A Coning Theory of Bullet Motions James A. Boatright Revised: March 2018
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Gun Law History in the United States and Second Amendment Rights
SPITZER_PROOF (DO NOT DELETE) 4/28/2017 12:07 PM GUN LAW HISTORY IN THE UNITED STATES AND SECOND AMENDMENT RIGHTS ROBERT J. SPITZER* I INTRODUCTION In its important and controversial 2008 decision on the meaning of the Second Amendment, District of Columbia v. Heller,1 the Supreme Court ruled that average citizens have a constitutional right to possess handguns for personal self- protection in the home.2 Yet in establishing this right, the Court also made clear that the right was by no means unlimited, and that it was subject to an array of legal restrictions, including: “prohibitions on the possession of firearms by felons and the mentally ill, or laws forbidding the carrying of firearms in sensitive places such as schools and government buildings, or laws imposing conditions and qualifications on the commercial sale of arms.”3 The Court also said that certain types of especially powerful weapons might be subject to regulation,4 along with allowing laws regarding the safe storage of firearms.5 Further, the Court referred repeatedly to gun laws that had existed earlier in American history as a justification for allowing similar contemporary laws,6 even though the court, by its own admission, did not undertake its own “exhaustive historical analysis” of past laws.7 In so ruling, the Court brought to the fore and attached legal import to the history of gun laws. This development, when added to the desire to know our own history better, underscores the value of the study of gun laws in America. In recent years, new and important research and writing has chipped away at old Copyright © 2017 by Robert J. -

Bullets BULLETS Caliber Item # Qty Price Trueshot Projectiles Will Feature the Same 38-40 Cal (.401” Dia) Exceptional Alloy and Also Provide Shooters 180 Gr
BULLETS Oregon Trail / Laser Cast Bullets TrueShot Cast Pistol Bullets BULLETS Caliber Item # Qty Price TrueShot projectiles will feature the same 38-40 Cal (.401” dia) exceptional alloy and also provide shooters 180 Gr. RN FP ........ ORG20408 .. 500. $64.99 with a selection of bullet weights previously unavailable in cast bullets. Thanks to their Rainier Bullets 40/10mm (.401” dia) uniform grain structure, these hard-hitting Caliber Item # Qty Price The Laser Cast Silver bullet is an inclusion of silver 155 Gr. RN SWC ...... ORG20501 .. 500. $60.99 heavyweights will give you the awesome 40 Cal / 10mm (.400” dia) in conjunction with their proprietary blend of 7 el- 170 Gr. SWC .......... ORG20502 .. 500. $63.29 penetration that you need. Their advanced 165 Gr. FP ..........RAIN35330 ...1000 ..$117.99 Remington Rifle Bullets Caliber Item # Qty Price GS BJHP MC JHP SP SJHP LDSWC ements to produce an unbeatable hard cast lead 180 Gr. TC ............ ORG20503 .. 500. $64.99 design and flawless consistency make them 165 Gr. HP .........RAIN15420 ... 100 ...$15.99 ideal for any shooting sport that demands pin- 22 Cal (.224” dia) bullet of unprecedented toughness, consistency 185 Gr. RN SWC ...... ORG20504 .. 500. $65.99 165 Gr. HP .........RAIN25420 ... 500 ...$63.49 World-class accuracy and unmatched reliability on- point accuracy. 45 Gr. SP ..............RMB22705 ..100. .$19.49 and precision. Slick Silver bearing alloy yields 41 Cal (.412” dia) 165 Gr. HP .........RAIN35320 ...1000 ..$124.99 game were just two of the many reasons Reming- higher velocities with no leading. 215 Gr. SWC .......... ORG20600 .. 500. $71.79 TrueShot Cast Pistol Bullets 165 Gr. -

Reloader's Guide
2018 RELOADER’S GUIDE Our Mission: PREMIUM PERFORMANCE, CONSISTENT QUALITY. very container of Alliant smokeless powder The result: a line of products known and Eis backed by a century of manufacturing respected for consistent quality and experience, and the most exacting quality- performance—not only in the lab, but especial- control procedures in the industry. We check ly on the firing line. One of the reasons you’re and control chemical composition, the shape and a reloader, after all, is so you’ll know exactly size of powder grains, and even the propellants’ what to expect every time you pull the trigger. density and porosity. We send samples of With Alliant powders you will. Not only shell every batch to our ballistics lab, testing, among after shell, but also year after year. other things, for burning speed. Then, after blending batches together for exactly the right ballistic characteristics, we use our advanced computerized equipment to test again. Functional Wholesaler Approval List Wholesaler Location Phone # AcuSport Utah and Ohio 937-593-7010 CAC Pennsylvania 814-472-4430 Camfour Massachusetts 413-568-9663 Chattanooga Shooting Supply Tennessee 423-894-3007 Continental Wisconsin 608-779-9820 Crow's Shooters Supply Iowa 641-522-5821 Dawson Enterprises Ohio 330-833-0014 Fin-Feather-Fur Ohio 419-281-2557 Gene Sears Distributors Oklahoma 405-262-2647 Graf & Sons Missouri 800-531-2666 Gunarama Washington 509-535-3040 Hill Country Wholesale Texas 800-777-2666 Jerry’s Sport, Inc. Pennsylvania 800-234-2612 L. M. Burney Inc Texas 800-737-3006 Lawry Targets Ontario, Canada 905-765-3342 North East Distributors New York 585-248-3435 Pacific Flyway Utah 801-304-4365 Parks & Son North Carolina 800-992-6504 Powder Valley Kansas 620-229-8685 Schanz Shooters Supply Michigan 269-692-2897 Sports South Louisiana 800-388-3845 Sunset Distributors Iowa 641-847-2464 Trainer Hale Supply Texas 830-420-4530 W.A. -

Standard Bullet Specs
Page 1 of 13 Home Presses Intro Site Map P.R. Chemicals Answers Prices Specials How To Bullets B.Makers Books Classified Topics Jackets Terms Training Software Products Contact us Standard Bullet Specs Target Wadcutter Button Nose TWC Wadcutter BWC Conical SWC Truncated Cone TC Keith SWC Rebated Boattail Elliptical Ogives Spitzer Ogives SWC Noses Design Page Bullet Types Build a Kit Bullet drawings by Greg Duval, Die-maker, Corbin Mfg. Legal Notice: Information published here is for comparative purposes and does not represent or imply any guarantee or warranty for any purpose. Unless otherwise specified in writing by the customer, at the time of order placement, it is presumed that the customer will accept specifications based on Corbin's best judgement and standard practice. Send a dimensioned drawing with tolerances specified, if such deviation from published specifications is not acceptable. A custom tooling and/or engineering development fee may apply when tolerances or dimensions vary from normal production standards. Target Wadcutter TWC Page 2 of 13 Groove (G) Caliber Margin (M) Depth (D) Width 451-454 .040-.050 .031 .031 429-430 .040-.050 .031 .031 410-400 .040-.050 .031 .031 358-355 .040-.050 .031 .031 314-308 .030-.040 .031 .020 257-251 .030-.040 .031 .020 The TWC or Target Wadcutter can be ordered with Base Guard(tm), hollow, cup, dish, flat or RBT base. It is generally preferred for international pistol matches in 32 caliber, and with other firearms which do not feed well with anything but a flat profile nose. It is highly accurate for short to medium ranges at subsonic velocity, especially with a hollow base or cup base design. -

30-06 Springfield 1 .30-06 Springfield
.30-06 Springfield 1 .30-06 Springfield .30-06 Springfield .30-06 Springfield cartridge with soft tip Type Rifle Place of origin United States Service history In service 1906–present Used by USA and others Wars World War I, World War II, Korean War, Vietnam War, to present Production history Designer United States Military Designed 1906 Produced 1906–present Specifications Parent case .30-03 Springfield Case type Rimless, bottleneck Bullet diameter .308 in (7.8 mm) Neck diameter .340 in (8.6 mm) Shoulder diameter .441 in (11.2 mm) Base diameter .471 in (12.0 mm) Rim diameter .473 in (12.0 mm) Rim thickness .049 in (1.2 mm) Case length 2.494 in (63.3 mm) Overall length 3.34 in (85 mm) Case capacity 68 gr H O (4.4 cm3) 2 Rifling twist 1-10 in. Primer type Large Rifle Maximum pressure 60,200 psi Ballistic performance Bullet weight/type Velocity Energy 150 gr (10 g) Nosler Ballistic Tip 2,910 ft/s (890 m/s) 2,820 ft·lbf (3,820 J) 165 gr (11 g) BTSP 2,800 ft/s (850 m/s) 2,872 ft·lbf (3,894 J) 180 gr (12 g) Core-Lokt Soft Point 2,700 ft/s (820 m/s) 2,913 ft·lbf (3,949 J) 200 gr (13 g) Partition 2,569 ft/s (783 m/s) 2,932 ft·lbf (3,975 J) 220 gr (14 g) RN 2,500 ft/s (760 m/s) 2,981 ft·lbf (4,042 J) .30-06 Springfield 2 Test barrel length: 24 inch 60 cm [] [] Source(s): Federal Cartridge / Accurate Powder The .30-06 Springfield cartridge (pronounced "thirty-aught-six" or "thirty-oh-six"),7.62×63mm in metric notation, and "30 Gov't 06" by Winchester[1] was introduced to the United States Army in 1906 and standardized, and was in use until the 1960s and early 1970s. -
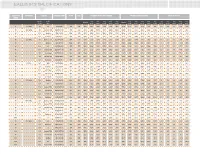
Ballistics Specifications
BALLISTICS SPECIFICATIONS SUGGESTED CARTRIDGE BULLET PRODUCT CODE MSRP B/C VELOCITY IN FEET PER SECOND ENERGY IN FOOT-POUNDS PATH OF BULLET USAGE Weight Bullet 100 200 300 400 500 100 200 300 400 500 100 200 300 400 500 Muzzle Muzzle Grains Type yards yards yards yards yards yards yards yards yards yards yards yards yards yards yards V .224 Wby. 55 SP H22455SP $75 .235 3650 3192 2780 2403 2056 1741 1627 1244 944 705 516 370 2.8 3.7 0.0 -9.8 -27.9 M .240 Wby. 80 Barnes TTSX B24080TTSX $99 .333 3500 3222 2962 2717 2484 2264 2448 2075 1753 1475 1233 1024 2.6 3.3 0.0 -8.0 -21.6 M 100 Spitzer G240100SR $44 .302 3200 2875 2573 2290 2025 1780 2274 1836 1470 1165 911 703 3.6 4.4 0.0 -11.1 -30.7 M 100 Partition N240100PT $99 .384 3406 3136 2882 2642 2415 2199 2576 2183 1844 1550 1294 1073 2.8 3.5 0.0 -8.4 -22.9 M .257 Wby. 80 Barnes TTSX B25780TTSX $99 .316 3870 3561 3274 3005 2753 2514 2661 2253 1904 1605 1346 1123 1.9 2.6 0.0 -6.4 -17.4 M 100 Spitzer G257100SR $44 .256 3500 3091 2718 2375 2057 1766 2721 2122 1641 1253 940 693 3.0 3.9 0.0 -10.1 -28.5 M 100 SP H257100SP $75 .357 3602 3298 3016 2750 2500 2264 2881 2416 2019 1680 1388 1138 2.4 3.1 0.0 -7.7 -21.0 M 100 Barnes TTSX B257100TTSX $99 .370 3570 3312 3079 2840 2623 2203 2731 2352 2019 1725 1496 1239 2.9 3.7 0.0 -8.8 -23.7 M 110 Accubond N257110ACB $99 .418 3460 3207 2969 2744 2529 2325 2925 2513 2154 1839 1563 1320 2.7 3.3 0.0 -7.9 -21.2 M 115 Ballistic Tip N257115BST $85 .453 3400 3170 2952 2745 2547 2357 2952 2566 2226 1924 1656 1419 3.0 3.5 0.0 -7.9 -21.5 M 120 Partition N257120PT $99 -
Hodgdon Basic Reloading Manual 2019 (Pdf)
Winchester® WinClean® 244™ New handgun ball powder ideally suited to the 38 Special, 45 Auto, and 9mm standard loads. Consistency, clean burning, low flash, and a broad range of applications make this powder a perfect choice for any pistol cartridge handloader. • Reduces copper fouling and residue, extending accuracy for longer shooting periods. • Consistent and clean burning, making clean up quick and easy. • Precise metering, ensuring consistent handloads, time-after-time. Available in 1-LB, 4-LB & 8-LB Canisters Three Powder Reloading Manuals in One Reloading data from THREE – Hodgdon®, IMR® and Winchester® Smokeless Propellants – powder brands is Winchester® WinClean® 244™ included in this one reloading manual. Data is listed for many popular RIFLE, PISTOL and SHOTSHELL loads. New handgun ball powder ideally For the most comprehensive, up-to-date reloading data, including many new caliber introductions, please visit suited to the 38 Special, 45 Auto, and the Hodgdon Reloading Data Center at www.HodgdonReloading.com or call 913-362-9455 for technical service. 9mm standard loads. Consistency, clean burning, low flash, and a broad range of applications make this powder a perfect choice for any Contents page Mission Statement Hodgdon New Products . .2 Hodgdon Powder Company operates following Biblical principles to honor God. Our pistol cartridge handloader. mission is to provide quality products and services in a manner which enhances the Introduction . 3 lives of our employees, families, customers, suppliers, and our communities. In • Reduces copper fouling and residue, Powder Descriptions . 4-5 doing so, we will deal with integrity and honesty, reflecting that people are more extending accuracy for longer Hodgdon Rifle Powders . -

Flat Base Or Boatail How and Why: the Bullet Does the Actual Killing. The
Flat Base or Boatail how and why: The bullet does the actual killing. The rifle is simply a means to deliver the bullet to the target. So, a basic knowledge of bullets seemed to be a prerequisite for studying rifles. As hunters, we put a lot of thought into the tips of our bullets. Roundnoses, spire points, plastic tips and such are all worried over to ensure that the bullet we’re using is right for the game we’re hunting. But have you ever given as much consideration to the other end of your bullet–the base? In the scheme of things, the base of your bullet probably isn’t going to make any more of a difference between a hit or a miss, a clean kill or a wound, than the bullet tip, but it is something to consider if you’re on a once-in–a-lifetime hunt and want to eliminate as many variables as possible that could leave you standing there wondering what went wrong if a trophy animal bounds away seemingly unscathed. There are generally two types of bases on hunting bullets, flat base and boattail. The practical differences between them may not be what you think. Both have their benefits, and their drawbacks. For example, when it comes to pure accuracy, flat base bullets are inherently more accurate than boattails, and that’s why you see the “short range” Benchrest shooters using them. The reason is because it’s easier to make their bases perfectly square with the sides of the bullets than it is to make boattails perfectly concentric and on straight. -

6.5 Creedmoor
RIFLE RELOADING DATA 1 6.5 Creedmoor Test Specifications/ Components Firearm Used: Universal Receiver Barrel Length: 24” Twist: 1-8’’ Case: Hornady Trim-to Length: 1.910’’ Primer: Winchester WLR Remarks: Developed in 2007 by Dennis DeMille and Dave Emary, the 6.5 Creedmoor is a shortened and improved 30 TC cartridge case that was inspired by the .308 Win- chester design. This short action design was created to maximize case capacity and a wide range of loading lengths, while still fitting in standard short action maga- zines. With the correct twist barrel, the ver- satile 6.5 Creedmoor can take advantage of the wide range of bullet weights available in 6.5mm. Reloaders should keep in mind that the 6.5 Creedmoor works best with medium to medium- slow powders such as H4350, Varget, Win 760, and RE-17. The light recoil and adaptability of the efficient 6.5 Creedmoor cartridge has already proven itself in high power, precision rifle series and benchrest competitions. Cou- ple that with respectable barrel life and its intrinsic accuracy potential and you have a recipe for success which should insure its legacy for decades to come. RIFLE RELOADING DATA 2 6.5 Creedmoor #1700 .264” 85 gr. HP C.O.A.L. 2.670” Powderi / Velocity g 2900 3000 3100 3200 3300 3400 3500 IMR 8208 XBR 36.6 37.7 38.9 40.1 41.2 42.4 TAC 36.5 37.9 39.3 40.6 42.0 IMR 4895 37.2 38.4 39.7 40.9 42.2 43.4 IMR 4166 End. -

Basic Reloading Manual
Basic Reloading Manual PRINTED IN USA 2015 The All New Enduron™ Technology Rifle Powders from IMR® Legendary Powders FEATURES • TEMPERATURE INSENSITIVE, BOTH HOT AND COLD • REDUCES COPPER FOULING FROM BUILDING FOR DOZENS OF ROUNDS • SHORT GRAINS FOR EASY METERING • IDEAL BULK DENSITY WITH A FULL CASE IN MOST APPROPRIATE CARTRIDGES • ENVIRONMENTALLY FRIENDLY HAVING NO INGREDIENTS HARMFUL TO THE ENVIRONMENT THE POWDERS IMR 4166™ This fine, extruded powder is the first in the series of Enduron™ Technology powders. IMR 4166 is the perfect burn speed for cartridges like the 308 Win/7.62mm NATO, 22-250 Remington, 257 Roberts and dozens more. IMR 4451™ As a medium burn speed, this Enduron™ Technology powder gives top performance in the venerable 30-06, 270 Winchester and 300 Winchester Short Magnum, to name just a few. IMR 7977™ Ths slowest burn rate Enduron™ Technology powder, IMR 7977 is a true magnum powder. Outstanding performance in the 300 Winchester Magnum, 7mm Remington Magnum and the 338 Lapua Magnum, plus a host of others, is the hallmark of this extruded propellant. Three Powder Reloading Manuals in One Reload Data from THREE powder companies is included in this one reloading manual; Hodgdon, IMR, and Winchester Smokeless Propellants. Data is listed for most popular Rifle, Pistol, and Shotshell cartridges. For the most comprehensive up to date reload data, including the most recent new caliber introductions, go to the Reloading Data Center at hodgdon.com, or call 913-362-9455 for customer service. Contents page Hodgdon New Products . .2 Introduction . 3 Mission Statement Powder Descriptions . .4-5 Hodgdon Powder Company operates following Biblical principles to honor God. -

Sako Cartridges 2020.Pdf
KNOW YOUR GAME We at Sako have a passion for hunting. We firmly believe that it is a truly unique sport, and as such we want to provide you with the perfect cartridge for each situation. Our history started in 1921 from hand-manufactured firearms and we started manufacturing rifle cartridges in 1928. Even though high technology has since been introduced, we strive to maintain that same level of uncompromising craftsmanship. As hunters, the quality of our cartridges is a matter of pride. We utilize modern computer-aided R&D and CNC manufacturing methods and automatic inspection machines, but also examine each individual brass case and cartridge by hand for quality assurance purposes. All Sako cases and bullets are suited for reloading and, with their sturdy quality, are said to outlast the competition. We offer 32 different calibers with more than 100 different loads. All Sako cartridges comply with C.I.P requirements. Choosing the right cartridge is no small thing. It’s all about knowing your rifle, the nature surrounding you and especially the animal you are hunting. To make the selection process easier for you, we have introduced a color- coded categorization for our cartridges. Bonded or non-bonded? Rapid or controlled expansion? You know the basics at a glance, so you never have to struggle with wrong cartridges ever again. With Sako Cartridges you’re entitled to demand perfection. 01 02 03 04 05 OTHER BRANDS 1. DEMAND PERFECTION 3. PRECISION LOADED WITH ONLY THE BEST QUALITY COMPONENTS Making rifles and cartridges is a matter of pride as much as it is about offering hunting enthusiasts the best combined Every bullet and case is individually inspected, the deviation of the cartridge and rifle performance on the market. -

Speer-2018.Pdf
2018 CATALOG For 75 years, Speer ® has been tirelessly serving shooters. Today we offer the world’s finest component bullets and loaded ammunition, including Gold Dot, the No. 1 choice of law enforcement. The original product lines have been expanded and new ones added. But through the changes, our formula for success has been constant. Quality. Precision. Consistency. No matter what type of shooting you do, you will find a perfect option with Speer. AMMUNITION Gold Dot® Personal Protection . 4-5 Lawman® Training. 6-7 COMPONENT BULLETS RIFLE Hunting . 8-9 Varmint................................................10-11 Target & Plinking . 12-13 HANDGUN Hunting & Personal Protection . 14-15 Target & Action......................................... 16-17 SPECIALTY & ACCESSORIES . 18-19 TESTED. PROVEN. TRUSTED. Gold Dot® ammunition’s reliability has made it the No. 1 load for law enforcement, and we offer the same performance to you. Using our exclusive Uni-Cor® method, we bond the jacket to the core one molecule at a time at the very beginning of the bullet construction process. This virtually eliminates core-jacket separation and creates a precision hollow point that is accurate, tough and unbelievably consistent. With options for both standard handguns and short barrels, there’s a Gold Dot load to fit any shooter. Now available in 10mm Auto. CONSTRUCTION 1 2 3 4 The Speer® Gold Dot bullet Gold Dot technology bonds an First stage of patented two- Second forming stage finishes the cavity to begins with an alloyed incredibly uniform jacket to the stage hollow point process match bullet weight and velocity, producing lead core. core—one molecule at a time.