Innovating Sports Shooting with Computer Vision
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

RWS Sports Ammunition Brochure
THE AMMUNITION COUNTS AIR GUN PELLETS - RIMFIRE CARTRIDGES READY FOR SUCCESS Top athletes demand a great deal of themselves in order to succeed in reaching their goals. That makes it all the more important for them to be able to trust that with regard to ammunition, the manufacturer has the same aspirations and wants to achieve perfection with their products. Millions of target shooters trust RWS for a reason. RWS | CONTENTS | 1 Christoph Dürr Member of Swiss National squad CONTENTS Page RWS successes 2 Interview with top shooters 4 RWS rimfire cartridges RWS air gun pellets RWS rimfire cartridges 6 RWS air gun pellets 20 - Premium Line 10 - Premium Line 22 - Professional Line 12 - Professional Line 24 - Sport Line 13 - Sport Line 25 - Field Line 14 - Field Line 26 Fascination Biathlon 16 RWS Test range 18 2 | SUCCESSES | RWS Andrea Arsovic Sylwia Bogacka Andrea Arsovic Barbara Engleder Silver medalist Olympic Games 2012 Silver medalist World cup Final 2014 Gold medalist Olympic Games 2016 RWS BRANDED PRODUCTS World-class performance with the perfect ammunition The RWS brand proves its outstanding daily by the quality products demon- top German quality is not cheap. But ammunition expertise with an exten- strating their superior performance and your own safety and the best possible sive product range in the sporting and total reliability. chances for greater success are worth hunting area for small arms and air guns. From training sessions to winning the price of this top class ammunition. Since their introduction, RWS cartridges Olympic titles or hunting RWS has a have enjoyed worldwide success with product to suit every purpose. -

Spring 2018 Section 004 Syllabus
George Mason University College of Education and Human Development School of Recreation, Health, and Tourism Physical Activity for Lifetime Wellness RECR 136-005 Pistol Marksmanship (1) 1 credit Spring 2018 Wednesdays 3- 5:00 PM Location: NRA Shooting Range (NRA HQ) Faculty Name: Matthew Sharpe -NRA Instructor # 15184715 -DCJS ID # 99-427481 Office Hours: By Appointment Office Location: NRA Range, Fairfax, VA Email: [email protected] Phone: 703-907-9852 Prerequisites None Participants must be 18 years of age before the class begins. Fees This course requires a (lab/course) fee of ($180.00 payable at registration and $10 for range fees payable to the NRA range). Course Description Introduces students to marksmanship skills in target shooting. Increases students' knowledge of firearm safety, international target shooting, equipment care and maintenance, and shooting sports competition methods and techniques. Course Overview Students will be exposed to all aspects of precision Handgun shooting. Each course participant will, upon successful completion of the course, demonstrate knowledge and marksmanship competencies in: 1. Pistol identification, firearm safety, fundamental care of a handgun; 2. Precision handgun shooting fundamental techniques and competitive techniques; 3. Physical, mental and environmental factors in the competitive pistol shooting sports. During the first 2 weeks of instruction, the instructor will conduct an individualized diagnostic session for each student to determine their level of comfort, knowledge and ability with a pistol. Utilizing the written material and instructor demonstrations as a base of knowledge, the student will learn the discipline required to experience true competitive target pistol shooting. The instructor will coach the student through presentations, demonstrations and “live” fire exercises (on an approved pistol range) that will teach the student the appropriate techniques involved in competitive Bullseye shooting. -

The Winchester/NRA Marksmanship Qualification Programs Has Something Fun for the Whole Family & Kids of All Ages!
90099_cv_out.qxd:QualCover08 2/9/10 1:08 PM Page 1 The Winchester/NRA Marksmanship Qualification Programs Has Something Fun for the Whole Family & Kids of All Ages! Shooting Sports — A Sport For Life! 90099_cv_out.qxd:QualCover08 2/9/10 1:08 PM Page 2 Eighth Edition–February 2010 Copyright 2004, National Rifle Association of America All rights reserved. Printed in the United States of America. This book may not be reprinted or reproduced in whole or in part by mechanical means, photocopying, electronic reproduction, scanning, or any other means without prior written permission. For more information, write to: Education & Training Division, National Rifle Association of America, 11250 Waples Mill Road, Fairfax, VA 22030. To join the NRA today, or for additional information regarding NRA Membership, call (800) NRA-3888 or visit online at www.nrahq.org. Your membership dues may be charged to American Express, Discover, Mastercard, or Visa. NR 40810 EQ 09525 90099_out.qxd:Qual Book_06.qxd 2/23/10 9:28 AM Page 1 Winchester/NRA Marksmanship Qualification Program Table of Contents Marksmanship Qualification Program ................................................................................. 2 Just for Women—Women on Target® ................................................................................ 4 Pistol Qualification ................................................................................................................. 6 Conventional “Bullseye” Pistol Qualification ...................................................................... -

Northern Mississippi Range Association Inc. 2 CHAPTER 1
STANDARD OPERATING PROCEDURES NORTHERN MISSISSIPPI RANGE ASSOCIATION PO BOX 215, 6683 140TH ST NW CASS LAKE, MINNESOTA 56633 TABLE OF CONTENTS CHAPTER 1: Preamble …....................................................... 3 CHAPTER 2: Bylaws ….......................................................... 4 CHAPTER 3: Non-Profit Organization …............................... 7 CHAPTER 4: Range Operations Guide …............................... 8 APPENDIX 1: Range Safety Briefing …................................ 11 APPENDIX 2: Waiver Release Form …................................. 15 APPENDIX 3: Injury Report Form …......................................16 Northern Mississippi Range Association Inc. 2 CHAPTER 1 PREAMBLE Northern Mississippi Rang Association (NMRA) was formed in the summer of 1999. The objective of the organization was to establish a safe location for general shooting, hunter safety and law enforcement training. A depleted gravel pit, known as the Wilkinson Gravel Pit located 5 miles South West of Cass Lake was chosen. In the fall of 2000 Cass County Environmental Service Dept. approved reclassification of the pit for use as a range and a lease agreement was entered into between Cass County and NMRA. The range was named Gordy Buchanan Memorial Range after a long time area conservation officer who conducted many hunter safely classes in that pit. With a matching grant from LCMR and the help of the Leech Lake Tribal Construction Crew, the initial dirt work of leveling the bottom of the pit and establishing the range was undertaken. Once the leveling and basic dirt work was done, the installation of some 100 yard target backers and bench rests made the pit start looking like a shooting range. Then came a trap shooting area with an old used manual trap thrower. That has now progressed to a more modern automatic PAT trap with an active summer trap league. -

Texas 4-H Shooting Sports Project Pistol Rules (2014)
TEXAS 4-H NATURAL RESOURCES PROGRAM Texas 4-H Shooting Sports Project Pistol Rules (2014) The national governing body for the Pistol events rules is the NRA (http://compete.nra.org/official- nra-rule-books.aspx); International Pistol Rules - air pistol events, Conventional Pistol Rules – smallbore pistol bullseye events, and Silhouette Pistol Rules – smallbore pistol silhouette events. These rules are used with modifications in 4-H activities and events as stated below. The following rule set supersedes all other rules where differences exist. General 4-H Shooting Sports Project Rules cover all shooting disciplines. In 4-H events, event specific rules and regulations supersede other governing body rules where differences exist. Coaches, parents, and 4-H shooters are encouraged to be familiar with each of these rule sets. 3. EQUIPMENT AND AMMUNITION 3.2 Smallbore hunter's pistol - A factory-available .22 caliber rimfire pistol chambered for .22 Short, .22 Long or .22 Long Rifle cartridges, weighing no more than 5 pounds and having a safe trigger and a barrel no longer than 12 inches measured from breech face to muzzle may be used in smallbore hunter's pistol competitions. The pistol may be of any action type except bolt action pistols which are restricted to an unlimited class. They must be in original factory condition without modification in all respects except: a. External finish - External finish and embellishments including engraving, inlays and decorative or protective finishes may be added. b. Sights - Any sights may be used, including telescopic, metallic or other optical sights. The sight radius on metallic sights may not exceed 15 inches, and the center of the sighting plane may not be more than 2 inches above the barrel or receiver. -

Shooting Sports Standard Operating Procedures
Shooting Sports Standard Operating Procedures Revision A ‐ 10‐Feb‐2014 Page 1 Shooting Sports Standard Operating Procedures Table of Contents Governance .................................................................................................................. 3 1. Authority ............................................................................................................ 3 2. Exceptions to Policies ......................................................................................... 3 3. Scope of Control ................................................................................................. 4 4. Management of Change ...................................................................................... 4 SHAC SHOOTING PROGRAM .......................................................................................... 5 1. Program Operations ............................................................................................ 5 2. Types of Shooting Ranges ................................................................................... 5 3. Adherence to Range Regulations ......................................................................... 6 4. Firearms ............................................................................................................. 6 5. Ammunition ....................................................................................................... 7 6. Archery .............................................................................................................. -

Shooting Range Rules
SHOOTING RANGE RULES 1. User permit required and fee paid before use of range is allowed. Permits must be displayed at the shooting station as required. A current photo ID for each authorized shooter must be carried on their person and made available to conservation and/or law enforcement personnel upon request. 2. All shooters must sign in at the registration / log-in station upon arrival and before commencing firing on ranges. All shooters must log out when leaving the range. 3. No person under the age of 18 is allowed to shoot without direct supervision of an adult authorized shooter unless they are at least 16 years of age and have been issued a shooting range permit by demonstrating completion of a certified / approved shooting safety course. 4. Open shooting is limited to 1 hour maximum when ranges reach full capacity in order to allow other shooters an opportunity to shoot. 5. No handling of firearms when people are forward of firing line and / or down range. All firearms must have safeties on, chambers open. No person down range until all shooting has stopped. All shooters must coordinate with each other before going down range to place, retrieve, change, or tend to targets. 6. Firearms must be handled in a safe manner at all times. Keep the chambers empty (firearms unloaded), magazines out, and cylinders open (empty) until ready to use. Reckless use of a firearm is strictly prohibited. 7. No shooting at the ground or objects on the ground or at trees or any structure. No cross shooting allowed. -
Know and Follow the NRA's Three Rules for Firearm Safety 1. Always
Portage Lake Sportsmen’s Club Range Rules 2021-22 Year ABOUT THE PLSC RANGE RULES Our PLSC members use our archery, handgun, rifle, and shotgun ranges in a spirit of good sportsmanship and responsible stewardship. Our range rules are provided: • to protect your safety and the safety of others, • to protect PLSC property, • to protect the property rights of our neighbors, • and, to preserve the club for future generations. All members must read, understand, and agree to abide by PLSC rules. Completing the membership application and payment of dues implies your consent. Please know and follow these rules at all times. Remember: You, personally, are legally responsible for any damage, on or off the range, caused by your projectile. Know and follow the NRA’s Three Rules for Firearm Safety 1. Always keep your firearm pointed in a safe direction. 2. Always keep your finger off the trigger until ready to shoot. 3. Always keep firearms unloaded until ready to use. The following sections of your membership packet list the General Range Rules followed by the rules specific to each range (6 pages total). PLSC GENERAL RANGE RULES (APPLIES TO ALL RANGES) Wear eye and hearing protection at all times while you are on or around active (“hot”) ranges. It is specifically prohibited to remove an uncased firearm from a vehicle and move around the facilities. All firearms shall remain cased until at the specific shooting range where they will be used. Firearms shall be pointed down range while at a shooting station. When moving to a different shooting station, firearms shall be carried with the muzzle pointing up. -

Our Passion. Your Success. New!
OUR PASSION. YOUR SUCCESS. NEW! Today’s new and innovative semi-auto rimfire rifles and their competitive shooting disciplines are at an all-time high in popularity. Unfortunately, quality .22 LR semi-auto ammunition SEMI-AUTO RIFLE has not evolved at the same pace – until now. Competitors seeking to gain an edge with their factory and semi- New for 2020, SK’s “Semi-Auto Rifle” is designed to custom firearm builds will trust SK Semi-Auto Rifle to deliver outperform, replace, and eventually retire all other results time and again, with repeatable accuracy. SK’s Semi-Auto inferior semi-auto ammunition offerings currently Rifle is a “true” match-grade product with an unbeatable price- crowding the market. It’s built to deliver pinpoint quality ratio. Big on accuracy, great with performance. accuracy while functioning flawlessly through any 10/22 style firearms, AR’s, 597’s, 64’s, and more. Load with SK Semi-Auto Rifle. Engage Targets. Repeat. FOR 100 YARDS AND BEYOND! LONG RANGE MATCH The new SK Long Range Match ammunition is designed for demanding rimfire enthusiasts regularly acquiring targets out to 100 yards and beyond. It is purpose-built for today’s long range rimfire shooting disciplines increasing in popularity, such as PRC, tactical rimfire, long range silhouette, and more. SK Long Range delivers accurate, high-quality rounds that reliably feed through your competitive target rifle. Centerfire competition shooters will also find SK Long Range Match the ideal training companion to prepare with .22 LR firearms of similar configuration. Whether you’re actively competing in today’s popular long range rimfire sports or connecting with LR targets from the firing line at your local club, instill the confidence you deserve with new SK Long Range Match. -
Guide to Lead Management for Air Gun Shooting
NLU #747 GUIDE TO LEAD MANAGEMENT FOR AIR GUN SHOOTING A Guide to Ensuring Participant Health during Air Rifle and Air Pistol Shooting through Proper Range Design, the Effective Man- agement of Lead Exposures, Personal Hygiene Practices and Range Cleaning Procedures. Produced by USA Shooting and the Civilian Marksmanship Program © USAS & CMP, 2017 INTRODUCTION LEAD MANAGEMENT FOR AIR GUN SHOOTING This Guide to Lead Management for Air Gun Shooting was pro- duced and published by USA Shooting and the Civilian Marksmanship Program to provide practical answers to the many questions that arise as a result of the use of lead pellets or projectiles during air rifle and air pistol target training and competitions. Lead is a toxic substance and when taken into the body in amounts ex- ceeding minimum amounts established by medical experts, it can have serious adverse health impacts. Fortunately, all available research shows that air gun shooters, regardless of age, do not face any health risks from air gun shooting if they follow proper hygiene practices and the air gun range is properly managed. This Guide provides the best information that is currently available re- garding a series of questions about the use of lead pellets for air gun shooting. The contents of the Guide are: Health and Environment Information Regarding the Use of Lead Pellets on Indoor Air Gun Ranges; this section summarizes available research data on issues related to air gun shooting. Guidelines for Air Gun Range Cleaning and Maintenance; an article that describes range cleaning procedures that tests show can success- fully reduce lead residues on range floors to non-detectable levels. -

Shooting Range Rules & Regulations
Shooting Range Rules & Regulations • Four basic firearm rules are ALWAYS in effect on ALL MDWFP Ranges: o All guns are always loaded! Treat them that way! o Never let your muzzle cover anything you’re not willing to destroy! o Keep your finger off the trigger ‘til your sights are on the target! o Always be sure of your target! • All shooters and their guests must check in at the Range Office PRIOR TO USING ANY RANGE. Before departing, all shooters and their guests must also check out there. • All individuals (shooters and non-shooters) 16 years of age and older are required to pay a daily fee of $15.00 to use the facility. • Unless you are inside of a building or vehicle (not including golf carts) eye and ear protection must be worn by everyone on the entire range facility, at any time during which firearms are being discharged. • Shooters and guests must promptly obey all Range Officer commands! • Shooters are responsible for the conduct of non-shooting guest(s). This is not a playground. For obvious safety reasons, parents or guardians (18 years or older) must ensure that their children are close beside them at all times (no more than 10 feet away). • Shooters under the age of 18 must be accompanied by an adult (meaning someone 18 years of age or older. • Persons drinking or under the influence of alcohol or drugs will NOT be permitted on any MDWFP range facility! • Smoking is PROHIBITED at all range facilities. The only place that anyone may smoke is within the confines of their personally-owned vehicle, with all openings closed (meaning all doors, windows, hatchbacks, etc.). -
Inspections at U.S. Shooting Ranges from 2004 Through 2013
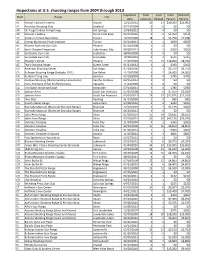
Inspections at U.S. shooting ranges from 2004 through 2013 Inspection Total Lead Initial Reduced State Range City Date violations Related Penalty Penalty AL Hoover Tactical Firearms Hoover 12/12/2012 20 17 $39,200 $22,000 AL Precision Shooting Club Saraland 07/23/2004 0 0 $0 $0 AR On Target Indoor Firing Range Hot Springs 10/24/2013 5 4 $0 $0 AR Shooter's Gallery North Little Rock 03/14/2005 9 6 $4,050 $450 AZ Jensen's Arizona Sportsman Tucson 10/26/2005 18 3 $3,750 $2,438 AZ Ocongi Marksman Pistol Institute Tucson 02/12/2013 1 1 $600 $600 AZ Phoenix Rod and Gun Club Phoenix 01/29/2008 0 0 $0 $0 AZ Sam's Shooter Emporium Lake Havasu City 09/06/2012 6 5 $300 $300 AZ Scottsdale Gun Club Scottsdale 08/06/2009 0 0 $0 $0 AZ Scottsdale Gun Club Scottsdale 10/18/2010 2 2 $525 $525 AZ Shooter's World Phoenix 11/03/2004 21 15 $18,000 $8,250 AZ Ted's Shooting Range Queen Creek 01/23/2012 3 2 $300 $300 CA American Shooting Center San Diego 07/19/2006 5 1 $3,750 $3,750 CA Bullseye Shooting Range (Savbyko 1911) San Rafael 11/18/2008 6 2 $4,000 $4,000 CA Burbank Firing Line Burbank 02/19/2004 5 4 $740 $740 CA Cordova Shooting (Marksmanship Consultants) Rancho Cordova 03/15/2012 0 0 $0 $0 CA Guns, Fishing & Other Stuff (Morcorp) Vacaville 11/04/2009 0 0 $0 $0 CA Iron Sights Shooting Range Oceanside 07/14/2011 3 0 $780 $780 CA Jackson Arms South San Francisco 05/21/2008 6 6 $7,350 $2,100 CA Jackson Arms South San Francisco 05/01/2013 15 15 $22,675 $11,010 CA Nice Shot Redding 01/11/2005 1 0 $85 $85 CA Reed's Indoor Range Santa Clara 04/28/2010 2 2 $330