Supersonic Thin Airfoil Theory Aa200b Lecture 5 January 20, 2005
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

In-Flight Camber Transformation of Aircraft Wing Based on Variation in Thickness-To-Chord Ratio
International Journal of Industrial Electronics and Electrical Engineering, ISSN: 2347-6982 Volume-2, Issue-7, July-2014 IN-FLIGHT CAMBER TRANSFORMATION OF AIRCRAFT WING BASED ON VARIATION IN THICKNESS-TO-CHORD RATIO 1PRITAM KUMAR PRATIHARI, 2NAVUDAY SHARMA, 3JAYRAJINAMDAR 1,2,3Amity Institute of Space Science and Technology, Amity University, Noida, 201303, Uttar Pradesh, India. E-mail: [email protected], [email protected], [email protected] Abstract- In general, there is wide gap between subsonic flight and supersonic flight, mainly due to aerodynamic limitations. This paper presents a method for development of next generation aircraft wings whose camber can be transformed in-flight for enabling it to fly efficiently in different regimes of Mach number; say, Subsonic to supersonic and vice-versa. To demonstrate the aerodynamic performance of the subsonic airfoil (C141A) and a supersonic airfoil (NACA 65206), the flow is simulated by using the commercial program GAMBIT and FLUENT. An important aspect is the mechanical and hydraulic transformation mechanism working inside the wing which helps it to change the camber according to the requirement. For this mechanism, a Hydraulic expansion-contraction system is used which works on the principle of Master and Slave Piston-cylinder arrangement. This concept can be practically very important to increase aerodynamic efficiency of the aircraft in different regions of subsonic, transonic and supersonic flights. Moreover, this idea of real-time camber transformation can make an aircraft multipurpose in accordance to Mach regime of flight. I. INTRODUCTION transform the camber of the subsonic airfoil to supersonic airfoil and vice versa in flight by variation Much research on the development of aircraft wings of thickness to chord ratio of the airfoil. -

Supersonic Biplane Design Via Adjoint Method A
SUPERSONIC BIPLANE DESIGN VIA ADJOINT METHOD A DISSERTATION SUBMITTED TO THE DEPARTMENT OF AERONAUTICS AND ASTRONAUTICS AND THE COMMITTEE ON GRADUATE STUDIES OF STANFORD UNIVERSITY IN PARTIAL FULFILLMENT OF THE REQUIREMENTS FOR THE DEGREE OF DOCTOR OF PHILOSOPHY Rui Hu May 2009 c Copyright by Rui Hu 2009 All Rights Reserved ii I certify that I have read this dissertation and that, in my opinion, it is fully adequate in scope and quality as a dissertation for the degree of Doctor of Philosophy. (Antony Jameson) Principal Adviser I certify that I have read this dissertation and that, in my opinion, it is fully adequate in scope and quality as a dissertation for the degree of Doctor of Philosophy. (Robert W. MacCormack) I certify that I have read this dissertation and that, in my opinion, it is fully adequate in scope and quality as a dissertation for the degree of Doctor of Philosophy. (Gianluca Iaccarino) Approved for the University Committee on Graduate Studies. iii Abstract In developing the next generation supersonic transport airplane, two major challenges must be resolved. The fuel efficiency must be significantly improved, and the sonic boom propagating to the ground must be dramatically reduced. Both of these objec- tives can be achieved by reducing the shockwaves formed in supersonic flight. The Busemann biplane is famous for using favorable shockwave interaction to achieve nearly shock-free supersonic flight at its design Mach number. Its performance at off-design Mach numbers, however, can be very poor. This dissertation studies the performance of supersonic biplane airfoils at design and off-design conditions. -

Probabilistic Aerothermal Design of Compressor Airfoils Victor E. Garzon
Probabilistic Aerothermal Design of Compressor Airfoils by Victor E. Garzon B.S., University of Kentucky (1994) M.S., University of Kentucky (1998) Submitted to the Department of Aeronautics and Astronautics in partial fulfillment of the requirements for the degree of Doctor of Philosophy at the MASSACHUSETTS INSTITUTE OF TECHNOLOGY February 2003 c Massachusetts Institute of Technology 2003. All rights reserved. Author Department of Aeronautics and Astronautics 11 December 2002 Certified by David L. Darmofal Associate Professor of Aeronautics and Astronautics Thesis Supervisor Certified by Mark Drela Professor of Aeronautics and Astronautics Certified by Edward M. Greitzer H. N. Professor of Aeronautics and Astronautics Certified by Ian A. Waitz Professor of Aeronautics and Astronautics Accepted by Edward M. Greitzer H. N. Slater Professor of Aeronautics and Astronautics Chair, Committee on Graduate Students Probabilistic Aerothermal Design of Compressor Airfoils by Victor E. Garzon Submitted to the Department of Aeronautics and Astronautics on 11 December 2002, in partial fulfillment of the requirements for the degree of Doctor of Philosophy Abstract Despite the generally accepted notion that geometric variability is undesirable in turbo- machinery airfoils, little is known in detail about its impact on aerothermal compressor performance. In this work, statistical and probabilistic techniques were used to assess the impact of geometric and operating condition uncertainty on axial compressor performance. High-fidelity models of geometric variability were constructed from surface measurements of existing hardware using principal component analysis (PCA). A quasi-two-dimensional cascade analysis code, at the core of a parallel probabilistic analysis framework, was used to assess the impact of uncertainty on aerodynamic performance of compressor rotor airfoils. -

Supersonic Channel Airfoils for Reduced Drag
AIAA JOURNAL Vol. 38, No. 3, March 2000 Supersonic Channel Airfoils for Reduced Drag † ‡ Stephen M. Ruf� n,¤ Anurag Gupta, and David Marshall Georgia Institute of Technology, Atlanta, Georgia 30332-0150 A proof-of-concept study is performed for a supersonic channel-airfoil concept, which can be applied to the leading edges of wings, tails, � ns, struts, and other appendages of aircraft, atmospheric entry vehicles, and missiles in supersonic � ight. It is designed to be bene� cial at conditions in which the leading edge is signi� cantly blunted and the Mach number normal to the leading edge is supersonic. The supersonic channel-airfoil concept is found to result in signi� cantly reduced wave drag and total drag (including skin-friction drag) and signi� cantly increased lift/drag although maximum heat-transfer rate was increased for the geometries tested. Introduction In the present paper a preliminary investigation of a drag-reduc VARIETY of supersonicand hypersonicvehiclesare currently tion concept for supersonicairfoils and wings is conducted.A wide A being studied for commercial and military applications. The range of geometric parameters and supersonic � ight conditions are high-speed civil transport (HSCT) aircraft is designed to cruise at considered so that the aerothermodynamic performance of airfoils approximately M = 2.4 and seeks to overcome economic and en employing the present concept are characterized. vironmental barriers1 that have limited the success of previous su personic commercial concepts. Other supersonic � ight vehicles of Overview of Concept signi� cant interest include single-stage-to-orbit (SSTO) and multi Linearizedsupersonictheoryindicatesthatfor an airfoilof a given stage launch vehicles, tactical and strategic hypersonic and super thickness the shape that gives minimum zero-lift bluntness drag is sonic missiles, hypersonic cruise aircraft, and planetary entry ve the sharp diamond airfoil. -
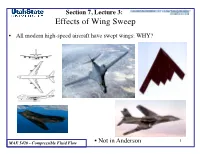
Section 7, Lecture 3: Effects of Wing Sweep
Section 7, Lecture 3: Effects of Wing Sweep • All modern high-speed aircraft have swept wings: WHY? 1 MAE 5420 - Compressible Fluid Flow • Not in Anderson Supersonic Airfoils (revisited) • Normal Shock wave formed off the front of a blunt leading g=1.1 causes significant drag Detached shock waveg=1.3 Localized normal shock wave Credit: Selkirk College Professional Aviation Program 2 MAE 5420 - Compressible Fluid Flow Supersonic Airfoils (revisited, 2) • To eliminate this leading edge drag caused by detached bow wave Supersonic wings are typically quite sharp atg=1.1 the leading edge • Design feature allows oblique wave to attachg=1.3 to the leading edge eliminating the area of high pressure ahead of the wing. • Double wedge or “diamond” Airfoil section Credit: Selkirk College Professional Aviation Program 3 MAE 5420 - Compressible Fluid Flow Wing Design 101 • Subsonic Wing in Subsonic Flow • Subsonic Wing in Supersonic Flow • Supersonic Wing in Subsonic Flow A conundrum! • Supersonic Wing in Supersonic Flow • Wings that work well sub-sonically generally don’t work well supersonically, and vice-versa à Leading edge Wing-sweep can overcome problem with poor performance of sharp leading edge wing in subsonic flight. 4 MAE 5420 - Compressible Fluid Flow Wing Design 101 (2) • Compromise High-Sweep Delta design generates lift at low speeds • Highly-Swept Delta-Wing design … by increasing the angle-of-attack, works “pretty well” in both flow regimes but also has sufficient sweepback and slenderness to perform very Supersonic Subsonic efficiently at high speeds. • On a traditional aircraft wing a trailing vortex is formed only at the wing tips. -
Preceding Page Blank 127
Preceding page blank 127 ~CTERISTICSOF WING SECTIONS AT TRANSONIC SPEEDS By Joh V. Becker Langley ~eronautical Laboratory INTRODUCTION The transonic regime is presumed to begin with the first appearance of a local region of supersonic flow near the airfoil surface and to end when the flow field has become entirely supersonic. The development of theory for transonic flows has been impeded by the coexistence of sub- sonic and supersonic flow regions and the presence of shock. Shock boundary-layer interaction effects which exert a controlling influence fan the transonic region cannot be treated by rigorous theory. The major past of existing knowledge of wTng-section behavior at transonic speeds is therefore derived from experimental research, and any review of the current status such as the present one must depend largely on experimental results . now CHANGES IN THE: TRA~SOIVICREGIME The progressive changes in flow pattern which occur in the transonic regime are illustrated schematically in figure 1. The diagram at the upper left (M = 0.70) represents a condition slightly beyond the critical Mach number (M at which sonic velocity is attained locally). A small region of supersonic flow exists, usually terminated bg shock. The possibility that local supersonic flows of this type can exist without shock is a matter of considerable speculation. Theoretical studies hsve indicated that shock-free flows in an ideal fluid are possible in certain special cases. (see references 1 to 4, for example. ) From the practical standpoint, however, the important fact is that the presence of shock does not have any seriously adverse effects on airfoil performance unless it precipitates boundasy-layer separation. -

Aerodynamic Investigation of Double Wedge Supersonic Airfoil
Published by : International Journal of Engineering Research & Technology (IJERT) http://www.ijert.org ISSN: 2278-0181 Vol. 8 Issue 06, June-2019 Aerodynamic Investigation of Double Wedge Supersonic Airfoil Sai Pradyumna Reddy Gopavaram Jyothi Sushma Is Currently Pursuing Bachelor Degree Program in Is Currently Pursuing Bachelor Degree Program in Aeronautical Engineering in Institute of Aeronautical Aeronautical Engineering in Institute of Aeronautical Engineering, Hyderabad, India. Engineering, Hyderabad, India. Abstract— This is a aerodynamic design study and flow II. METHODOLOGY dynamics of a Double wedge supersonic airfoil. An aerodynamic design methodology was refined by understanding the design A. Ideology which has been developed in Catia V5 and flow simulation Supersonic airfoils for the most part have a geometry as performed in ANSYS fluent. A complete aerodynamic study was performed with Computational Fluid Dynamic analysis which appeared in the assume that has been observed to be gives the performance characteristics like velocity contours, exceptionally compelling at limiting the negative impacts attached shockwave and detached shockwave and it also of shock waves at the wing surfaces close to the edges. evaluates the aerodynamic plots. The velocity contours of the The meager airfoil shape, looking like a diamond shape, supersonic airfoil are found and the selection of appropriate joined with sharp leading and trailing edges is extremely airfoils from a literature review made are also discussed. compelling at coordinating the progression of shock Finally, the results of the aerodynamic design procedure are waves and lessening their solidarity to decrease their presented and appropriate conclusions are drawn. effect on lift age [3]. So the model is planned in catia and Keywords— Catia, Ansys, Fluent, Airfoils, design and then utilized for investigation. -

Example: Supersonic Airfoil
USER GUIDE FOR COMPROP2 Overview of COMPROP2 2 Isentropic Flow Module (5 example problems) 3 Normal Shock Module (3 example problems) 10 Oblique Shock Module (6 example problems) 17 Fanno Flow Module (1 example problem) 28 Rayleigh Flow Module (1 example problem) 31 Airfoil Module (1 example problem) 35 Prepared by: Dr. Afshin J. Ghajar, Regents Professor of Mechanical & Aerospace Engineering, Oklahoma State University, Stillwater, Oklahoma Dr. Lap Mou Tam, Professor of Electromechanical Engineering, University of Macau, Macau, China OVERVIEW OF COMPROP2 COMPROP2 is an interactive computer program for the calculation of the properties of various compressible flows. For engineering applications involving compressible flow analysis, it is inevitable that tedious tables and charts have to be used in order to calculate the compressible flow properties. However, there are restrictions when using those tables and charts, for example, the specific heat ratio which indicates the type of fluid used is one of them. Most of the tables and charts are constructed using a particular value for the specific heat ratio. For other values, tables may not be available and the original equations for a particular flow may need to be solved numerically in order to obtain the desired properties. Moreover, when a situation involving shock waves is encountered, such as an oblique shock or a conical shock, it is very difficult for the user to accurately read the properties from the charts if the desired Mach number is not shown and visual interpolation has to be used. In these situations it is very easy to make calculation mistakes. The software developed (COMPROP2) resolves the above- mentioned problems. -

Chapter 3 Lecture 10 Drag Polar
Flight dynamics-I Prof. E.G. Tulapurkara Chapter-3 Chapter 3 Lecture 10 Drag polar – 5 Topics 3.2.18 Parasite drag area and equivalent skin friction coefficient 3.2.19 A note on estimation of minimum drag coefficients of wings and bodies 3.2.20 Typical values of CDO, A, e and subsonic drag polar 3.2.21 Winglets and their effect on induced drag 3.3 Drag polar at high subsonic, transonic and supersonic speeds 3.3.1 Some aspects of supersonic flow - shock wave, expansion fan and bow shock 3.3.2 Drag at supersonic speeds 3.3.3 Transonic flow regime - critical Mach number and drag divergence Mach number of airfoils, wings and fuselage 3.2.18 Parasite drag area and equivalent skin friction coefficient As mentioned in remark (ii) of the previous subsection, the product C x S is Do called the parasite drag area. For a streamlined airplane the parasite drag is mostly skin friction drag. Further, the skin friction drag depends on the wetted area which is the area of surface in contact with the fluid. The wetted area of the entire airplane is denoted by S . In this background the term ‘Equivalent skin wet friction coefficient (Cfe)’ is defined as: C x S = C x S Do fe wet S S Hence, C C x and C= C wet (3.47) fe = Do DO f e Swet S Reference 3.9, Chapter 12 gives values of Cfe for different types of airplanes. Dept. of Aerospace Engg., Indian Institute of Technology, Madras 1 Flight dynamics-I Prof. -

Ms 2019-2020
University of Dhaka Department of Applied Mathematics MS in Applied Mathematics Session: 2019- 2020 This department offers the program MS in Applied Mathematics which has duration of one academic year. In the program there is a provision for taking up thesis work, subject to the approval of the academic committee of the department. Each student in Group A (non-thesis group) has to take 7 (seven courses, each 4 credits), while each student in Group B (thesis group) has to take 6 (six courses, each 4 credits) out of the courses offered by the academic committee of the department. Students of Group B are allowed to submit their dissertation within four months after the completion of their theory examination. Group A (Non-Thesis Group) Credit Requirements 32 credits Theory Courses (7x4) 28 credits Viva Voce 4 credits Group B (Thesis Group) Credit Requirements 34 credits Theory Courses (6x4) 24 credits General Viva Voce 02 credits Thesis 08 credits (6 credits for dissertation and 2 credits for presentation) Evaluation: Incourse 30 marks (Attendance 5 + Incourse examination 25), Final Examination (Theory, 4 hours): 70 marks. Eight questions will be set, of which any Five are to be answered. Course Titles AMT 501 Theory of Relativity And Cosmology 4 credits AMT 502 Geophysical Fluid Dynamics 4 credits AMT 503 Mathematical Hydrology 4 credits AMT 504 Applied Numerical Methods 4 credits AMT 505 Magnetohydrodynamics 4 credits AMT 506 Riemannian Geometry 4 credits AMT 507 Stochastic Modeling in Finance 4 credits AMT 508 Aerodynamics 4 credits AMT 509 Computational Fluid Dynamics 4 credits AMT 510 Dynamical Meteorology 4 credits AMT 511 Applied Dynamical Systems 4 credits AMT 512 Biofluid Dynamics 4 credits AMT 513 Mechanics of Flight 4 credits 1 Detailed Syllabi AMT 501: Theory of Relativity and Cosmology 4 credits Introduction and Specific Objectives It is an excellent introductory combined course on theory of relativity and cosmology. -
Supersonic Flow on Finite Thickness Wings!
Section 7, Lecture 2: " Supersonic Flow on Finite Thickness Wings! • Concept of Wave Drag! • Anderson, Chapter 4, pp. 174-179 ! 1! MAE 5420 - Compressible Fluid Flow! Supersonic Airfoils! • Recall that for a leading edge in Supersonic flow there is! γ=1.1! a maximum wedge angle at which the oblique shock wave! remains attached ! γ=1.3! • Beyond that angle! γ=1.1! γ=1.05! γ=1.4! shock wave becomes! γ=1.2! detached from! =1.3! γ leading edge! γ=1.4! % 2 M 2 sin2 1 ' −1 { 1 (βmax ) − } θmax = tan ) * ) tan β %2 + M 2 %γ + cos 2β '' * & ( max )& 1 & ( max )(( ( % M 2 ( 1) 4 16( 1) 8M 2 ( 2 1) M 4 ( 1)2 ' 1 −1 ( 1 γ − + ) − γ + + 1 γ − + 1 γ + β = cos ) * max 2 2γ M 2 &) 1 (* 2! MAE 5420 - Compressible Fluid Flow! Section 6: Home Work 1(continued) g = 1.25 MAE 5420 - Compressible Fluid Flow Section 6: Home Work 1(Part 2 continued) g = 1.4 MAE 5420 - Compressible Fluid Flow Supersonic Airfoils (cont’d)! • Normal Shock wave formed off the front of a blunt leading! γ=1.1! causes significant drag! Detached shock waveγ!=1.3! Localized normal shock wave! Credit: Selkirk College Professional Aviation Program! 3! MAE 5420 - Compressible Fluid Flow! Supersonic Airfoils (cont’d)! • To eliminate this leading edge drag caused by detached bow wave ! Supersonic wings are typically quite sharp atγ=1.1 the! leading edge ! • Design feature allows oblique wave to attachγ=1.3 to !the leading edge ! eliminating the area of high pressure ahead of the wing. -

A First Course on Aerodynamics
Arnab Roy A First Course on Aerodynamics 2 Download free eBooks at bookboon.com A First Course on Aerodynamics © 2015 Arnab Roy & bookboon.com ISBN 978-87-7681-926-2 3 Download free eBooks at bookboon.com A First Course on Aerodynamics Contents Contents 1 Fundamental Concepts in Aerodynamics and Inviscid Incompressible Flow 6 1.1 Introduction 6 1.2 Definition and approach 6 1.3 Fundamental concepts 7 1.4 Governing equations of fluid flow 15 1.5 Thin Airfoil Theory 25 1.6 Finite Wing Theory 28 1.7 Multiple choice questions 31 1.8 Figures 34 2 Fundamentals of Inviscid Compressible Flow 42 2.1 Introduction 42 2.2 One Dimensional Flow Equations: Isentropic flow, stagnation condition, Normal Shock 45 2.3 Quasi One Dimensional Flow: Nozzle and diffuser flow 52 2.4 Oblique shocks and Expansion waves 56 2.5 Linearised Theory: Compressible flow past thin airfoil 60 2.6 Hypersonic flow 63 �e Graduate Programme I joined MITAS because for Engineers and Geoscientists I wanted real responsibili� www.discovermitas.comMaersk.com/Mitas �e Graduate Programme I joined MITAS because for Engineers and Geoscientists I wanted real responsibili� Maersk.com/Mitas Month 16 I wwasas a construction Month 16 supervisorI wwasas in a construction the North Sea supervisor in advising and the North Sea Real work helpinghe foremen advising and IInternationalnternationaal opportunities ��reeree wworkoro placements solves Real work problems helpinghe foremen IInternationalnternationaal opportunities ��reeree wworkoro placements solves problems 4 Click on the ad to read