Evolutionary Deep Learning to Identify Galaxies in the Zone of Avoidance
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Large Scale Structure in the Local Universe — the 2MASS Galaxy Catalog
Structure and Dynamics in the Local Universe CSIRO PUBLISHING Publications of the Astronomical Society of Australia, 2004, 21, 396–403 www.publish.csiro.au/journals/pasa Large Scale Structure in the Local Universe — The 2MASS Galaxy Catalog Thomas JarrettA A Infrared Processing and Analysis Center, MS 100-22, California Institute of Technology, Pasadena, CA 91125, USA. Email: [email protected] Received 2004 May 3, accepted 2004 October 12 Abstract: Using twin ground-based telescopes, the Two-Micron All Sky Survey (2MASS) scanned both equatorial hemispheres, detecting more than 500 million stars and resolving more than 1.5 million galaxies in the near-infrared (1–2.2 µm) bands. The Extended Source Catalog (XSC) embodies both photometric and astrometric whole sky uniformity, revealing large scale structures in the local Universe and extending our view into the Milky Way’s dust-obscured ‘Zone of Avoidance’. The XSC represents a uniquely unbiased sample of nearby galaxies, particularly sensitive to the underlying, dominant, stellar mass component of galaxies. The basic properties of the XSC, including photometric sensitivity, source counts, and spatial distribution, are presented here. Finally, we employ a photometric redshift technique to add depth to the spatial maps, reconstructing the cosmic web of superclusters spanning the sky. Keywords: general: galaxies — fundamental parameters: infrared — galaxies: clusters — surveys: astronomical 1 Introduction 2003), distance indicators (e.g. Karachentsev et al. 2002), Our understanding of the origin and evolution of the Uni- angular correlation functions (e.g. Maller et al. 2003a), and verse has been fundamentally transformed with seminal the dipole of the local Universe (e.g. -
Observations of New Galaxies in the Zone of Avoidance Using the Arecibo Radio Telescope R
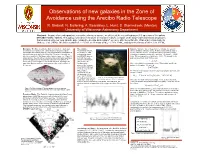
Observations of new galaxies in the Zone of Avoidance using the Arecibo Radio Telescope R. Birdsall, N. Ballering, A. Beardsley, L. Hunt, S. Stanimirovic (Mentor) University of Wisconsin Astronomy Department Abstract: As part of an undergraduate research techniques course, we detected the neutral hydrogen (HI) spectrum of the galaxy SPITZER192404+145632. This galaxy is located in the Zone of Avoidance (ZoA), a region of the large-scale distribution of galaxies that is obscured by our own galactic disk. Using the Arecibo Observatory*, we were able to confirm the infrared detection made by 9 11 Marleau et al. (2008). We find a redshift of z = 0.019, an HI mass of MHI = 1.02 x 10 Mo, and dynamical mass of MT ≈ 3.9 x 10 Mo. Motivation: The Zone of avoidance (ZoA) is located in the night sky in Observations: Analysis: Using the observed spectrum, we calculate the systemic the direction of our galactic disk. Observations of galaxies at optical We observed remotely velocity, distance, rotational velocity, HI mass, and dynamical mass of wavelengths are extremely difficult in this region because of absorption of on October 16, 2008, SPITZER192404+145632. The systemic velocity is found by simply light by the dust in the disk of the Milky Way. Therefore, fewer objects using position switch- evaluating the midpoint velocity of the spectrum. We found vsys = 5800 have been found in the ZoA than in other regions of space (see Figure 1). ing (ON/OFF) observa- km/s. This corresponds to a redshift of z = 0.019. The distance to the Observations in the ZoA with very sensitive infrared and radio telescopes, tions with the L-wide galaxy is determined using Hubble’s Law: present an opportunity for astronomers to discover new galaxies, as receiver of the Arecibo waves at these wavelengths are not absorbed by dust. -

OBSERVATIONS in the ZONE of AVOIDANCE USING ARECIBO OBSERVATORY R.Birdsall, N.Ballering, A.Beardsley, L.Hunt, R.Wilson, S.Stanim
OBSERVATIONS IN THE ZONE OF AVOIDANCE USING ARECIBO OBSERVATORY R.Birdsall, N.Ballering, A.Beardsley, L.Hunt, R.Wilson, S.Stanimi 1. Abstract The Zone of Avoidance is a relatively unknown region of space that lies on the other side of our galactic disk. Previous observations made by other collaborators such as Galactic Legacy Infrared Mid-Plane Survey Extraordinaire (GLIMPSE) and MIPS Galactic Plane Survey (MIPSGAL) which surveyed the Zone of Avoidance in the infrared spectrum with the Spitzer Space Telescope.[1] Our team decided to focus on target objects observed by the (GLIMPSE) and(MIPSGAL). These two collaborations identified twenty five new objects in the Infrared Spectrum that had the properties of galaxy like objects. For that reason, we used the Arecibo Radio Observatory in the hopes of detecting the radio signal of neutral hydrogen and identifying these objects. This piece focuses on SP192404+1456 2. Zone of Avoidance The Zone of Avoidance is a interesting region of the night sky because very little is known about what occupies that space. The ZOA is the region of the sky that lies beyond in the direction of the Milky Way galactic center. Thus EM radiation sources from the ZOA must make its way through the galactic disk. This makes detection of these galaxies difficult to near impossible. Both GLIMPSE and MIPSGAL where able to detect twenty-five obscure objects in the IR part of the spectrum, but where unable to verify exact source parameters. 1 2 OBSERVATIONS IN THE ZONE OF AVOIDANCE USING ARECIBO OBSERVATORY [2] In Figure 1. we see a spacial map of previous galactic survey's. -

Predicting Structures in the Zone of Avoidance
Mon. Not. R. Astron. Soc. 000, 1–11 (2017) Printed 8 October 2018 (MN LATEX style file v2.2) Predicting Structures in the Zone of Avoidance Jenny G. Sorce1,2⋆, Matthew Colless3, Renee´ C. Kraan-Korteweg4, Stefan Gottlober¨ 2 1Universit´ede Strasbourg, CNRS, Observatoire astronomique de Strasbourg, UMR 7550, F-67000 Strasbourg, France 2Leibniz-Institut f¨ur Astrophysik, 14482 Potsdam, Germany 3Research School of Astronomy and Astrophysics, Australian National University, Canberra, ACT 2611, Australia 4Department of Astronomy, University of Cape Town, 7700 Rondebosch, South Africa ABSTRACT The Zone of Avoidance (ZOA), whose emptiness is an artifact of our Galaxy dust, has been challenging observers as well as theorists for many years. Multiple attempts have been made on the observational side to map this region in order to better understand the local flows. On the the- oretical side, however, this region is often simply statistically populated with structures but no real attempt has been made to confront theoretical and observed matter distributions. This paper takes a step forward using constrained realizations of the local Universe shown to be perfect substitutes of local Universe-like simulations for smoothed high density peak studies. Far from generating com- pletely ‘random’ structures in the ZOA, the reconstruction technique arranges matter according to the surrounding environment of this region. More precisely, the mean distributions of structures in a series of constrained and random realizations differ: while densities annihilate each other when averaging over 200 random realizations, structures persist when summing 200 constrained realiza- tions. The probability distribution function of ZOA grid cells to be highly overdense is a Gaussian with a 15% mean in the random case, while that of the constrained case exhibits large tails. -

Mapping the Hidden Universe: the Galaxy Distribution in the Zone of Avoidance
Publ. Astron. Soc. Aust., 2000, 17, 6–12. Mapping the Hidden Universe: The Galaxy Distribution in the Zone of Avoidance Renee C. Kraan-Korteweg1 and Sebastian Juraszek2,3 1Departamento de Astronoma, Universidad de Guanajuato, Apartado Postal 144, Guanajuato GTO 36000, Mexico [email protected] 2School of Physics, University of Sydney, NSW 2006, Australia 3ATNF, CSIRO, PO Box 76, Epping, NSW 2121, Australia [email protected] Received 1999 August 26, accepted 1999 October 26 Abstract: Due to the foreground extinction of the Milky Way, galaxies become increasingly faint as they approach the Galactic Equator creating a ‘zone of avoidance’ (ZOA) in the distribution of optically visible galaxies of about 25%. A ‘whole-sky’ map of galaxies is essential, however, for understanding the dynamics in our local Universe, in particular the peculiar velocity of the Local Group with respect to the Cosmic Microwave Background and velocity ow elds such as in the Great Attractor (GA) region. The current status of deep optical galaxy searches behind the Milky Way and their completeness as a function of foreground extinction will be reviewed. It has been shown that these surveys—which in the mean time cover the whole ZOA (Figure 2)—result in a considerable reduction of the ZOA from extinction levels of m m AB =10 (Figure 1) to AB =30 (Figure 3). In the remaining, optically opaque ZOA, systematic HI surveys are powerful in uncovering galaxies, as is demonstrated for the GA region with data from the full sensitivity Parkes Multibeam HI survey (300 ` 332, |b|55, Figure 4). Keywords: zone of avoidance — surveys — ISM: dust, extinction — large-scale structure of universe 1 Introduction presented in an Aito equal-area projection centred on the Galactic plane. -

A Kinematic Confirmation of the Hidden Vela Supercluster
MNRAS 000,1{6 (2019) Preprint 20 September 2019 Compiled using MNRAS LATEX style file v3.0 A kinematic confirmation of the hidden Vela supercluster H´el`ene M. Courtois1?, Ren´ee C. Kraan-Korteweg2, Alexandra Dupuy1, Romain Graziani1 and Noam I. Libeskind,1;3 1University of Lyon, UCB Lyon 1, CNRS/IN2P3, IP2I Lyon, France 2Department of Astronomy, University of Cape Town, Private Bag X3, 7701 Rondebosch, South Africa 3Leibniz-Institut fur¨ Astrophysik Potsdam (AIP), An der Sternwarte 16, D-14482 Potsdam, Germany Accepted....... ; ABSTRACT The universe region obscured by the Milky Way is very large and only future blind large HI redshift, and targeted peculiar surveys on the outer borders will determine how much mass is hidden there. Meanwhile, we apply for the first time two independent techniques to the galaxy peculiar velocity catalog CosmicF lows−3 in order to explore for the kinematic signature of a specific large-scale structure hidden behind this zone : the Vela supercluster at cz ∼ 18; 000,km s−1 . Using the gravitational velocity and density contrast fields, we find excellent agreement when comparing our results to the Vela object as traced in redshift space. The article provides the first kinematic evidence of a major mass concentration (knot of the Cosmic Web) located in the direction behind Vela constellation, pin-pointing that the Zone of Avoidance should be surveyed in detail in the future . Key words: large-scale structure of Universe 1 INTRODUCTION (sgl; sgb ∼ 173◦; −47◦)(Kraan-Korteweg et al.(2017, 2015), henceforth KK17a,b). A significant bulk flow residual was revealed in 2014 in the Radial peculiar velocities can be modeled using the analysis of the 6dF peculiar velocity survey based on 8,885 Wiener filter methodology Zaroubi et al.(1999); Hoffman galaxies in the southern hemisphere within a volume cz (2009); Courtois et al.(2012), recently re-vamped by data ≤ 16; 000 km s−1 Springob et al.(2014). -

Serendipitious 2MASS Discoveries Near the Galactic Plane
Serendipitous 2MASS Discoveries Near the Galactic Plane: A Spiral Galaxy and Two Globular Clusters Robert L. Hurt, Tom H. Jarrett, J. Davy Kirkpatrick, Roc M. Cutri Infrared Processing & Analysis Center, MS 100-22, California Institute of Technology, Jet Propulsion Laboratory, Pasadena, CA 91125 [email protected], [email protected], [email protected], [email protected] Stephen E. Schneider, Mike Skrutskie Astronomy Program, University of Massachusetts, Amherst, MA 01003 [email protected], [email protected] Willem van Driel United Scientifique Nançay, Obs. de Paris–Meudon, Meudon Cedex, CA 92195, France [email protected] Abstract We present the basic properties of three objects near the Galactic Plane—a large galaxy and two candidate globular clusters—discovered in the Two Micron All Sky Survey (2MASS) dataset. All were noted during spot-checks of the data during 2MASS quality assurance reviews. The galaxy is a late-type spiral galaxy (Sc–Sd), ~11 Mpc distant, at l = 236.82°, b = -1.86°. From its observed angular extent of 6.3' in the near infrared, we estimate an extinction-corrected optical diameter of ~9.5', making it larger than most Messier galaxies. The candidate globular clusters are ~2–3’ in extent and are hidden optically behind foreground extinctions of Av ~18–21 mag at l ~ 10°, b ~ 0°. These chance discoveries were not the result of any kind of systematic search but they do hint at the wealth of obscured sources of all kinds, many previously unknown, that are in the 2MASS dataset. Key words: galaxies: photometry—galaxies: spiral—(Galaxy:) globular clusters: general—surveys—infrared radiation 1. -

The HI Parkes Zone of Avoidance Shallow Survey
Publ. Astron. Soc. Aust., 1999, 16, 35–7 . The HI Parkes Zone of Avoidance Shallow Survey P. A. Henning1, L. Staveley-Smith2, R. C. Kraan-Korteweg3 and E. M. Sadler4 1 Institute for Astrophysics, University of New Mexico, Albuquerque, NM, 87131, USA [email protected] 2 Australia Telescope National Facility, CSIRO, PO Box 76, Epping, NSW 1710, Australia [email protected] 3 Departamento de Astronomia, Universidad de Guanajuato, Guanajuato, GTO, CP 36000, Mexico [email protected] 4 School of Physics, University of Sydney, NSW 2006, Australia [email protected] Received 1998 November 2, accepted 1999 January 22 Abstract: The HI Parkes Zone of Avoidance Survey is a 21 cm blind search with the multibeam receiver on the 64-m radiotelescope, looking for galaxies hidden behind the southern Milky Way. The rst, shallow (15 mJy rms) phase of the survey has uncovered 107 galaxies, two-thirds of which were previously unknown. The addition of these galaxies to existing extragalactic catalogues allows the connectivity of a very long, thin lament across the Zone of Avoidance within 3500 km s1 to become evident. No local, hidden, very massive objects were uncovered. With similar results in the north (the Dwingeloo Obscured Galaxies Survey) our census of the most dynamically important HI-rich nearby galaxies is now complete, at least for those objects whose HI proles are not totally buried in the Galactic HI signal. Tests are being devised to better quantify this remaining ZOA for blind HI searches. The full survey is ongoing, and is expected to produce a catalogue of thousands of objects when it is nished. -

Download PDF of Abstracts
15th HEAD Naples, FL – April, 2016 Meeting Program Session Table of Contents 100 – AGN I Analysis Poster Session 206 – Early Results from the Astro-H 101 – Galaxy Clusters 116 – Missions & Instruments Poster Mission 102 – Dissertation Prize Talk: Accretion Session 207 – Stellar Compact II driven outflows across the black hole mass 117 – Solar and Stellar Poster Session 300 – The Physics of Accretion Disks – A scale, Ashley King (KIPAC/Stanford 118 – Supernovae and Supernova Joint HEAD/LAD Session University) Remnants Poster Session 301 – Gravitational Waves 103 – Time Domain Astronomy 119 – WDs & CVs Poster Session 302 – Missions & Instruments 104 – Feedback from Accreting Binaries in 120 – XRBs and Population Surveys Poster 303 – Mid-Career Prize Talk: In the Ring Cosmological Scales Session with Circinus X-1: A Three-Round Struggle 105 – Stellar Compact I 200 – Solar Wind Charge Exchange: to Reveal its Secrets, Sebastian Heinz 106 – AGNs Poster Session Measurements and Models (Univ. of Wisconsin) 107 – Astroparticles, Cosmic Rays, and 201 – TeraGauss, Gigatons, and 304 – Science of X-ray Polarimetry in the Neutrinos Poster Session MegaKelvin: Theory and Observations of 21st Century 108 – Cosmic Backgrounds and Deep Accretion Column Physics 305 – Making the Multimessenger – EM Surveys Poster Session 202 – The Structure of the Inner Accretion Connection 109 – Galactic Black Holes Poster Session Flow of Stellar-Mass and Supermassive 306 – SNR/GRB/Gravitational Waves 110 – Galaxies and ISM Poster Session Black Holes 400 – AGN II 111 – Galaxy -
![Arxiv:1406.6065V1 [Astro-Ph.GA] 23 Jun 2014 Dynamically Hot Stellar Systems in the Mass–Size Plane](https://docslib.b-cdn.net/cover/1912/arxiv-1406-6065v1-astro-ph-ga-23-jun-2014-dynamically-hot-stellar-systems-in-the-mass-size-plane-2361912.webp)
Arxiv:1406.6065V1 [Astro-Ph.GA] 23 Jun 2014 Dynamically Hot Stellar Systems in the Mass–Size Plane
Mon. Not. R. Astron. Soc. 000, 1{25 (2014) Printed 25 June 2014 (MN LATEX style file v2.2) The AIMSS Project I: Bridging the Star Cluster - Galaxy Divide? y z x { Mark A. Norris1;2k, Sheila J. Kannappan2, Duncan A. Forbes3, Aaron J. Romanowsky4;5, Jean P. Brodie5, Favio Ra´ulFaifer6;7, Avon Huxor8, Claudia Maraston9, Amanda J. Moffett2, Samantha J. Penny10, Vincenzo Pota3, Anal´ıaSmith-Castelli6;7, Jay Strader11, David Bradley2, Kathleen D. Eckert2, Dora Fohring12;13, JoEllen McBride2, David V. Stark2, Ovidiu Vaduvescu12 1 Max Planck Institut f¨urAstronomie, K¨onigstuhl17, D-69117, Heidelberg, Germany 2 Dept. of Physics and Astronomy UNC-Chapel Hill, CB 3255, Phillips Hall, Chapel Hill, NC 27599-3255, USA 3 Centre for Astrophysics & Supercomputing, Swinburne University, Hawthorn, VIC 3122, Australia 4 Department of Physics and Astronomy, San Jos´eState University, One Washington Square, San Jose, CA 95192, USA 5 University of California Observatories, 1156 High Street, Santa Cruz, CA 95064, USA 6 Facultad de Ciencias Astron´omicas y Geof´ısicas, Universidad Nacional de La Plata, Paseo del Bosque, B1900FWA, La Plata, Argentina 7 Instituto de Astrof´ısica de La Plata (CCT-La Plata, CONICET-UNLP), Paseo del Bosque, B1900FWA, La Plata, Argentina 8 Astronomisches Rechen-Institut, Zentrum f¨urAstronomie der Universit¨atHeidelberg, M¨onchstraße 12-14, D-69120 Heidelberg, Germany 9 Institute of Cosmology and Gravitation, Dennis Sciama Building, Burnaby Road, Portsmouth PO1 3FX 10 School of Physics, Monash University, Clayton, Victoria 3800, Australia 11 Department of Physics and Astronomy, Michigan State University, East Lansing, Michigan 48824, USA 12 Isaac Newton Group of Telescopes, Apto. -

The Dusty Universe
The Dusty Universe Joe Weingartner (George Mason University) Our Milky Way Galaxy: a spiral galaxy M 83 NGC 4565 The Stellar Disk Radius ≈ 15 kpc (50,000 light-years) Most stars lie within ~ 300 pc of the midplane ~ 11 ~ 11 10 stars with total mass 10 M⊙ The Sun is about 8 kpc from the Galactic Center and 15 to 30 pc above the midplane. Striking evidence of the plane geometry of our galaxy in the night sky: the Milky Way band 1610: Galileo discovers the Milky Way is made up of stars 1750: Thomas Wright suggests a plane geometry of stars 1755: Kant elaborates and suggests that spiral nebulae are distant, rotating systems like the Milky Way The Interstellar Medium (ISM) Total mass ≈ 10% of that in stars Consists primarily of gas (dominated by H) Average H number density at Sun©s distance from Galactic Center: -3 n ≈ 1 cm H Regions of the ISM are categorized by the form of H: atomic, ionized, molecular 2 phases of atomic H: cool (T ~ 100 K, n ~ 30 cm-3) and H warm (T ~ 6000 K, n ~ 0.3 cm-3) H Dust accounts for ≈ 1% of the mass of the ISM Household dust: dead skin cells, clothing and paper fibers, pollen and other plant material, soil particles, dust mites and their feces (particle sizes < 500 m) Interstellar dust: Solid grains < 1 m in size; dominated by silicate and carbonaceous materials The ISM is much less conspicuous than stars: extremely low density => low surface brightness ISM emits largely in radio, infrared But, dust absorbs strongly in the visible; is responsible for the dark patches and rifts in the Milky Way (though not understood until the early 1900s). -

The Arecibo L-Band Feed Array Zone of Avoidance (ALFAZOA) Shallow Survey
Draft version October 15, 2019 Typeset using LATEX twocolumn style in AASTeX62 The Arecibo L-band Feed Array Zone of Avoidance (ALFAZOA) Shallow Survey M. Sanchez-Barrantes,1, 2 P. A. Henning,1 T. McIntyre,3 E. Momjian,2 R. Minchin,4 J.L Rosenberg,5 S. Schneider,6 L. Staveley-Smith,7, 8 W. van Driel,9 M. Ramatsoku,10 Z. Butcher,6 and E. Vaez7 1Department of Physics and Astronomy, University of New Mexico, 1919 Lomas Blvd. NE, Albuquerque, NM 87131, USA 2National Radio Astronomy Observatory, P.O. Box 0, Socorro, NM 87801, USA 3The Pew Charitable Trusts, 901 E Street NW, Washington, DC 20004 a 4Infrared Astronomy/USRA, NASA Ames Research Center, MS 232-12, Moffett Field, CA 94035, USA 5George Mason University, Department of Physics and Astronomy, 4400 University Drive, Fairfax, VA 22030 6University of Massachusetts, Department of Astronomy, 619E LGRT-B, 01003, Amherst, MA, USA 7International Centre for Radio Astronomy Research, University of Western Australia, Crawley, WA 6009, Australia 8ARC Centre of Excellence for All Sky Astrophysics in 3 Dimensions (ASTRO 3D) 9GEPI, Observatoire de Paris, PSL Research University, CNRS, 5 place Jules Janssen, 92190 Meudon, France 10INAF-Osservatorio Astronomico di Cagliari, Via della Scienza 5, 09047 Selargius (CA), Italy ABSTRACT The Arecibo L-band Feed Array Zone of Avoidance (ALFAZOA) Shallow Survey is a blind Hi survey of the extragalactic sky behind the northern Milky Way conducted with the ALFA receiver on the 305m Arecibo Radio Telescope. ALFAZOA Shallow covered 900 square degrees at full sensitivity from 30◦≤ l ≤ 75◦ and jbj ≤ 10◦ and an additional 460 square degrees at limited sensitivity at latitudes up to 20◦.