteed to come in handy in circuit analysis. -

332:221 Principles of Electrical Engineering I Radiator Cooling System a Simple Electric Circuit
332:221 Principles of Electrical Engineering I Radiator Cooling System A simple Electric Circuit Radiator Cooling System: Consider A simple circuit: Consider the compo- the components, nents, 1. Water pump 1. Battery 2. Hoses 2. Wires 3. Engine + Radiator. 3. Radio. These components are interconnected to These components are interconnected to form a closed path (circuit). form a closed path (circuit). Hose Wire Source- Load Source- Load 6 6 ? Engine + ? Pump S B BatteryS B Radio Radiator 6 6 ? ? Hose Wire Pump exerts pressure or force on water. Battery exerts pressure or force on electric charge. Water circulates around the closed path. Electric charge circulates around the closed path. What does the rate of flow of water (water What does the rate of flow of charge current) depend on? (called current) depend on? What are the variables of circuit (closed What are the variables of circuit (closed path)? path)? 1. Force 1. Electric Force (Voltage source) 2. Water current 2. current 3. Power 3. Power 4. Work done (Energy) 4. Work done (Energy) Each component has a pressure difference Each component has an electrical potential between its ends or terminals. difference (voltage) across its terminals. Each component has a current of water Each component has a current (current of through it. charge) through it. Each component either generates or con- Each component either generates or con- sumes power sumes power Which component generates power? Which component generates power? Which component consumess power? Which component consumess power? 332:221 Principles of Electrical Engineering I Preview – Circuit Variables and Components Analogy: When you start reading a novel, until you understand the characters involved and their nature, the theme of the story is not clear. -

Capacitors and Inductors ENGR 40M Lecture Notes — July 21, 2017 Chuan-Zheng Lee, Stanford University
Capacitors and inductors ENGR 40M lecture notes | July 21, 2017 Chuan-Zheng Lee, Stanford University Unlike the components we've studied so far, in capacitors and inductors, the relationship between current and voltage doesn't depend only on the present. Capacitors and inductors store electrical energy|capacitors in an electric field, inductors in a magnetic field. This enables a wealth of new applications, which we'll see in coming weeks. Quick reference Capacitor Inductor Symbol Stores energy in electric field magnetic field Value of component capacitance, C inductance, L (unit) (farad, F) (henry, H) dv di I{V relationship i = C v = L dt dt At steady state, looks like open circuit short circuit General behavior In order to describe the voltage{current relationship in capacitors and inductors, we need to think of voltage and current as functions of time, which we might denote v(t) and i(t). It is common to omit (t) part, so v and i are implicitly understood to be functions of time. The voltage v across and current i through a capacitor with capacitance C are related by the equation C dv i i = C ; dt + − v dv 1 where dt is the rate of change of voltage with respect to time. From this, we can see that an sudden change in the voltage across a capacitor|however minute|would require infinite current. This isn't physically possible, so a capacitor's voltage can't change instantaneously. More generally, capacitors oppose changes in voltage|they tend to \want" their voltage to change \slowly". Similarly, in an inductor with inductance L, L di i v = L : dt + v − An inductor's current can't change instantaneously, and inductors oppose changes in current. -
Notes on Electric Circuits from Dr. Srivastava
Notes on Electric Circuits (Dr. Ramakant Srivastava) Passive Sign Convention (PSC) Passive sign convention deals with the designation of the polarity of the voltage and the direction of the current arrow in an element or a sub-circuit. The convention is satisfied when the current arrow is towards the terminal marked positive. The values of the voltage v and current i are irrelevant. For example, in Figure 1.1, PSC is satisfied for element B but not for element A. i V AB V Figure 1.1: Passive sign convention (PSC) Example 1.1 Consider the four equivalent circuits shown in Figure 1.2. Of the four, only the designations in (a) and (d) obey the convention and others do not. A AAA 2A -2A 2A -2A DC DC 10V DC 10V DC -10V -10V B B B B (a) (b) (c) (d) Figure 1.2: Equivalent representations of the same circuit Exercise 1.1 Identify the sources in Figure 1.3 obeying the passive sign convention. - + V0 i0 i 1 - + 1A DC 10V V 2i V 10V 2 0 1 0 - + i2 Figure 1.3: Identification of elements obeying the passive sign convention Answer: The 1-A source and the dependent voltage source. Notice, we need not know the values of v2, v0 or i1 to answer the question. Power If the voltage and current in an element (sub-circuit) satisfy PSC, then their product gives the value of the power absorbed by the element (sub-circuit). For example, in the circuit shown in Figure 1.1, p = vi is the power absorbed by the element B. -
Voltage/Current Sources & Source Transformations
ELL 100 - Introduction to Electrical Engineering LECTURE 3: ANALYSIS OF DC CIRCUITS VOLTAGE/CURRENT SOURCES & SOURCE TRANSFORMATIONS Outline Introduction Voltage and Current Sources Passive Sign Convention Series and Parallel Connection of Sources Node, Branches and Loops Series and Parallel Elements Source Transformation Exercise/Numerical Analysis Unsolved Problems References 2 INTRODUCTION Electrical Circuits seem to be everywhere! 3 INTRODUCTION Analysis of Circuits implies: • Finding voltage across any element of the circuit. • Finding current through any element of the circuit. 4 INTRODUCTION Analysis of Circuits Modern trains are powered by electric Knowledge of circuit analysis enable oneself to motors. Their electrical systems are best use circuit simulator developed for students to analyzed using AC or phasor analysis learn analog, digital, and power electronics. techniques. 5 INTRODUCTION Circuit representation of a Physical Transformer Knowledge of circuit analysis helps to analyse any electrical device with their equivalent circuit representation. 6 INTRODUCTION DC Shunt Motor Lf Ra Circuit representation of a DC Shunt Motor Vdc A Rf AA 7 INTRODUCTION iPad Charger with internal Circuitry Internal Circuitry 8 INTRODUCTION Single Phase Inverter Internal Circuitry AC Load IAC IDC t t 9 INTRODUCTION Single phase diode bridge rectifier Equivalent Circuit 10 INTRODUCTION DC-DC step down converter Equivalent Circuit Regulated DC Output 11 INTRODUCTION Lighting System Parallel Connection Break in wire 220 or 110 volt AC Supply Rest of the bulbs are ON except the parallel path with break in circuit. 12 INTRODUCTION Lighting System Series Connection 220 or 110 volt Break AC Supply in wire Rest of the bulbs are OFF after breaking point. Correct? 13 INTRODUCTION Lighting System Series Connection 220 or 110 volt Break AC Supply in wire X No! TheseRest 2 bulbsof the will bulbs also be are OFF. -
Circuit Simulator User Manual
Circuit Simulator User Manual Table Of Contents Installation 1 Interface 2 Adding/Moving Elements 4 Simulation 5 Oscilloscope 6 Pre-built Circuits 9 Part 1: Interface Simulator A B C D E F G H I A. Pause / resume simulation B. Reset simulation C. Create new scope window D. Adjust simulation speed E. Adjust current speed F. Adjust power brightness G. Name of currently loaded circuit H. Instantaneous values of selected element I. Circuit board 1 Oscilloscope A B C A. Displayed elements (selected element in bold) B. Waveforms C. Instantaneous values of selected element 2 Part 2: Adding / Moving Elements Adding Elements To add an element, right click on the circuit board. The following menu will appear. To add an element to the circuit, select the desired element from one of the submenus, then click and drag on the circuit board to place the element. When drawing, elements snap to the grid shown on the circuit board. For a smaller grid, check the Small Grid option in the Options menu. Available Elements: Passive Capacitor SPDT Switch Transmission Line Components Inductor Potentiometer Relay Switch Transformer Memristor Push Switch Tapped Transformer Spark Gap Inputs / Outputs Ground Analog Output Antenna Voltage Source Logic Input/Output Current Source A/C Source Clock LED Square Wave A/C Sweep Lamp Active Components Diode MOSFET Tunnel Diode Zener Diode JFET Triode Bipolar Transistor Analog Switch CCII Op Amp SCR Logic Gates Inverter NOR OR NAND AND XOR Chips D Flip Flop Phase Comparator DAC JK Flip Flop Counter ADC 7 Segment LED Decade Counter Latch VCO 555 Timer 3 Note: Some elements (such as resistors, capacitors, and inductors) are displayed with +/- icons next to them. -
1.3 Circuit Analysis: an Overview 1.4 Voltage and Current 1.5 the Ideal Basic Circuit Element 1.6 Power and Energy
Chapter 1 Circuit Variables 1.1 Electrical Engineering: An Overview 1.2 The International System of Units 1.3 Circuit Analysis: An Overview 1.4 Voltage and Current 1.5 The Ideal Basic Circuit Element 1.6 Power and Energy 1 Key points What is the lumped-parameter assumption upon which all the circuit analysis methods introduced in this course are founded? What is the passive sign convention that is used in unambiguously defining the sign of each formula in circuit analysis? 2 Section 1.1 Electrical Engineering: An Overview 1. Electric circuits 2. Lumped-parameter assumption 3 What is an electric circuit? A mathematical model that approximates the behavior of an actual electrical system. 4 Example: Electric Circuit of a Flash Lamp (1) Physics: Filament is heated to a temperature high enough to radiate the visible light. Modeling: a resistor Rl (only accounts for conversion of electric energy to thermal energy, not light energy). Metal strip Physics: Conductive connection. Modeling: a resistor Rc Coiled connector Physics: Conductive connection. Modeling: a resistor R1 5 Example: Electric Circuit of a Flash Lamp (2) Only electric behavior is accounted: lamp, coiled connector, vs metal strip are modeled by the same element (resistor). Modeling requires approximations: ignore internal dissipation of the dry cells. 6 What is the circuit theory? A simplified version of electromagnetic field theory, which is accurate under low frequency condition. 7 What is the electromagnetic theory? Electric charge electric field. Electric current (moving charge) magnetic field. Time-varying fields electromagnetic wave with properties of propagation, reflection, … E.g. 8 Lumped-parameter assumption If the circuit size is < /10 (= c/f ), electrical effects are supposed to reach every corner of the circuit instantaneously.