Chapter 10: Events, Worldlines, Intervals
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

A Mathematical Derivation of the General Relativistic Schwarzschild
A Mathematical Derivation of the General Relativistic Schwarzschild Metric An Honors thesis presented to the faculty of the Departments of Physics and Mathematics East Tennessee State University In partial fulfillment of the requirements for the Honors Scholar and Honors-in-Discipline Programs for a Bachelor of Science in Physics and Mathematics by David Simpson April 2007 Robert Gardner, Ph.D. Mark Giroux, Ph.D. Keywords: differential geometry, general relativity, Schwarzschild metric, black holes ABSTRACT The Mathematical Derivation of the General Relativistic Schwarzschild Metric by David Simpson We briefly discuss some underlying principles of special and general relativity with the focus on a more geometric interpretation. We outline Einstein’s Equations which describes the geometry of spacetime due to the influence of mass, and from there derive the Schwarzschild metric. The metric relies on the curvature of spacetime to provide a means of measuring invariant spacetime intervals around an isolated, static, and spherically symmetric mass M, which could represent a star or a black hole. In the derivation, we suggest a concise mathematical line of reasoning to evaluate the large number of cumbersome equations involved which was not found elsewhere in our survey of the literature. 2 CONTENTS ABSTRACT ................................. 2 1 Introduction to Relativity ...................... 4 1.1 Minkowski Space ....................... 6 1.2 What is a black hole? ..................... 11 1.3 Geodesics and Christoffel Symbols ............. 14 2 Einstein’s Field Equations and Requirements for a Solution .17 2.1 Einstein’s Field Equations .................. 20 3 Derivation of the Schwarzschild Metric .............. 21 3.1 Evaluation of the Christoffel Symbols .......... 25 3.2 Ricci Tensor Components ................. -

Physics 200 Problem Set 7 Solution Quick Overview: Although Relativity Can Be a Little Bewildering, This Problem Set Uses Just A
Physics 200 Problem Set 7 Solution Quick overview: Although relativity can be a little bewildering, this problem set uses just a few ideas over and over again, namely 1. Coordinates (x; t) in one frame are related to coordinates (x0; t0) in another frame by the Lorentz transformation formulas. 2. Similarly, space and time intervals (¢x; ¢t) in one frame are related to inter- vals (¢x0; ¢t0) in another frame by the same Lorentz transformation formu- las. Note that time dilation and length contraction are just special cases: it is time-dilation if ¢x = 0 and length contraction if ¢t = 0. 3. The spacetime interval (¢s)2 = (c¢t)2 ¡ (¢x)2 between two events is the same in every frame. 4. Energy and momentum are always conserved, and we can make e±cient use of this fact by writing them together in an energy-momentum vector P = (E=c; p) with the property P 2 = m2c2. In particular, if the mass is zero then P 2 = 0. 1. The earth and sun are 8.3 light-minutes apart. Ignore their relative motion for this problem and assume they live in a single inertial frame, the Earth-Sun frame. Events A and B occur at t = 0 on the earth and at 2 minutes on the sun respectively. Find the time di®erence between the events according to an observer moving at u = 0:8c from Earth to Sun. Repeat if observer is moving in the opposite direction at u = 0:8c. Answer: According to the formula for a Lorentz transformation, ³ u ´ 1 ¢tobserver = γ ¢tEarth-Sun ¡ ¢xEarth-Sun ; γ = p : c2 1 ¡ (u=c)2 Plugging in the numbers gives (notice that the c implicit in \light-minute" cancels the extra factor of c, which is why it's nice to measure distances in terms of the speed of light) 2 min ¡ 0:8(8:3 min) ¢tobserver = p = ¡7:7 min; 1 ¡ 0:82 which means that according to the observer, event B happened before event A! If we reverse the sign of u then 2 min + 0:8(8:3 min) ¢tobserver 2 = p = 14 min: 1 ¡ 0:82 2. -

Modified Gravity and Thermodynamics of Time-Dependent Wormholes At
Journal of High Energy Physics, Gravitation and Cosmology, 2017, 3, 708-714 http://www.scirp.org/journal/jhepgc ISSN Online: 2380-4335 ISSN Print: 2380-4327 Modified fR( ) Gravity and Thermodynamics of Time-Dependent Wormholes at Event Horizon Hamidreza Saiedi Department of Physics, Florida Atlantic University, Boca Raton, FL, USA How to cite this paper: Saiedi, H. (2017) Abstract Modified f(R) Gravity and Thermodynam- ics of Time-Dependent Wormholes at In the context of modified fR( ) gravity theory, we study time-dependent Event Horizon. Journal of High Energy wormhole spacetimes in the radiation background. In this framework, we at- Physics, Gravitation and Cosmology, 3, 708-714. tempt to generalize the thermodynamic properties of time-dependent worm- https://doi.org/10.4236/jhepgc.2017.34053 holes in fR( ) gravity. Finally, at event horizon, the rate of change of total Received: August 1, 2017 entropy has been discussed. Accepted: October 20, 2017 Published: October 23, 2017 Keywords Copyright © 2017 by author and fR( ) Gravity, Time-Dependent Wormholes, Thermodynamics, Scientific Research Publishing Inc. Event Horizon This work is licensed under the Creative Commons Attribution International License (CC BY 4.0). http://creativecommons.org/licenses/by/4.0/ 1. Introduction Open Access Wormholes, short cuts between otherwise distant or unconnected regions of the universe, have become a popular research topic since the influential paper of Morris and Thorne [1]. Early work was reviewed in the book of Visser [2]. The Morris-Thorne (MT) study was restricted to static, spherically symmetric space-times, and initially there were various attempts to generalize the definition of wormhole by inserting time-dependent factors into the metric. -
Chapter 2: Minkowski Spacetime
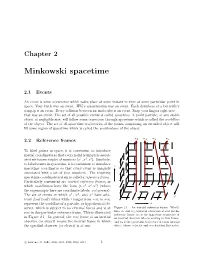
Chapter 2 Minkowski spacetime 2.1 Events An event is some occurrence which takes place at some instant in time at some particular point in space. Your birth was an event. JFK's assassination was an event. Each downbeat of a butterfly’s wingtip is an event. Every collision between air molecules is an event. Snap your fingers right now | that was an event. The set of all possible events is called spacetime. A point particle, or any stable object of negligible size, will follow some trajectory through spacetime which is called the worldline of the object. The set of all spacetime trajectories of the points comprising an extended object will fill some region of spacetime which is called the worldvolume of the object. 2.2 Reference frames w 1 w 2 w 3 w 4 To label points in space, it is convenient to introduce spatial coordinates so that every point is uniquely associ- ated with some triplet of numbers (x1; x2; x3). Similarly, to label events in spacetime, it is convenient to introduce spacetime coordinates so that every event is uniquely t associated with a set of four numbers. The resulting spacetime coordinate system is called a reference frame . Particularly convenient are inertial reference frames, in which coordinates have the form (t; x1; x2; x3) (where the superscripts here are coordinate labels, not powers). The set of events in which x1, x2, and x3 have arbi- x 1 trary fixed (real) values while t ranges from −∞ to +1 represent the worldline of a particle, or hypothetical ob- x 2 server, which is subject to no external forces and is at Figure 2.1: An inertial reference frame. -

Modern Physics
Modern Physics Luis A. Anchordoqui Department of Physics and Astronomy Lehman College, City University of New York Lesson IV September 24, 2015 L. A. Anchordoqui (CUNY) Modern Physics 9-24-2015 1 / 22 Table of Contents 1 Minkowski Spacetime Causal structure Lorentz invariance L. A. Anchordoqui (CUNY) Modern Physics 9-24-2015 2 / 22 Minkowski Spacetime Causal structure (1, 3) spacetime Primary unit in special relativity + event Arena 8 events in universe + Minkowski spacetime Events take place in a four dimensional structure that contains 3-dimensional Euclidean space + 1 time dimension Interval Ds2 = cDt2 − Dx2 − Dy2 − Dz2 (1) invarinat measure for Lorentz-Poincare´ transformations L. A. Anchordoqui (CUNY) Modern Physics 9-24-2015 3 / 22 Minkowski Spacetime Causal structure Lorentz boosts + rotations Galilean transformations preserve the usual Pythagorian distance D~r 2 = Dx2 + Dy2 + Dz2 which is invariant under rotations and spatial translations Lorentz transformations (boosts + rotations) preserve interval Ds2 = c2Dt2 − Dx2 − Dy2 − Dz2 Since interval is defined by differences in coordinates it is also invariant under translations in spacetime (Poincare invariance) (1, 3) spacetime ≡ (1, 1) spacetime ⊕ rotations L. A. Anchordoqui (CUNY) Modern Physics 9-24-2015 4 / 22 Minkowski Spacetime Causal structure Trajectory + connected set of events representing places + times through which particle moves Worldlines + trajectories of massive particles and observers At any event on trajectory + slope is inverse of velocity relative to inertial -

Gödel-Type Metrics in Various Dimensions
INSTITUTE OF PHYSICS PUBLISHING CLASSICAL AND QUANTUM GRAVITY Class. Quantum Grav. 22 (2005) 1527–1543 doi:10.1088/0264-9381/22/9/003 Godel-type¨ metrics in various dimensions Metin Gurses¨ 1, Atalay Karasu2 and Ozg¨ ur¨ Sarıoglu˘ 2 1 Department of Mathematics, Faculty of Sciences, Bilkent University, 06800 Ankara, Turkey 2 Department of Physics, Faculty of Arts and Sciences, Middle East Technical University, 06531 Ankara, Turkey E-mail: [email protected], [email protected] and [email protected] Received 20 September 2004, in final form 8 February 2005 Published 6 April 2005 Online at stacks.iop.org/CQG/22/1527 Abstract Godel-type¨ metrics are introduced and used in producing charged dust solutions in various dimensions. The key ingredient is a (D−1)-dimensional Riemannian geometry which is then employed in constructing solutions to the Einstein– Maxwell field equations with a dust distribution in D dimensions. The only essential field equation in the procedure turns out to be the source-free Maxwell’s equation in the relevant background. Similarly the geodesics of this type of metric are described by the Lorentz force equation for a charged particle in the lower dimensional geometry. It is explicitly shown with several examples that Godel-type¨ metrics can be used in obtaining exact solutions to various supergravity theories and in constructing spacetimes that contain both closed timelike and closed null curves and that contain neither of these. Among the solutions that can be established using non-flat backgrounds, such as the Tangherlini metrics in (D − 1)-dimensions, there exists a class which can be interpreted as describing black-hole-type objects in a Godel-like¨ universe. -

Lense-Thirring Precession in Strong Gravitational Fields
1 Lense-Thirring Precession in Strong Gravitational Fields Chandrachur Chakraborty Tata Institute of Fundamental Research, Mumbai 400005, India Abstract The exact frame-dragging (or Lense-Thirring (LT) precession) rates for Kerr, Kerr-Taub-NUT (KTN) and Taub-NUT spacetimes have been derived. Remarkably, in the case of the ‘zero an- gular momentum’ Taub-NUT spacetime, the frame-dragging effect is shown not to vanish, when considered for spinning test gyroscope. In the case of the interior of the pulsars, the exact frame- dragging rate monotonically decreases from the center to the surface along the pole and but it shows an ‘anomaly’ along the equator. Moving from the equator to the pole, it is observed that this ‘anomaly’ disappears after crossing a critical angle. The ‘same’ anomaly can also be found in the KTN spacetime. The resemblance of the anomalous LT precessions in the KTN spacetimes and the spacetime of the pulsars could be used to identify a role of Taub-NUT solutions in the astrophysical observations or equivalently, a signature of the existence of NUT charge in the pulsars. 1 Introduction Stationary spacetimes with angular momentum (rotation) are known to exhibit an effect called Lense- Thirring (LT) precession whereby locally inertial frames are dragged along the rotating spacetime, making any test gyroscope in such spacetimes precess with a certain frequency called the LT precession frequency [1]. This frequency has been shown to decay as the inverse cube of the distance of the test gyroscope from the source for large enough distances where curvature effects are small, and known to be proportional to the angular momentum of the source. -

Special Relativity: Tensor Calculus and Four-Vectors
Special Relativity: Tensor Calculus and Four-Vectors Looking ahead to general relativity, where such things are more important, we will now introduce the mathematics of tensors and four-vectors. The Mathematics of Spacetime Let's start by de¯ning some geometric objects. Bear with me for the ¯rst couple, which seem obvious but lay the groundwork for the less obvious sequels. Scalar.|A scalar is a pure number, meaning that all observers will agree on its value. For example, the number \3" is a scalar. Okay, that one's trivial, but there are others that aren't so obvious, and we'll get to those in a bit. Event.|Next we have an event. An event is e®ectively a \point" in spacetime. More generally, if you have an N-dimensional space, you need N numbers to label it uniquely. For example, in two dimensions you need two numbers; e.g., x and y for a plane, or and Á for the surface of a sphere. For spacetime, you need four numbers: e.g., t, x, y, and z. Naturally, the essence of the event isn't changed if you relabel the coordinates. I want to stress this, because something that is obvious for events but may not be obvious for some other geometric objects is that although when you ¯nally calculate something you may choose a coordinate system and break things into components, there is also an independent reality (well, within the math at least!) of the objects. Going with the coordinate-free representation has proved very helpful in proving theorems about spacetime, but when doing astrophysics it is usually best to investigate components in some given system. -

A Geometric Introduction to Spacetime and Special Relativity
A GEOMETRIC INTRODUCTION TO SPACETIME AND SPECIAL RELATIVITY. WILLIAM K. ZIEMER Abstract. A narrative of special relativity meant for graduate students in mathematics or physics. The presentation builds upon the geometry of space- time; not the explicit axioms of Einstein, which are consequences of the geom- etry. 1. Introduction Einstein was deeply intuitive, and used many thought experiments to derive the behavior of relativity. Most introductions to special relativity follow this path; taking the reader down the same road Einstein travelled, using his axioms and modifying Newtonian physics. The problem with this approach is that the reader falls into the same pits that Einstein fell into. There is a large difference in the way Einstein approached relativity in 1905 versus 1912. I will use the 1912 version, a geometric spacetime approach, where the differences between Newtonian physics and relativity are encoded into the geometry of how space and time are modeled. I believe that understanding the differences in the underlying geometries gives a more direct path to understanding relativity. Comparing Newtonian physics with relativity (the physics of Einstein), there is essentially one difference in their basic axioms, but they have far-reaching im- plications in how the theories describe the rules by which the world works. The difference is the treatment of time. The question, \Which is farther away from you: a ball 1 foot away from your hand right now, or a ball that is in your hand 1 minute from now?" has no answer in Newtonian physics, since there is no mechanism for contrasting spatial distance with temporal distance. -

Black Hole Math Is Designed to Be Used As a Supplement for Teaching Mathematical Topics
National Aeronautics and Space Administration andSpace Aeronautics National ole M a th B lack H i This collection of activities, updated in February, 2019, is based on a weekly series of space science problems distributed to thousands of teachers during the 2004-2013 school years. They were intended as supplementary problems for students looking for additional challenges in the math and physical science curriculum in grades 10 through 12. The problems are designed to be ‘one-pagers’ consisting of a Student Page, and Teacher’s Answer Key. This compact form was deemed very popular by participating teachers. The topic for this collection is Black Holes, which is a very popular, and mysterious subject among students hearing about astronomy. Students have endless questions about these exciting and exotic objects as many of you may realize! Amazingly enough, many aspects of black holes can be understood by using simple algebra and pre-algebra mathematical skills. This booklet fills the gap by presenting black hole concepts in their simplest mathematical form. General Approach: The activities are organized according to progressive difficulty in mathematics. Students need to be familiar with scientific notation, and it is assumed that they can perform simple algebraic computations involving exponentiation, square-roots, and have some facility with calculators. The assumed level is that of Grade 10-12 Algebra II, although some problems can be worked by Algebra I students. Some of the issues of energy, force, space and time may be appropriate for students taking high school Physics. For more weekly classroom activities about astronomy and space visit the NASA website, http://spacemath.gsfc.nasa.gov Add your email address to our mailing list by contacting Dr. -

Astrophysical Wormholes
universe Article Astrophysical Wormholes Cosimo Bambi 1,* and Dejan Stojkovic 2 1 Center for Field Theory and Particle Physics and Department of Physics, Fudan University, Shanghai 200438, China 2 Department of Physics, State University of New York (SUNY) at Buffalo, Buffalo, NY 14260-1500, USA; [email protected] * Correspondence: [email protected] Abstract: Wormholes are hypothetical topologically-non-trivial structures of spacetime. From the theoretical point of view, the possibility of their existence is challenging but cannot be ruled out. This article is a compact and non-exhaustive review of past and current efforts to search for astro- physical wormholes in the Universe. Keywords: wormholes; black holes; spacetime topology; gravity 1. Introduction Wormholes are hypothetical spacetime structures with non-trivial topologies capable of connecting either two distant regions of the same universe or two different universes, as illustrated in Figure1. The entrances of a wormhole are called the “mouths” of the wormhole and the spacetime region connecting the mouths is called the “throat” of the wormhole. The simplest wormhole configuration has two mouths connected by a throat, but more complex structures are also possible [1]. Strictly speaking, wormholes are not a prediction of general relativity or of other theories of gravity. They are spacetime structures Citation: Bambi, C.; Stojkovic, D. that can potentially exist in curved spacetimes, so they exist in a very wide class of gravity Astrophysical Wormholes. Universe models. The formation mechanisms and stability of these spacetime structures depend on 2021, 7, 136. https://doi.org/ 10.3390/universe7050136 the specific gravity theory and often present problems, so the existence of wormholes in the Universe is challenging. -

On Spacetime Coordinates in Special Relativity
On spacetime coordinates in special relativity Nilton Penha * Departamento de Física, Universidade Federal de Minas Gerais, Brazil. Bernhard Rothenstein ** "Politehnica" University of Timisoara, Physics Department, Timisoara, Romania. Starting with two light clocks to derive time dilation expression, as many textbooks do, and then adding a third one, we work on relativistic spacetime coordinates relations for some simple events as emission, reflection and return of light pulses. Besides time dilation, we get, in the following order, Doppler k-factor, addition of velocities, length contraction, Lorentz Transformations and spacetime interval invariance. We also use Minkowski spacetime diagram to show how to interpret some few events in terms of spacetime coordinates in three different inertial frames. I – Introduction Any physical phenomenon happens independently of the reference frame we may be using to describe it. It happens at a spatial position at a certain time. Then to characterize one such event we need to know three spatial coordinates and the time coordinate in a four dimensional spacetime, as we usually refer to the set of all possible events. In such spacetime, an event is a point with coordinates (x,y,z,t) or (x,y,z,ct) as it is much used where c is the light speed in the vacuum, admitted as constant according to the second postulate of special relativity; the first postulate is that “all physics laws are the same in all inertial frames”. Treating the time as ct instead of t has the advantage of improving the transparence of the symmetry that exists between space and time in special relativity.