Annotation-Less Unit Type Inference for C
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

ECSS-E-TM-40-07 Volume 2A 25 January 2011
ECSS-E-TM-40-07 Volume 2A 25 January 2011 Space engineering Simulation modelling platform - Volume 2: Metamodel ECSS Secretariat ESA-ESTEC Requirements & Standards Division Noordwijk, The Netherlands ECSS‐E‐TM‐40‐07 Volume 2A 25 January 2011 Foreword This document is one of the series of ECSS Technical Memoranda. Its Technical Memorandum status indicates that it is a non‐normative document providing useful information to the space systems developers’ community on a specific subject. It is made available to record and present non‐normative data, which are not relevant for a Standard or a Handbook. Note that these data are non‐normative even if expressed in the language normally used for requirements. Therefore, a Technical Memorandum is not considered by ECSS as suitable for direct use in Invitation To Tender (ITT) or business agreements for space systems development. Disclaimer ECSS does not provide any warranty whatsoever, whether expressed, implied, or statutory, including, but not limited to, any warranty of merchantability or fitness for a particular purpose or any warranty that the contents of the item are error‐free. In no respect shall ECSS incur any liability for any damages, including, but not limited to, direct, indirect, special, or consequential damages arising out of, resulting from, or in any way connected to the use of this document, whether or not based upon warranty, business agreement, tort, or otherwise; whether or not injury was sustained by persons or property or otherwise; and whether or not loss was sustained from, or arose out of, the results of, the item, or any services that may be provided by ECSS. -

Bidirectional Typing
Bidirectional Typing JANA DUNFIELD, Queen’s University, Canada NEEL KRISHNASWAMI, University of Cambridge, United Kingdom Bidirectional typing combines two modes of typing: type checking, which checks that a program satisfies a known type, and type synthesis, which determines a type from the program. Using checking enables bidirectional typing to support features for which inference is undecidable; using synthesis enables bidirectional typing to avoid the large annotation burden of explicitly typed languages. In addition, bidirectional typing improves error locality. We highlight the design principles that underlie bidirectional type systems, survey the development of bidirectional typing from the prehistoric period before Pierce and Turner’s local type inference to the present day, and provide guidance for future investigations. ACM Reference Format: Jana Dunfield and Neel Krishnaswami. 2020. Bidirectional Typing. 1, 1 (November 2020), 37 pages. https: //doi.org/10.1145/nnnnnnn.nnnnnnn 1 INTRODUCTION Type systems serve many purposes. They allow programming languages to reject nonsensical programs. They allow programmers to express their intent, and to use a type checker to verify that their programs are consistent with that intent. Type systems can also be used to automatically insert implicit operations, and even to guide program synthesis. Automated deduction and logic programming give us a useful lens through which to view type systems: modes [Warren 1977]. When we implement a typing judgment, say Γ ` 4 : 퐴, is each of the meta-variables (Γ, 4, 퐴) an input, or an output? If the typing context Γ, the term 4 and the type 퐴 are inputs, we are implementing type checking. If the type 퐴 is an output, we are implementing type inference. -

Programming with Gadts
Chapter 8 Programming with GADTs ML-style variants and records make it possible to define many different data types, including many of the types we encoded in System F휔 in Chapter 2.4.1: booleans, sums, lists, trees, and so on. However, types defined this way can lead to an error-prone programming style. For example, the OCaml standard library includes functions List .hd and List . tl for accessing the head and tail of a list: val hd : ’ a l i s t → ’ a val t l : ’ a l i s t → ’ a l i s t Since the types of hd and tl do not express the requirement that the argu- ment lists be non-empty, the functions can be called with invalid arguments, leading to run-time errors: # List.hd [];; Exception: Failure ”hd”. In this chapter we introduce generalized algebraic data types (GADTs), which support richer types for data and functions, avoiding many of the errors that arise with partial functions like hd. As we shall see, GADTs offer a num- ber of benefits over simple ML-style types, including the ability to describe the shape of data more precisely, more informative applications of the propositions- as-types correspondence, and opportunities for the compiler to generate more efficient code. 8.1 Generalising algebraic data types Towards the end of Chapter 2 we considered some different approaches to defin- ing binary branching tree types. Under the following definition a tree is either empty, or consists of an element of type ’a and a pair of trees: type ’ a t r e e = Empty : ’ a t r e e | Tree : ’a tree * ’a * ’a tree → ’ a t r e e 59 60 CHAPTER 8. -

Scala by Example (2009)
Scala By Example DRAFT January 13, 2009 Martin Odersky PROGRAMMING METHODS LABORATORY EPFL SWITZERLAND Contents 1 Introduction1 2 A First Example3 3 Programming with Actors and Messages7 4 Expressions and Simple Functions 11 4.1 Expressions And Simple Functions...................... 11 4.2 Parameters.................................... 12 4.3 Conditional Expressions............................ 15 4.4 Example: Square Roots by Newton’s Method................ 15 4.5 Nested Functions................................ 16 4.6 Tail Recursion.................................. 18 5 First-Class Functions 21 5.1 Anonymous Functions............................. 22 5.2 Currying..................................... 23 5.3 Example: Finding Fixed Points of Functions................ 25 5.4 Summary..................................... 28 5.5 Language Elements Seen So Far....................... 28 6 Classes and Objects 31 7 Case Classes and Pattern Matching 43 7.1 Case Classes and Case Objects........................ 46 7.2 Pattern Matching................................ 47 8 Generic Types and Methods 51 8.1 Type Parameter Bounds............................ 53 8.2 Variance Annotations.............................. 56 iv CONTENTS 8.3 Lower Bounds.................................. 58 8.4 Least Types.................................... 58 8.5 Tuples....................................... 60 8.6 Functions.................................... 61 9 Lists 63 9.1 Using Lists.................................... 63 9.2 Definition of class List I: First Order Methods.............. -

An Ontology-Based Semantic Foundation for Organizational Structure Modeling in the ARIS Method
An Ontology-Based Semantic Foundation for Organizational Structure Modeling in the ARIS Method Paulo Sérgio Santos Jr., João Paulo A. Almeida, Giancarlo Guizzardi Ontology & Conceptual Modeling Research Group (NEMO) Computer Science Department, Federal University of Espírito Santo (UFES) Vitória, ES, Brazil [email protected]; [email protected]; [email protected] Abstract—This paper focuses on the issue of ontological Although present in most enterprise architecture interpretation for the ARIS organization modeling language frameworks, a semantic foundation for organizational with the following contributions: (i) providing real-world modeling elements is still lacking [1]. This is a significant semantics to the primitives of the language by using the UFO challenge from the perspective of modelers who must select foundational ontology as a semantic domain; (ii) the and manipulate modeling elements to describe an Enterprise identification of inappropriate elements of the language, using Architecture and from the perspective of stakeholders who a systematic ontology-based analysis approach; and (iii) will be exposed to models for validation and decision recommendations for improvements of the language to resolve making. In other words, a clear semantic account of the the issues identified. concepts underlying Enterprise Modeling languages is Keywords: semantics for enterprise models; organizational required for Enterprise Models to be used as a basis for the structure; ontological interpretation; ARIS; UFO (Unified management, design and evolution of an Enterprise Foundation Ontology) Architecture. In this paper we are particularly interested in the I. INTRODUCTION modeling of this architectural domain in the widely- The need to understand and manage the evolution of employed ARIS Method (ARchitecture for integrated complex organizations and its information systems has given Information Systems). -
AVC/H.264 Advanced Video Coding Codec, Profiles & System
AVC/H.264 Advanced Video Coding Codec, Profiles & System Ali Tabatabai [email protected] Media Processing Division Sony Electronics Inc. October 25, 2005 Sony Electronics Inc Content • Overview • Rate Distortion Performance • Codec Complexity • Profiles & Applications • Carriage over the Network • Current MPEG & JVT Activities • Conclusion October 25, 2005 Sony Electronics Inc Video Coding Standards: A Brief History October 25, 2005 Sony Electronics Inc Video Standards and JVT Organization • Two organizations dominate the video compression standardization activities: – ISO/IEC Moving Picture Experts Group (MPEG) • International Standardization Organization and International Electrotechnical Commission, Joint Technical Committee Number 1, Subcommittee 29, Working Group 11 – ITU-T Video Coding Experts Group (VCEG) • International Telecommunications Union – Telecommunications Standardization Sector (ITU-T, a United Nations Organization, formerly CCITT), Study Group 16, Question 6 October 25, 2005 Sony Electronics Inc Evolution of Video Compression Standards ITU-T MPEG Video Consumer Telephony Video CD . 1990 H.261 Digital TV/DVD MPEG-1 Video Conferencing 1995 H.262/MPEG-2 H.263 Object-based coding 1998 MPEG-4 H.264/MPEG-4 AVC October 25, 2005 Sony Electronics Inc Joint Video Team ITU-T VCEG and ISO/IEC MPEG • Design Goals – Simplified and Clean Design • No backward compatibility requirements. – Compression Efficiency • Average bit rate reduction of 50% compared to existing video coding standards (MPEG-2, MPEG-4, H.263). – Improved Network Friendliness • Clean and flexible interface to network protocols • Improved error resilience for Internet and mobile (3GPP) applications. October 25, 2005 Sony Electronics Inc AVC/H.264 Standards Development Schedule Defined Baseline & Main profiles. Committee Final Draft International Draft Standard Standard Dec01 May02 Jul02 Mar03 Aug03 Sep/Oct 04 Working Final Draft 1 AVC 3rd Edition Committee - New Profile Draft Definitions (FRExt) MPEG-4 Part 10 JVT starts ITU-T H.264 technical work Added streaming together. -

Generic Programming in OCAML
Generic Programming in OCAML Florent Balestrieri Michel Mauny ENSTA-ParisTech, Université Paris-Saclay Inria Paris [email protected] [email protected] We present a library for generic programming in OCAML, adapting some techniques borrowed from other functional languages. The library makes use of three recent additions to OCAML: generalised abstract datatypes are essential to reflect types, extensible variants allow this reflection to be open for new additions, and extension points provide syntactic sugar and generate boiler plate code that simplify the use of the library. The building blocks of the library can be used to support many approachesto generic programmingthrough the concept of view. Generic traversals are implemented on top of the library and provide powerful combinators to write concise definitions of recursive functions over complex tree types. Our case study is a type-safe deserialisation function that respects type abstraction. 1 Introduction Typed functional programming languages come with rich type systems guaranteeing strong safety prop- erties for the programs. However, the restrictions imposed by types, necessary to banish wrong programs, may prevent us from generalizing over some particular programming patterns, thus leading to boilerplate code and duplicated logic. Generic programming allows us to recover the loss of flexibility by adding an extra expressive layer to the language. The purpose of this article is to describe the user interface and explain the implementation of a generic programming library1 for the language OCAML. We illustrate its usefulness with an implementation of a type-safe deserialisation function. 1.1 A Motivating Example Algebraic datatypes are very suitable for capturing structured data, in particular trees. -
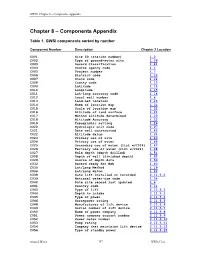
Chapter 8 – Components Appendix
GWSI: Chapter 8 – Components Appendix Chapter 8 – Components Appendix Table 1. GWSI components sorted by number Component Number Description Chapter 2 Location C001 Site ID (station number) 1.2 C002 Type of ground-water site 1.39 C003 Record Classification 1.41 C004 Source agency code 1.1 C005 Project number 1.7 C006 District code 1.10 C007 State code 1.12 C008 County code 1.13 C009 Latitude 1.14 C010 Longitude 1.15 C011 Lat-long accuracy code 1.18 C012 Local well number 1.8 C013 Land-net location 1.25 C014 Name of location map 1.31 C015 Scale of location map 1.32 C016 Altitude of land surface 1.21 C017 Method altitude determined 1.23 C018 Altitude Accuracy 1.22 C019 Topographic setting 1.26 C020 Hydrologic unit code 1.27 C021 Date well constructed 1.42 CO22 Altitude datum 1.24 C023 Primary use of site 1.43 C024 Primary use of water 1.46 C025 Secondary use of water (list w/C024) 1.47 C026 Tertiary use of water (list w/C024) 1.48 C027 Hole depth (depth drilled) 1.51 C028 Depth of well (finished depth) 1.52 C029 Source of depth data 1.53 C032 Record ready for Web 1.40 C035 Lat/Long Method 1.19 C036 Lat/Long datum 1.20 C038 Date lift installed or recorded 2.11.5.2 C039 National water-use code 1.34 C040 Date site record last updated 1.6 C041 Country code 1.11 C043 Type of lift 2.11.5.1 C044 Depth to intake 2.11.5.3 C045 Type of power 2.11.5.4 C046 Horsepower rating 2.11.5.5 C048 Manufacturer of lift device 2.11.5.6 C049 Serial number of lift device 2.11.5.7 C050 Name of power company 2.11.5.8 C051 Power company account number 2.11.5.9 C052 -

Lecture 04.1: Algebraic Data Types and General Recursion 1. Recap
Lecture 04.1: Algebraic data types and general recursion 1. Recap Recall the definition of the simply typed lambda calculus, a small programming language, from the previous class: Type t ::= int integer t1 ! t2 function Term t ::= n number t1 + t2 addition x variable l (x : t) . t0 function definition t1 t2 function application This is a language that has two main concepts: functions and numbers. We can make numbers, add them together, create functions, call them, and so on. The semantics of numbers are not remarkable—adding them together works exactly as you expect—the main formalizations of in- terest here are functions and variables. Specifically, variables in the lambda calculus are like the variables we’re used to in mathematical functions. They represent placeholders, which we at some point replace with a concrete value.1 Then, we think about functions as basically terms with variables in them, which we can choose to “call” (replace the argument variable). This enables our language to capture code reuse—i.e. we can wrap up a piece of code in a function and call it multiple times. 2. Algebraic data types While functions are a great abstraction for code, our language needs better abstractions for data. We want to be able to represent relations between data, specifically the “and” and “or” relations— either I have a piece of data that has A and B as components, or it has A or B as components. We 1This interpretation is at odds with the normal definition of a variable in most programming languages, where variables can have their values reassigned. -

Basics of Type Theory and Coq Logic Types ∧, ∨, ⇒, ¬, ∀, ∃ ×, +, →, Q, P Michael Shulman
Type-theoretic foundations Set theory Type theory Basics of type theory and Coq Logic Types ^; _; ); :; 8; 9 ×; +; !; Q; P Michael Shulman Sets Logic January 31, 2012 ×; +; !; Q; P ^; _; ); :; 8; 9 x 2 A is a proposition x : A is a typing judgment 1 / 77 2 / 77 Type theory is programming Typing judgments Type theory consists of rules for manipulating judgments. The most important judgment is a typing judgment: x1 : A1; x2 : A2;::: xn : An ` b : B For now, think of type theory as a programming language. The turnstile ` binds most loosely, followed by commas. • Closely related to functional programming languages like This should be read as: ML, Haskell, Lisp, Scheme. In the context of variables x of type A , x of type A ,..., • More expressive and powerful. 1 1 2 2 and xn of type An, the expression b has type B. • Can manipulate “mathematical objects”. Examples ` 0: N x : N; y : N ` x + y : N f : R ! R; x : R ` f (x): R 1 (n) 1 f : C (R; R); n: N ` f : C (R; R) 4 / 77 5 / 77 Type constructors Derivations The basic rules tell us how to construct valid typing judgments, We write these rules as follows. i.e. how to write programs with given input and output types. This includes: ` A: Type ` B : Type 1 How to construct new types (judgments Γ ` A: Type). ` A ! B : Type 2 How to construct terms of these types. 3 How to use such terms to construct terms of other types. x : A ` b : B A Example (Function types) ` λx :b : A ! B 1 If A: Type and B : Type, then A ! B : Type. -

Advanced Type Systems
Chapter 7 Advanced Type Systems Type structure is a syntactic discipline for enforcing levels of ab- straction. What computation has done is to create the necessity of formalizing type disciplines, to the point where they can be en- forced mechanically. —JohnC.Reynolds Types, Abstraction, and Parametric Polymorphism [?] This chapter examines some advanced type systems and their uses in functional and meta-languages. Specifically, we consider the important concepts of parametric polymorphism, subtyping,andintersection types. Their interaction also leads to new problems which are subject of much current research and beyond the scope of these notes. Each language design effort is a balancing act, attempting to integrate mul- tiple concerns into a coherent, elegant, and usable language appropriate for the intended application domain. The language of types and its interaction with the syntax on the one hand (through type checking or type reconstruction) and the operational semantics on the other hand (through type preservation and a progress theorem) is central. Types can be viewed in various ways; perhaps the most impor- tant dichotomy arises from the question whether types are an inherent part of the semantics, or if they merely describe some aspects of a program whose semantics is given independently. In one view types are intrinsic to the terms in a language, in another they are extrinisic. This is related to the issue whether a language is statically or dynamically typed. In a statically typed language, type constraints are checked at compile-time, before programs are executed; only well-typed programs are then evaluated. It also carries the connotation that types are not maintained at run-time, the type-checking having guaranteed that they are no longer necessary. -
![[MS-H264PF]: RTP Payload Format for H.264 Video Streams Extensions](https://docslib.b-cdn.net/cover/8897/ms-h264pf-rtp-payload-format-for-h-264-video-streams-extensions-2508897.webp)
[MS-H264PF]: RTP Payload Format for H.264 Video Streams Extensions
[MS-H264PF]: RTP Payload Format for H.264 Video Streams Extensions Intellectual Property Rights Notice for Open Specifications Documentation . Technical Documentation. Microsoft publishes Open Specifications documentation (“this documentation”) for protocols, file formats, data portability, computer languages, and standards support. Additionally, overview documents cover inter-protocol relationships and interactions. Copyrights. This documentation is covered by Microsoft copyrights. Regardless of any other terms that are contained in the terms of use for the Microsoft website that hosts this documentation, you can make copies of it in order to develop implementations of the technologies that are described in this documentation and can distribute portions of it in your implementations that use these technologies or in your documentation as necessary to properly document the implementation. You can also distribute in your implementation, with or without modification, any schemas, IDLs, or code samples that are included in the documentation. This permission also applies to any documents that are referenced in the Open Specifications documentation. No Trade Secrets. Microsoft does not claim any trade secret rights in this documentation. Patents. Microsoft has patents that might cover your implementations of the technologies described in the Open Specifications documentation. Neither this notice nor Microsoft's delivery of this documentation grants any licenses under those patents or any other Microsoft patents. However, a given Open Specifications document might be covered by the Microsoft Open Specifications Promise or the Microsoft Community Promise. If you would prefer a written license, or if the technologies described in this documentation are not covered by the Open Specifications Promise or Community Promise, as applicable, patent licenses are available by contacting [email protected].