THE EARTH and EARTH COORDINATES Chapter
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-
Navigation and the Global Positioning System (GPS): the Global Positioning System
Navigation and the Global Positioning System (GPS): The Global Positioning System: Few changes of great importance to economics and safety have had more immediate impact and less fanfare than GPS. • GPS has quietly changed everything about how we locate objects and people on the Earth. • GPS is (almost) the final step toward solving one of the great conundrums of human history. Where the heck are we, anyway? In the Beginning……. • To understand what GPS has meant to navigation it is necessary to go back to the beginning. • A quick look at a ‘precision’ map of the world in the 18th century tells one a lot about how accurate our navigation was. Tools of the Trade: • Navigations early tools could only crudely estimate location. • A Sextant (or equivalent) can measure the elevation of something above the horizon. This gives your Latitude. • The Compass could provide you with a measurement of your direction, which combined with distance could tell you Longitude. • For distance…well counting steps (or wheel rotations) was the thing. An Early Triumph: • Using just his feet and a shadow, Eratosthenes determined the diameter of the Earth. • In doing so, he used the last and most elusive of our navigational tools. Time Plenty of Weaknesses: The early tools had many levels of uncertainty that were cumulative in producing poor maps of the world. • Step or wheel rotation counting has an obvious built-in uncertainty. • The Sextant gives latitude, but also requires knowledge of the Earth’s radius to determine the distance between locations. • The compass relies on the assumption that the North Magnetic pole is coincident with North Rotational pole (it’s not!) and that it is a perfect dipole (nope…). -
AS/NZS ISO 6709:2011 ISO 6709:2008 ISO 6709:2008 Cor.1 (2009) AS/NZS ISO 6709:2011 AS/NZS ISO 6709:2011
AS/NZS ISO 6709:2011 ISO 6709:2008 ISO 6709:2008 Cor.1 (2009) AS/NZS ISO 6709:2011AS/NZS ISO Australian/New Zealand Standard™ Standard representation of geographic point location by coordinates AS/NZS ISO 6709:2011 This Joint Australian/New Zealand Standard was prepared by Joint Technical Committee IT-004, Geographical Information/Geomatics. It was approved on behalf of the Council of Standards Australia on 15 November 2011 and on behalf of the Council of Standards New Zealand on 14 November 2011. This Standard was published on 23 December 2011. The following are represented on Committee IT-004: ANZLIC—The Spatial Information Council Australasian Fire and Emergency Service Authorities Council Australian Antarctic Division Australian Hydrographic Office Australian Map Circle CSIRO Exploration and Mining Department of Lands, NSW Department of Primary Industries and Water, Tas. Geoscience Australia Land Information New Zealand Mercury Project Solutions Office of Spatial Data Management The University of Melbourne Keeping Standards up-to-date Standards are living documents which reflect progress in science, technology and systems. To maintain their currency, all Standards are periodically reviewed, and new editions are published. Between editions, amendments may be issued. Standards may also be withdrawn. It is important that readers assure themselves they are using a current Standard, which should include any amendments which may have been published since the Standard was purchased. Detailed information about joint Australian/New Zealand Standards can be found by visiting the Standards Web Shop at www.saiglobal.com.au or Standards New Zealand web site at www.standards.co.nz and looking up the relevant Standard in the on-line catalogue. -

International Standard
International Standard INTERNATIONAL ORGANIZATION FOR STANDARDIZATlON.ME~YHAPO~HAR OPI-AHH3AWlR fl0 CTAH~APTM3Al&lM.ORGANISATION INTERNATIONALE DE NORMALISATION Standard representation of latitude, longitude and altitude for geographic Point locations Reprksen ta tion normalis6e des latitude, longitude et altitude pbur Ia localisa tion des poin ts gkographiques First edition - 1983-05-15i Teh STANDARD PREVIEW (standards.iteh.ai) ISO 6709:1983 https://standards.iteh.ai/catalog/standards/sist/40603644-5feb-4b20-87de- d0a2bddb21d5/iso-6709-1983 UDC 681.3.04 : 528.28 Ref. No. ISO 67094983 (E) Descriptors : data processing, information interchange, geographic coordinates, representation of data. Price based on 3 pages Foreword ISO (the International Organization for Standardization) is a worldwide federation of national Standards bodies (ISO member bedies). The work of developing International Standards is carried out through ISO technical committees. Every member body interested in a subject for which a technical committee has been authorized has the right to be represented on that committee. International organizations, governmental and non-governmental, in liaison with ISO, also take part in the work. Draft International Standards adopted by the technical committees are circulated to the member bodies for approval before their acceptance as International Standards by the ISO Council. International Standard ISO 6709 was developediTeh Sby TTechnicalAN DCommitteeAR DISO/TC PR 97,E VIEW Information processing s ystems, and was circulated to the member bodies in November 1981. (standards.iteh.ai) lt has been approved by the member bodies of the following IcountriesSO 6709 :1: 983 https://standards.iteh.ai/catalog/standards/sist/40603644-5feb-4b20-87de- Belgium France d0a2bddRomaniab21d5/is o-6709-1983 Canada Germany, F. -

TYPHOONS and DEPRESSIONS OVER the FAR EAST Morning Observation, Sep Teinber 6, from Rasa Jima Island by BERNARDF
SEPTEMBER1940 MONTHLY WEATHER REVIEW 257 days west of the 180th meridian. In American coastal appear to be independent of the typhoon of August 28- waters fog was noted on 10 days each off Washington and September 5, are the following: The S. S. Steel Exporter California; on 4 days off Oregon; and on 3 days off Lower reported 0700 G. C. T. September 6, from latitude 20'18' California. N., longitude 129'30'E.) a pressure of 744.8 mm. (993.0 nib.) with west-northwest winds of force 9. Also, the TYPHOONS AND DEPRESSIONS OVER THE FAR EAST morning observation, Sep teinber 6, from Rasa Jima Island By BERNARDF. DOUCETTE, J. (one of the Nansei Island group) was 747.8 mm. (997.0 5. mb.) for pressure and east-northeast, force 4, for winds. [Weather Bureau, Manila, P. I.] Typhoon, September 11-19) 1940.-A depression, moving Typhoon, August %!-September 6,1940.-A low-pressure westerly, passed about 200 miles south of Guam and area far to the southeast of Guam moved west-northwest, quickly inclined to the north, intensifying to typhoon rapidly developing to typhoon intensity as it proceeded. strength, September 11 to 13. It was stationary, Sep- When the center reached the regions about 250 miles tember 13 and 14, about 150 miles west-northwest of west of Guam, the direction changed to the northwest, Guam, and then began a northwesterly and northerly and the storm continued along this course until it reached course to the ocean regions about 300 miles west of the the latitude of southern Formosa. -
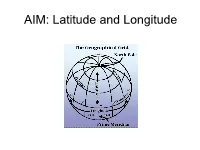
AIM: Latitude and Longitude
AIM: Latitude and Longitude Latitude lines run east/west but they measure north or south of the equator (0°) splitting the earth into the Northern Hemisphere and Southern Hemisphere. Latitude North Pole 90 80 Lines of 70 60 latitude are 50 numbered 40 30 from 0° at 20 Lines of [ 10 the equator latitude are 10 to 90° N.L. 20 numbered 30 at the North from 0° at 40 Pole. 50 the equator ] 60 to 90° S.L. 70 80 at the 90 South Pole. South Pole Latitude The North Pole is at 90° N 40° N is the 40° The equator is at 0° line of latitude north of the latitude. It is neither equator. north nor south. It is at the center 40° S is the 40° between line of latitude north and The South Pole is at 90° S south of the south. equator. Longitude Lines of longitude begin at the Prime Meridian. 60° W is the 60° E is the 60° line of 60° line of longitude west longitude of the Prime east of the W E Prime Meridian. Meridian. The Prime Meridian is located at 0°. It is neither east or west 180° N Longitude West Longitude West East Longitude North Pole W E PRIME MERIDIAN S Lines of longitude are numbered east from the Prime Meridian to the 180° line and west from the Prime Meridian to the 180° line. Prime Meridian The Prime Meridian (0°) and the 180° line split the earth into the Western Hemisphere and Eastern Hemisphere. Prime Meridian Western Eastern Hemisphere Hemisphere Places located east of the Prime Meridian have an east longitude (E) address. -

Ts 144 031 V12.3.0 (2015-07)
ETSI TS 1144 031 V12.3.0 (201515-07) TECHNICAL SPECIFICATION Digital cellular telecocommunications system (Phahase 2+); Locatcation Services (LCS); Mobile Station (MS) - SeServing Mobile Location Centntre (SMLC) Radio Resosource LCS Protocol (RRLP) (3GPP TS 44.0.031 version 12.3.0 Release 12) R GLOBAL SYSTTEM FOR MOBILE COMMUNUNICATIONS 3GPP TS 44.031 version 12.3.0 Release 12 1 ETSI TS 144 031 V12.3.0 (2015-07) Reference RTS/TSGG-0244031vc30 Keywords GSM ETSI 650 Route des Lucioles F-06921 Sophia Antipolis Cedex - FRANCE Tel.: +33 4 92 94 42 00 Fax: +33 4 93 65 47 16 Siret N° 348 623 562 00017 - NAF 742 C Association à but non lucratif enregistrée à la Sous-Préfecture de Grasse (06) N° 7803/88 Important notice The present document can be downloaded from: http://www.etsi.org/standards-search The present document may be made available in electronic versions and/or in print. The content of any electronic and/or print versions of the present document shall not be modified without the prior written authorization of ETSI. In case of any existing or perceived difference in contents between such versions and/or in print, the only prevailing document is the print of the Portable Document Format (PDF) version kept on a specific network drive within ETSI Secretariat. Users of the present document should be aware that the document may be subject to revision or change of status. Information on the current status of this and other ETSI documents is available at http://portal.etsi.org/tb/status/status.asp If you find errors in the present document, please send your comment to one of the following services: https://portal.etsi.org/People/CommiteeSupportStaff.aspx Copyright Notification No part may be reproduced or utilized in any form or by any means, electronic or mechanical, including photocopying and microfilm except as authorized by written permission of ETSI. -

Download/Pdf/Ps-Is-Qzss/Ps-Qzss-001.Pdf (Accessed on 15 June 2021)
remote sensing Article Design and Performance Analysis of BDS-3 Integrity Concept Cheng Liu 1, Yueling Cao 2, Gong Zhang 3, Weiguang Gao 1,*, Ying Chen 1, Jun Lu 1, Chonghua Liu 4, Haitao Zhao 4 and Fang Li 5 1 Beijing Institute of Tracking and Telecommunication Technology, Beijing 100094, China; [email protected] (C.L.); [email protected] (Y.C.); [email protected] (J.L.) 2 Shanghai Astronomical Observatory, Chinese Academy of Sciences, Shanghai 200030, China; [email protected] 3 Institute of Telecommunication and Navigation, CAST, Beijing 100094, China; [email protected] 4 Beijing Institute of Spacecraft System Engineering, Beijing 100094, China; [email protected] (C.L.); [email protected] (H.Z.) 5 National Astronomical Observatories, Chinese Academy of Sciences, Beijing 100094, China; [email protected] * Correspondence: [email protected] Abstract: Compared to the BeiDou regional navigation satellite system (BDS-2), the BeiDou global navigation satellite system (BDS-3) carried out a brand new integrity concept design and construction work, which defines and achieves the integrity functions for major civil open services (OS) signals such as B1C, B2a, and B1I. The integrity definition and calculation method of BDS-3 are introduced. The fault tree model for satellite signal-in-space (SIS) is used, to decompose and obtain the integrity risk bottom events. In response to the weakness in the space and ground segments of the system, a variety of integrity monitoring measures have been taken. On this basis, the design values for the new B1C/B2a signal and the original B1I signal are proposed, which are 0.9 × 10−5 and 0.8 × 10−5, respectively. -

Part V: the Global Positioning System ______
PART V: THE GLOBAL POSITIONING SYSTEM ______________________________________________________________________________ 5.1 Background The Global Positioning System (GPS) is a satellite based, passive, three dimensional navigational system operated and maintained by the Department of Defense (DOD) having the primary purpose of supporting tactical and strategic military operations. Like many systems initially designed for military purposes, GPS has been found to be an indispensable tool for many civilian applications, not the least of which are surveying and mapping uses. There are currently three general modes that GPS users have adopted: absolute, differential and relative. Absolute GPS can best be described by a single user occupying a single point with a single receiver. Typically a lower grade receiver using only the coarse acquisition code generated by the satellites is used and errors can approach the 100m range. While absolute GPS will not support typical MDOT survey requirements it may be very useful in reconnaissance work. Differential GPS or DGPS employs a base receiver transmitting differential corrections to a roving receiver. It, too, only makes use of the coarse acquisition code. Accuracies are typically in the sub- meter range. DGPS may be of use in certain mapping applications such as topographic or hydrographic surveys. DGPS should not be confused with Real Time Kinematic or RTK GPS surveying. Relative GPS surveying employs multiple receivers simultaneously observing multiple points and makes use of carrier phase measurements. Relative positioning is less concerned with the absolute positions of the occupied points than with the relative vector (dX, dY, dZ) between them. 5.2 GPS Segments The Global Positioning System is made of three segments: the Space Segment, the Control Segment and the User Segment. -

Reference Systems for Surveying and Mapping Lecture Notes
Delft University of Technology Reference Systems for Surveying and Mapping Lecture notes Hans van der Marel ii The front cover shows the NAP (Amsterdam Ordnance Datum) ”datum point” at the Stopera, Amsterdam (picture M.M.Minderhoud, Wikipedia/Michiel1972). H. van der Marel Lecture notes on Reference Systems for Surveying and Mapping: CTB3310 Surveying and Mapping CTB3425 Monitoring and Stability of Dikes and Embankments CIE4606 Geodesy and Remote Sensing CIE4614 Land Surveying and Civil Infrastructure February 2020 Publisher: Faculty of Civil Engineering and Geosciences Delft University of Technology P.O. Box 5048 Stevinweg 1 2628 CN Delft The Netherlands Copyright ©20142020 by H. van der Marel The content in these lecture notes, except for material credited to third parties, is licensed under a Creative Commons AttributionsNonCommercialSharedAlike 4.0 International License (CC BYNCSA). Third party material is shared under its own license and attribution. The text has been type set using the MikTex 2.9 implementation of LATEX. Graphs and diagrams were produced, if not mentioned otherwise, with Matlab and Inkscape. Preface This reader on reference systems for surveying and mapping has been initially compiled for the course Surveying and Mapping (CTB3310) in the 3rd year of the BScprogram for Civil Engineering. The reader is aimed at students at the end of their BSc program or at the start of their MSc program, and is used in several courses at Delft University of Technology. With the advent of the Global Positioning System (GPS) technology in mobile (smart) phones and other navigational devices almost anyone, anywhere on Earth, and at any time, can determine a three–dimensional position accurate to a few meters. -

Models for Earth and Maps
Earth Models and Maps James R. Clynch, Naval Postgraduate School, 2002 I. Earth Models Maps are just a model of the world, or a small part of it. This is true if the model is a globe of the entire world, a paper chart of a harbor or a digital database of streets in San Francisco. A model of the earth is needed to convert measurements made on the curved earth to maps or databases. Each model has advantages and disadvantages. Each is usually in error at some level of accuracy. Some of these error are due to the nature of the model, not the measurements used to make the model. Three are three common models of the earth, the spherical (or globe) model, the ellipsoidal model, and the real earth model. The spherical model is the form encountered in elementary discussions. It is quite good for some approximations. The world is approximately a sphere. The sphere is the shape that minimizes the potential energy of the gravitational attraction of all the little mass elements for each other. The direction of gravity is toward the center of the earth. This is how we define down. It is the direction that a string takes when a weight is at one end - that is a plumb bob. A spirit level will define the horizontal which is perpendicular to up-down. The ellipsoidal model is a better representation of the earth because the earth rotates. This generates other forces on the mass elements and distorts the shape. The minimum energy form is now an ellipse rotated about the polar axis. -

The Evolution of Earth Gravitational Models Used in Astrodynamics
JEROME R. VETTER THE EVOLUTION OF EARTH GRAVITATIONAL MODELS USED IN ASTRODYNAMICS Earth gravitational models derived from the earliest ground-based tracking systems used for Sputnik and the Transit Navy Navigation Satellite System have evolved to models that use data from the Joint United States-French Ocean Topography Experiment Satellite (Topex/Poseidon) and the Global Positioning System of satellites. This article summarizes the history of the tracking and instrumentation systems used, discusses the limitations and constraints of these systems, and reviews past and current techniques for estimating gravity and processing large batches of diverse data types. Current models continue to be improved; the latest model improvements and plans for future systems are discussed. Contemporary gravitational models used within the astrodynamics community are described, and their performance is compared numerically. The use of these models for solid Earth geophysics, space geophysics, oceanography, geology, and related Earth science disciplines becomes particularly attractive as the statistical confidence of the models improves and as the models are validated over certain spatial resolutions of the geodetic spectrum. INTRODUCTION Before the development of satellite technology, the Earth orbit. Of these, five were still orbiting the Earth techniques used to observe the Earth's gravitational field when the satellites of the Transit Navy Navigational Sat were restricted to terrestrial gravimetry. Measurements of ellite System (NNSS) were launched starting in 1960. The gravity were adequate only over sparse areas of the Sputniks were all launched into near-critical orbit incli world. Moreover, because gravity profiles over the nations of about 65°. (The critical inclination is defined oceans were inadequate, the gravity field could not be as that inclination, 1= 63 °26', where gravitational pertur meaningfully estimated. -

Anaximander and the Problem of the Earth's Immobility
Binghamton University The Open Repository @ Binghamton (The ORB) The Society for Ancient Greek Philosophy Newsletter 12-28-1953 Anaximander and the Problem of the Earth's Immobility John Robinson Windham College Follow this and additional works at: https://orb.binghamton.edu/sagp Recommended Citation Robinson, John, "Anaximander and the Problem of the Earth's Immobility" (1953). The Society for Ancient Greek Philosophy Newsletter. 263. https://orb.binghamton.edu/sagp/263 This Article is brought to you for free and open access by The Open Repository @ Binghamton (The ORB). It has been accepted for inclusion in The Society for Ancient Greek Philosophy Newsletter by an authorized administrator of The Open Repository @ Binghamton (The ORB). For more information, please contact [email protected]. JOHN ROBINSON Windham College Anaximander and the Problem of the Earth’s Immobility* N the course of his review of the reasons given by his predecessors for the earth’s immobility, Aristotle states that “some” attribute it I neither to the action of the whirl nor to the air beneath’s hindering its falling : These are the causes with which most thinkers busy themselves. But there are some who say, like Anaximander among the ancients, that it stays where it is because of its “indifference” (όμοιότητα). For what is stationed at the center, and is equably related to the extremes, has no reason to go one way rather than another—either up or down or sideways. And since it is impossible for it to move simultaneously in opposite directions, it necessarily stays where it is.1 The ascription of this curious view to Anaximander appears to have occasioned little uneasiness among modern commentators.