3 D Cad Approach for Vector Graphics
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Mathematics Is a Gentleman's Art: Analysis and Synthesis in American College Geometry Teaching, 1790-1840 Amy K
Iowa State University Capstones, Theses and Retrospective Theses and Dissertations Dissertations 2000 Mathematics is a gentleman's art: Analysis and synthesis in American college geometry teaching, 1790-1840 Amy K. Ackerberg-Hastings Iowa State University Follow this and additional works at: https://lib.dr.iastate.edu/rtd Part of the Higher Education and Teaching Commons, History of Science, Technology, and Medicine Commons, and the Science and Mathematics Education Commons Recommended Citation Ackerberg-Hastings, Amy K., "Mathematics is a gentleman's art: Analysis and synthesis in American college geometry teaching, 1790-1840 " (2000). Retrospective Theses and Dissertations. 12669. https://lib.dr.iastate.edu/rtd/12669 This Dissertation is brought to you for free and open access by the Iowa State University Capstones, Theses and Dissertations at Iowa State University Digital Repository. It has been accepted for inclusion in Retrospective Theses and Dissertations by an authorized administrator of Iowa State University Digital Repository. For more information, please contact [email protected]. INFORMATION TO USERS This manuscript has been reproduced from the microfilm master. UMI films the text directly from the original or copy submitted. Thus, some thesis and dissertation copies are in typewriter face, while others may be from any type of computer printer. The quality of this reproduction is dependent upon the quality of the copy submitted. Broken or indistinct print, colored or poor quality illustrations and photographs, print bleedthrough, substandard margwis, and improper alignment can adversely affect reproduction. in the unlikely event that the author did not send UMI a complete manuscript and there are missing pages, these will be noted. -

Elements of Descriptive Geometry
Livre de Lyon Academic Works of Livre de Lyon Science and Mathematical Science 2020 Elements of Descriptive Geometry Francis Henney Smith Follow this and additional works at: https://academicworks.livredelyon.com/sci_math Part of the Geometry and Topology Commons Recommended Citation Smith, Francis Henney, "Elements of Descriptive Geometry" (2020). Science and Mathematical Science. 13. https://academicworks.livredelyon.com/sci_math/13 This Book is brought to you for free and open access by Livre de Lyon, an international publisher specializing in academic books and journals. Browse more titles on Academic Works of Livre de Lyon, hosted on Digital Commons, an Elsevier platform. For more information, please contact [email protected]. ELEMENTS OF Descriptive Geometry By Francis Henney Smith Geometry livredelyon.com ISBN: 978-2-38236-008-8 livredelyon livredelyon livredelyon 09_Elements of Descriptive Geometry.indd 1 09-08-2020 15:55:23 TO COLONEL JOHN T. L. PRESTON, Professor of Latin Language and English Literature, Vir- ginia Military Institute. I am sure my associate Professors will vindicate the grounds upon which you arc singled out, as one to whom I may appro- priately dedicate this work. As the originator of the scheme, by which the public guard of a State Arsenal was converted into a Military School, you have the proud distinction of being the “ Father of the Virginia Military Institute ” You were a member of the first Board of Visitors, which gave form to the organization of the Institution; you were my only colleague during the two first and trying years of its being; and you have, for a period of twenty-eight years, given your labors and your influence, in no stinted mea- sure, not only in directing the special department of instruc- tion assigned to you, but in promoting those general plans of development, which have given marked character and wide- spread reputation to the school. -

An Analytical Introduction to Descriptive Geometry
An analytical introduction to Descriptive Geometry Adrian B. Biran, Technion { Faculty of Mechanical Engineering Ruben Lopez-Pulido, CEHINAV, Polytechnic University of Madrid, Model Basin, and Spanish Association of Naval Architects Avraham Banai Technion { Faculty of Mathematics Prepared for Elsevier (Butterworth-Heinemann), Oxford, UK Samples - August 2005 Contents Preface x 1 Geometric constructions 1 1.1 Introduction . 2 1.2 Drawing instruments . 2 1.3 A few geometric constructions . 2 1.3.1 Drawing parallels . 2 1.3.2 Dividing a segment into two . 2 1.3.3 Bisecting an angle . 2 1.3.4 Raising a perpendicular on a given segment . 2 1.3.5 Drawing a triangle given its three sides . 2 1.4 The intersection of two lines . 2 1.4.1 Introduction . 2 1.4.2 Examples from practice . 2 1.4.3 Situations to avoid . 2 1.5 Manual drawing and computer-aided drawing . 2 i ii CONTENTS 1.6 Exercises . 2 Notations 1 2 Introduction 3 2.1 How we see an object . 3 2.2 Central projection . 4 2.2.1 De¯nition . 4 2.2.2 Properties . 5 2.2.3 Vanishing points . 17 2.2.4 Conclusions . 20 2.3 Parallel projection . 23 2.3.1 De¯nition . 23 2.3.2 A few properties . 24 2.3.3 The concept of scale . 25 2.4 Orthographic projection . 27 2.4.1 De¯nition . 27 2.4.2 The projection of a right angle . 28 2.5 The two-sheet method of Monge . 36 2.6 Summary . 39 2.7 Examples . 43 2.8 Exercises . -

Descriptive Geometry Section 10.1 Basic Descriptive Geometry and Board Drafting Section 10.2 Solving Descriptive Geometry Problems with CAD
10 Descriptive Geometry Section 10.1 Basic Descriptive Geometry and Board Drafting Section 10.2 Solving Descriptive Geometry Problems with CAD Chapter Objectives • Locate points in three-dimensional (3D) space. • Identify and describe the three basic types of lines. • Identify and describe the three basic types of planes. • Solve descriptive geometry problems using board-drafting techniques. • Create points, lines, planes, and solids in 3D space using CAD. • Solve descriptive geometry problems using CAD. Plane Spoken Rutan’s unconventional 202 Boomerang aircraft has an asymmetrical design, with one engine on the fuselage and another mounted on a pod. What special allowances would need to be made for such a design? 328 Drafting Career Burt Rutan, Aeronautical Engineer Effi cient travel through space has become an ambi- tion of aeronautical engineer, Burt Rutan. “I want to go high,” he says, “because that’s where the view is.” His unconventional designs have included every- thing from crafts that can enter space twice within a two week period, to planes than can circle the Earth without stopping to refuel. Designed by Rutan and built at his company, Scaled Composites LLC, the 202 Boomerang aircraft is named for its forward-swept asymmetrical wing. The design allows the Boomerang to fl y faster and farther than conventional twin-engine aircraft, hav- ing corrected aerodynamic mistakes made previously in twin-engine design. It is hailed as one of the most beautiful aircraft ever built. Academic Skills and Abilities • Algebra, geometry, calculus • Biology, chemistry, physics • English • Social studies • Humanities • Computer use Career Pathways Engineers should be creative, inquisitive, ana- lytical, detail oriented, and able to work as part of a team and to communicate well. -

Proceedings of the Conference of the International Group for the Psychology of Mathematics Education (21St, Lahti, Finland, July 14-19, 1997)
DOCUMENT RESUME ED 416 082 SE 061 119 AUTHOR Pehkonen, Erkki, Ed. TITLE Proceedings of the Conference of the International Group for the Psychology of Mathematics Education (21st, Lahti, Finland, July 14-19, 1997). Volume 1. INSTITUTION International Group for the Psychology of Mathematics Education. ISSN ISSN-0771-100X PUB DATE 1997-00-00 NOTE 335p.; For Volumes 2-4, see SE 061 120-122. PUB TYPE Collected Works Proceedings (021) EDRS PRICE MF01/PC14 Plus Postage. DESCRIPTORS Communications; *Educational Change; *Educational Technology; Elementary Secondary Education; Foreign Countries; Higher Education; *Mathematical Concepts; Mathematics Achievement; *Mathematics Education; Mathematics Skills; Number Concepts IDENTIFIERS *Psychology of Mathematics Education ABSTRACT The first volume of the proceedings of the 21st annual meeting of the International Group for the Psychology of Mathematics Education contains the following 13 full papers: (1) "Some Psychological Issues in the Assessment of Mathematical Performance"(0. Bjorkqvist); (2) "Neurcmagnetic Approach in Cognitive Neuroscience" (S. Levanen); (3) "Dilemmas in the Professional Education of Mathematics Teachers"(J. Mousley and P. Sullivan); (4) "Open Toolsets: New Ends and New Means in Learning Mathematics and Science with Computers"(A. A. diSessa); (5) "From Intuition to Inhibition--Mathematics, Education and Other Endangered Species" (S. Vinner); (6) "Distributed Cognition, Technology and Change: Themes for the Plenary Panel"(K. Crawford); (7) "Roles for Teachers, and Computers" (J. Ainley); (8) "Some Questions on Mathematical Learning Environments" (N. Balacheff); (9) "Deepening the Impact of Technology Beyond Assistance with Traditional Formalisms in Order To Democratize Access To Ideas Underlying Calculus"(J. J. Kaput and J. Roschelle); (10) "The Nature of the Object as an Integral Component of Numerical Processes"(E. -

Descriptive Geometry for CAD Users: Ribs Construction
Journal for Geometry and Graphics Volume 18 (2014), No. 1, 115–124. Descriptive Geometry for CAD Users: Ribs Construction Evgeniy Danilov Department of Graphics, Dnepropetrovsk National University of Railway Transport 2, Lazaryan str., Dnepropetrovsk, 49010, Ukraine email: [email protected] Abstract. In 3D modeling CAD users often face problems that can be success- fully analyzed and solved only by the methods of Descriptive Geometry. One such problem is considered in this paper: the construction of structural elements of machine parts known as stiffening ribs. In addition, a possible geometry of ribs is analyzed and a review is performed of tools for its modeling available in up-to- date CAD packages. Some features are shown that are useful in representing parts with ribs in technical drawing manuals. An innovative approach is developed for educational purposes. Key Words: stiffening rib, Descriptive Geometry, CAD MSC 2010: 51N05, 97U50 1. Introduction Most current curricula suggest that Descriptive Geometry training be done concurrently with practicing the use of one or more CAD packages. As students begin to use the powerful 3D modeling capabilities of these packages for solving problems of classical Descriptive Geom- etry, they also are mastering CAD. They often solve positional and metrical problems by modeling geometrical objects and their interaction in virtual 3D space [3, 6], thereby avoiding Descriptive Geometry methods. Afterward students do not see the necessity of spatial prob- lems being solved by using plane images and they lose interest in the study of Descriptive Geometry. That impedes their academic progress and their training as engineers. It can be argued that the study of Descriptive Geometry is not possible without clear examples of how its apparatus works in solving problems that arise in the process of 3D modeling. -
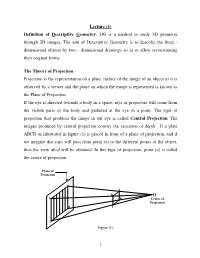
Lecture (1) Definition of Descriptive Geometry: DG Is a Method to Study 3D Geometry Through 2D Images. the Aim of Descriptive Ge
Lecture (1) Definition of Descriptive Geometry: DG is a method to study 3D geometry through 2D images. The aim of Descriptive Geometry is to describe the three - dimensional objects by two - dimensional drawings so as to allow reconstituting their original forms. The Theory of Projection Projection is the representation on a plane surface of the image of an object as it is observed by a viewer and the plane on which the image is represented is known as the Plane of Projection. If the eye is directed towards a body in a space, rays or projectors will come from the visible parts of the body and gathered at the eye in a point. The type of projection that produces the image in our eye is called Central Projection. The images produced by central projection convey the sensation of depth. If a plate ABCD as illustrated in figure (1) is placed in front of a plane of projection, and if we imagine that rays will pass from point (o) to the different points of the object, then the view abcd will be obtained. In this type of projection, point (o) is called the centre of projection. Plane of Projection a A B O b D Centre of Projection d C c Figure (1). 1 Descriptive Geometry is based on another type of projection that is called Parallel Projection or Orthographic Projection on Two Orthogonal Planes which is one of the cases of the parallel projection in which the shape description of a three dimensional is represented on drawing paper which is a two dimensional plane surface, and If we imagine that point (o), the centre of projection goes far away to infinity, the rays or projectors will become parallel to each other and normal to the plane of projection, and the view obtained is orthographic as illustrated in figures (2) and (3). -

Descriptive Geometry and Digital Representation: Memory and Innovation I
M l i Michela Rossi (editor) c Michela Rossi (editor) h e Michela Rossi (editor) l a R Nexus Ph.D. Day. Relationships between o s s l i ( e Architecture and Mathematics d i t o he IX edition of the International Conference Nexus-Relationships between Architecture and Mathematics at r ) Politecnico di Milano, sponsored by Department of Industrial Design and Department of Mathematics compris- T N NDescriptiveexus Ph .GeometryD. Day. and es a workshop dedicated to Ph.D. students. i e The event is sponsored by the Politecnico Ph.D. School and the Design Ph.D. program of Department INDA- x CO and by the National (Italian) Ph.D. School in “Science of Represen tation and Architectural Survey”. u s RDigitalelati oRepresentation:nships betw een The “Nexus Ph.D. Day” is meant to be an international and multi-disciplinary meeting between Ph.D. students P involved in scientific researches in the fields that are connected to the topic of the Conference. It intends to promote h . didactic and research exchanges trough interactions between various schools from different countries. D . AMemoryrchit eandct uInnovationre and This will give the opportunity to Ph.D. students and young Ph.D. fellow, who have di fensed their thesis in 2010 H or later, to show their work to a large international academic community, by the oral presentation of selected lecture D a and a poster session related to the conference one, to improve a meeting among people working on similar issues, y General Investigator Prof. Riccardo Migliari . Mathematics generally concerning the relationships between Architecture and Mathematics in all the different scales of design. -
Descriptive Geometry for Students of Engineering
D E SCRI PTI V E GE O ME TRY FO R STUDENTS OF ENGINEERING B Y M YE E A B E R . B E . B A AM R O S . M J S OS . M , , , A ssistant P rof ess or of Mechani cal E ngi n eeri ng i n Charge of the Ill echa ni cal L abor a to r i es i n the Un i versi ty of IlI whigan; f ormerly I n str u ctor i n D escri pti ve G eo m etry i n Harvard Uni versi ty : E ngi n eer wi th th e Gen er al E lectri c Compa ny d W ti h K r a nd Co m an a n wi th es ng o us e, Ch u rch , e r p y Member of the A mer ica n Soci ety of M echani ca l E ngi n eers ; Jl I i tgli ed d es Ver ei n es deu tscher I ngen i eure; M ember of Fran kli n I nsti tu te; B oston A ss oci ati o n f or th e A d vanc e men t of Sci ence; A mer i can Soci ety of Ci vi l E n gi n eers ; So ci ety f or th e n etc P romoti on of E n gi neeri ng E du cati o , . T H I R D E D I T I O N TH I RD THOU S A ND NEW YO RK J OHN WILEY SONS ND O N : C M I I E LO HAP AN HALL , L M T D 1909 i h t 1904 and 1905 copyr g , B Y R J AMES AMBROSE MOYE PREFA CE . -

What Is Descriptive Geometry for ? 1 Introduction 2 How to Define
327 What is Descriptive Geometry for? Hellmuth Stachel, Institute of Geometry, TU Vienna This is a pleading for Descriptive Geometry. From the very first, Descriptive Geometry is a method to study 3D geometry through 2D images thus offering insight into structure and metrical properties of spatial objects, processes and principles. The education in Descriptive Geometry provides a training of the students’ intellectual capability of space perception. Drawings are the guide to geometry but not the main aim. 1 Introduction This conference is dedicated to Rudolf BEREIS, who was born exactly 100 years ago. When he started his carreer as a professor here at the Technical University Dresden in 1957, he was full of plans and ideas. All his inspiring activities were dedicated to the promotion of Descriptive Geometry (DG). He planned also a series of textbooks on this subject. However, destiny decided differently; he passed away nine years later. So only the first volume [1] has appeared. The aim of my presentation is to explain what Descriptive Geometry is good for, a subject, which in the hierarchy of sciences is placed somewhere within or next to the field of Mathemat- ics, but also near to Architecture, Mechanical Engineering, and Engineering Graphics. I start with definitions and continue with a few examples in order to highlight that Descriptive Ge- ometry provides a training of the students’ intellectual capability of space perception (note the diagram in [15], Fig. 5) and is therefore of incotestable importance for all engineers, physicians and natural scientists. 2 How to define Descriptive Geometry In many American textbooks on Engineering Graphics, e.g. -

Illinois Industeial Uiiyeesity
CIRCULAR AND CATALOGUE OF THE OFFICERS AND STUDENTS OF TllE ILLINOIS INDUSTEIAL UIIYEESITY, URBAN A, CHAMPAIGN COUNTY, Post Office CHAMPAIGN. CIRCULAR AND CATALOGUE OF THE OFFICERS AND STUDENTS OF THE ILLINOIS INDUSTEIAL UNIVERSITY, URBAN A, CHAMPAIGN COUNTY, Post Office CHAMPAIGN. ILLINOIS INDUSTRIAL UNIVERSITY. THE ILLINOIS INDUSTRIAL UNIVERSITY is located between the contiguous cities of Urban a and Champaign, Champaign County, Illinois, 128 miles from Chicago, on the Chicago branch of the Illinois Central Railroad. It was first opened for the reception of students on Monday, the 2d day of March, 1868. The Industrial University was founded by an act of the Legis- lature, approved February 28,1867, and endowed by the Congres- sional grant of four hundred and eighty thousand acres of land scrip, under the law providing for Agricultural Colleges. It was further enriched by the donation of Champaign county, of farms, buildings, and bonds, valued at $400,000. The main University building is of brick, one hundred and twenty-five feet in length, and five stories in height. Its public rooms are sufficient for the accommodation of over four hundred students, and it has private study and sleeping rooms for one hundred and twenty. The cities of Champaign and Urbana, which are connected by a street railroad running past the University grounds, are well supplied with churches and schools, and afford abundant facilities for boarding and rooming a large body of students. The University domain, including ornamental and parade grounds, experimental -

The Theoretical Learning Impact of a Summer Engineering Program Curriculum for Underrepresented Middle School Students
Louisiana State University LSU Digital Commons LSU Doctoral Dissertations Graduate School 2010 The Theoretical Learning Impact of a Summer Engineering Program Curriculum for Underrepresented Middle School Students Vaneshette Teshawn Henderson Louisiana State University and Agricultural and Mechanical College, [email protected] Follow this and additional works at: https://digitalcommons.lsu.edu/gradschool_dissertations Part of the Education Commons Recommended Citation Henderson, Vaneshette Teshawn, "The Theoretical Learning Impact of a Summer Engineering Program Curriculum for Underrepresented Middle School Students" (2010). LSU Doctoral Dissertations. 2429. https://digitalcommons.lsu.edu/gradschool_dissertations/2429 This Dissertation is brought to you for free and open access by the Graduate School at LSU Digital Commons. It has been accepted for inclusion in LSU Doctoral Dissertations by an authorized graduate school editor of LSU Digital Commons. For more information, please [email protected]. THE THEORETICAL LEARNING IMPACT OF A SUMMER ENGINEERING PROGRAM CURRICULUM FOR UNDERREPRESENTED MIDDLE SCHOOL STUDENTS A Dissertation Submitted to the Graduate Faculty of the Louisiana State University and Agricultural and Mechanical College in partial fulfillment of the requirements for the degree of Doctor of Philosophy in The Department of Educational Theory, Policy, & Practice by Vaneshette Teshawn Henderson B.A., Physics, Xavier University of Louisiana, 2003 M.S., Biomedical Engineering, University of Michigan, 2003 May 2010 ©Copyright 2010 Vaneshette Teshawn Henderson All rights reserved ii ACKNOWLEDGEMENTS As I typed the last words for my dissertation, I began to cry. I was overwhelmed with joy. During the past four years, I believe I have experienced every emotion known to man during this extensive, yet fulfilling process, and it was all worth! God has blessed me and so many ways, and to Him.