JEDEC Emmc Card Product Std V4.41__84-A441.Book
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Multimediacard Product Manual
MultiMediaCard Product Manual This manual covers the SanDisk MultiMediaCard which was developed by SanDisk’s Design Center located in Tefen, Israel. The MultiMediaCard supports version 1.4 of the MultiMediaCard Specification. ® CORPORATE HEADQUARTERS 140 Caspian Court Sunnyvale, CA 94089-1000 408-542-0500 FAX: 408-542-0503 URL: http://www.sandisk.com SanDisk® Corporation general policy does not recommend the use of its products in life support applications where in a failure or malfunction of the product may directly threaten life or injury. Per SanDisk Terms and Conditions of Sale, the user of SanDisk products in life support applications assumes all risk of such use and indemnifies SanDisk against all damages. The information in this manual is subject to change without notice. SanDisk Corporation shall not be liable for technical or editorial errors or omissions contained herein; nor for incidental or consequential damages resulting from the furnishing, performance, or use of this material. All parts of the SanDisk MultiMediaCard documentation are protected by copyright law and all rights are reserved. This documentation may not, in whole or in part, be copied, photocopied, reproduced, translated, or reduced to any electronic medium or machine readable form without prior consent, in writing, from SanDisk Corporation. SanDisk and the SanDisk logo are registered trademarks of SanDisk Corporation. Product names mentioned herein are for identification purposes only and may be trademarks and/or registered trademarks of their respective companies. © 2000 SanDisk Corporation. All rights reserved. SanDisk products are covered or licensed under one or more of the following U.S. Patent Nos. 5,070,032; 5,095,344; 5,168,465; 5,172,338; 5,198,380; 5,200,959; 5,268,318; 5,268,870; 5,272,669; 5,418,752; 5,602,987. -

All-In-One Photo Printer
MP980 All-In-One Photo Printer Ultimate Wireless1 All-In-One Photo Printer with 3.5" LCD. • Six individual ink system featuring gray ink provides professional color and monochrome photos • ChromaLife100+ system delivers vibrant photos that last up to 300 years2 • Maximum 9600 x 2400 color dpi3 with microscopic droplets as small as 1 picoliter using FINE technology Special Gray Ink • 4800 dpi high resolution CCD scanner for documents and films The six ink system features a Canon exclusive gray ink that gives you professional quality black & white photos. • White LED eliminates warm-up time4 for document scanning Speed & Quality Ease of Use Connectivity 20 2 1 6 7 3 5 MP980 All-In-One Photo Printer Technical Information8 PRINT Print Features Auto Duplex Print, Auto Photo Fix, Borderless Printing,9 Calendar Print, Direct Print, Document Printing, Grayscale Printing, ID Photo Print, Photo Index Sheet, Photo Printing, Template Print Print Speed5 Black Up to 26 ppm (As fast as 2.3 seconds per page) Color Up to 21 ppm (As fast as 2.9 seconds per page) 4” x 6” Borderless Photo Approx. 20 seconds Number of Nozzles Color: 5,632, Black: 512, Total: 6,144 Picoliter Size (Color) 1, 2 and 5 Print Resolution3 Color Up to 9600 x 2400 dpi Black Up to 600 x 600 dpi Paper Sizes 4" x 6," 5" x 7," 8" x 10," Letter, Legal, U.S. #10 Envelopes Paper Tray Capacity Auto Sheet Feeder: 150 Pages, Cassette: 150 Pages (Plain Paper) COPY Copy Features 4 in 1 / 2 in 1, Auto Duplex Copy, Auto Exposure/Intensity Copy, Continuous Copy, Face Brightener/Fading Correction, Film Copy, Fit-to-Page, Image Repeat, Manual Color Adjustment, Masking Copy, Multiple Copy: 1-99 Pages, Photo Reprint, Preset Copy Ratios, Trimming Copy, Zoom 5 Copy Speed Black Up to 24 cpm (As fast as 2.5 seconds per page) Ordering Information Color Up to 19 cpm (As fast as 3.2 seconds per page) Model No. -
Capturemovemanipulates
CAPTUREMOVEMANIPULATESTORE Flash Memory Cards from Simpletech CompactFlash Secure Digital MultiMediaCard RS-MMC miniSD Flash Memory Cards from SimpleTech Capture your digital photos, music, and files with SimpleTech high-speed flash FLASHMEMORYCARDS memory cards. CompactFlash CompactFlash (CF) flash memory cards are the most popular form factor of flash storage used in consumer devices today. CF cards are ideal storage solutions for digital cameras, MP3 players, PDAs, palmtops, and handheld PCs. Features • Low power consumption • Compatible with all CF devices • Hot Swappable • CFA and PCMCIA Compliant • Highest Capacity Available using IC TowerTM Chip Stacking Capacities 32MB-4GB Dimension 1.69" (w) x 1.43" (l) x 0.13" (t) Weight 11.4g Interface ATA True IDE Operating Temperature 0o - 70o C Power 3.3V or 5V Operation Warranty Lifetime Secure Digital Secure Digital (SD) flash memory cards are next generation memory devices that offer a combination of high storage capacity, fast data transfer rates, great flexibility and excellent security. Features • Copyrights protection function • SD and SPI interface supported • Nonvolatile solid-state storage • Mechanical write protect switch Capacities 32MB - 1GB Dimension 0.94" (w) x 1.26" (l) x 0.08" (t) Weight 1g Interface Secure Digital Mode SPI Mode miniSD card adapter can be use in SD card socket Operating Temperature 0o - 70o C Power 2.7V - 3.6V Warranty Lifetime MultiMediaCard MultiMediaCards (MMC) flash memory cards are highly integrated flash products which let you carry more music, images, data, and voice recordings. MMC cards are small but rugged. They are great for MP3 players, digital cameras, voice recorders, smart phones and digital camcorders. -

Card Reader 00200128 "All in One" USB Card Reader, USB-A, USB 3.0
Card Reader 00200128 "All in One" USB Card Reader, USB-A, USB 3.0 Highlightstext: - For connecting a PC, notebook or MacBook to all common memory cards for direct data exchange in both directions - Super speed data transfer rates of up to 5 Gbps - Detachable USB cable for connection to a PC / notebook - Flexible materials guarantee optimum kink protection and prevent cable breakage - High-quality materials and workmanship guarantee excellent transmission quality - Allows fast data transfer between the card and the PC when used with a UDMA capable CF card - Allows fast data transfer between the card and the PC when used with a UHS-I capable SD card - Card reader for reading and writing inserted memory cards - Suitable and tested for USB 3.0, backwards compatible with USB 2.0 - Plug & Play, no manual software / driver installation required - Power supply via USB Memory Cards: - SD/SDHC/SDXC - MicroSD/microSDHC/microSDXC - MMC/MMC Plus/MMC 4.0 - MS/MS Duo/MS PRO Duo/MS PRO-HG - CompactFlash I & II - xD picture card System Requirements: - Operating system: Windows 10/8/7 and Mac OS 10.8 upwards Technical characteristics: - Connection: USB-A Plug - Data Transfer Rate: Up to 5 Gbit/s - USB Standard: USB 3.0 - Memory Card Type 1: CompactFlash Type I, CompactFlash Type II, Memory Stick (TM), Memory Stick Duo (TM), Memory Stick Pro (TM), Memory Stick Pro Duo (TM), Microdrive, MultiMediaCard, SD Card, SDHC Memory Card, SDXC Memory Card, microSD, microSDHC, microSDXC, xD-Card - Type: Cardreader Extern - Width x Depth x Height: 58 x 99 x 17 mm - Colour: Black - Product Division: PC & Notebook - Shade of colour: Black Delivery: - 1 "All in One" USB card reader - 1 USB cable Seite 1 von 2 Hama GmbH & Co KG • Sitz der Gesellschaft: Dresdner Straße 9 • 86653 Monheim/Bayern • GERMANY • Tel. -
USB 3.0 Front Panel Hub + Card Reader Combo Let You Get the Fastest Way to Connect up to USB 3.0 Devices Quickly and Easily
USB 3.0 Front Panel Hub + Card Reader Combo User Manual Ver. 2.00 All brand names and trademarks are properties of their respective owners. Contents: Chapter 1: Introduction ...................................................... 3 1.1 Product Introduction .................................................... 3 1.2 Features ........................................................................ 4 1.3 System Requirements .................................................. 5 1.4 Package Contents ......................................................... 5 Chapter 2: Getting Started ................................................. 5 2.1 Hardware Layout ......................................................... 5 2.2 Hardware Installation .................................................. 7 2.3 Driver Installation ...................................................... 11 MN3000000087 Page 2 Chapter 1: Introduction 1.1 Product Introduction This USB 3.0 Front Panel Hub + Card Reader Combo let you get the fastest way to connect up to USB 3.0 devices quickly and easily. It built-in three USB 3.0 Super-Speed ports, and it is also integrated with one slot card reader. This internal USB 3.0 Front Panel Hub + Card Reader Combo device fits into 3.5’’ or 5.25’’ drive bay to save the desktop space, and it works seamlessly with all USB 1.1 and USB 2.0 devices. With 10 times faster throughput than USB 2.0 standard and backward compatible with current USB device features, you can enjoy fast access for high-bandwidth device such as External hard drives, High -
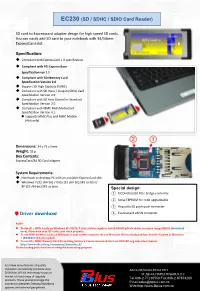
SD / SDHC / SDIO Card Reader)
EC230 (SD / SDHC / SDIO Card Reader) SD card to Expresscard adapter design for high speed SD cards. You can easily add SD card to your notebook with 34/54mm ExpressCard slot. Specification: Compliant with ExpressCard 1.0 specification Compliant with PCI Express Base Specification rev 1.1 Compliant with SD Memory Card Specification Version 2.0 Support SD High Capacity (SDHC) Compliant with SD Input / Output (SDIO) Card Specification Version 2.0 Compliant with SD Host Controller Standard Specification Version 2.0 Compliant with MMC MultiMediaCard Specification Version 4.1 Supports MMC Plus and MMC Mobile. (4bit only) Dimensions: 34 x 75 x 5mm Weight: 35 g Box Contents: ExpressCard/34 SD Card adapter System Requirements: Notebook or desktop PC with an available ExpressCard slot. Windows 7 (32-/64-bit) / Vista (32-/64-bit) SP2 or later/ XP (32-/64-bit) SP3 or later Special design: ○1 RICOH R5U230 PCIe bridge controller ○2 Serial EEPROM for code upgradeable 3 Hi quality SD push-push connecter ○ Driver download ○4 Expresscard 26PIN connecter Notice To use SD / SDHC Cards on Windows XP/VISTA/7 your system requires install RICOH private driver for more compatibility (download here). Otherwise your SD cards can’t work properly. To use SDIO wireless Cards on Windows 7, your system requires choose Microsoft SDA host inbox driver. And SP1 Update or Windows 7 (KB983177) hotfix update. To use SD / SDHC Memory Card Formatting Software, Please download file from SDCARD.org web-site as below: http://www.sdcard.org/consumers/formatter_3/ Please backup your data before using the formatting program. -

Sandisk Multimediacard and Reduced-Size Multimediacard
SanDisk MultiMediaCard and Reduced-Size MultiMediaCard Product Manual Version 1.3 Document No. 80-36-00320 April 2005 SanDisk Corporation Corporate Headquarters • 140 Caspian Court • Sunnyvale, CA 94089 Phone (408) 542-0500 • Fax (408) 542-0503 www.sandisk.com Revision 1.3 MultiMediaCard/RS-MultiMediaCard Product Manual SanDisk® Corporation general policy does not recommend the use of its products in life support applications where in a failure or malfunction of the product may directly threaten life or injury. Per SanDisk Terms and Conditions of Sale, the user of SanDisk products in life support applications assumes all risk of such use and indemnifies SanDisk against all damages. See “Disclaimer of Liability.” This document is for information use only and is subject to change without prior notice. SanDisk Corporation assumes no responsibility for any errors that may appear in this document, nor for incidental or consequential damages resulting from the furnishing, performance or use of this material. No part of this document may be reproduced, transmitted, transcribed, stored in a retrievable manner or translated into any language or computer language, in any form or by any means, electronic, mechanical, magnetic, optical, chemical, manual or otherwise, without the prior written consent of an officer of SanDisk Corporation. All parts of the SanDisk documentation are protected by copyright law and all rights are reserved. SanDisk and the SanDisk logo are registered trademarks of SanDisk Corporation. CompactFlash is a U.S. registered trademark of SanDisk Corporation. Product names mentioned herein are for identification purposes only and may be trademarks and/or registered trademarks of their respective companies. -

Download Your FREE Comprehensive Parts Catalog Today!
520 CONNECTORS MEDIA & MEDIA ACCESSORIES NEUTRIK ETHERCON - RJ45 TYPE MAXELL / TDK AUDIO CASSETTES ITEM TYPE ITEM LENGTH DESCRIPTION NE8FDV-Y110 Nickel panel, vertical PCB mount, accepts NE8MC, punch down terminals MAXELL NE8FDP Nickel panel, D-shape, feedthrough receptacle, latch lock, accepts NE8MC MX-COM30 30 Normal bias NE8FDP-B As NE8FDP, but w/black D-series metal flange MX-COM45 45 Normal bias NE8MC RJ45 carrier for RJ45 plugs - shell, fixing disk, chuck, bush & boot MX-COM60 60 Normal bias NE8MC-B As NE8MC but with black chromium shell MX-COM90 90 Normal bias NE8MC-B-1 NE8MC-B version with X series Neutrik black shell MX-COM120 120 Normal bias NE8FF Feedthrough RJ45 coupler for cable extensions BSE-XX Boot accessory for Ethercon series - XX - specify color NE8MC BULK RECORDABLE CD-R ITEM DESCRIPTION CRIMP-ON MODULAR RJ45 JVC (TAIYO YUDEN) – CD-R, 80 min, 52X, sold per spindle ITEM TYPE JCDR-WPY-SB Silver print, thermal, 100/spindle BTX JCDR-ZZP-SB Silver printable, thermal, 100/spindle CD-CAT6M Cat6 plug JCDR-TWY-SB White printable, thermal, 100/spindle PLATINUM TOOLS JCDR-SPT-SK Silver printable, thermal, 100-disc tape wrap 100003B EZ-RJ45 plug for Cat5e (bag of 100) JCDR-WPT-SK White printable, thermal, 100-disc tape wrap JCDR-SPY-SB Silver printable, inkjet, 100/spindle 100026C EZ-RJ11/12 plug (bag of 50) CD-CAT6M JCDR-WPP-SK White printable, inkjet, hub printable, 100-disc tape wrap 100020 EZ-RJ45 shielded cat5e connector (bag of 50) JCDR-ZZ-SB 100-pack spindle, silver 100035 EZ-RJ45 Cat5e snagless boot (bag of 50) JCDR-SPP-SK -
The Promaster® Professional Super Speed USB 3.0 Universal Memory
The ProMaster® Professional Super Speed USB 3.0 Universal Memory Card Reader/Writer lets you access your pictures or other files from a memory card without the need to directly connect a camera or other media device to your computer. When connected to a USB 3.0 port on your computer, the Super Speed USB 3.0 interface transfers images and data at up to 5 Gbps, more than ten times faster than a USB 2.0 reader. Follow the simple instructions in this user manual and enjoy the benefits of these convenient features: Easily access media and manage content almost anywhere Includes slot-to-slot read/write/copy and USB mass-storage capabilities Compact Flash Type I, Compact Flash Type II, Compact Flash/UDMA 6, Microdrive, Secure Digital (SD), Secure Digital High Capacity (SDHC), Secure Digital Extended Capacity (SDXC), Secure Digital 2.0, Mini Secure Digital, Micro SD, xD Picture Card (including Type M), MultiMediaCard (MMC), RS-MMC, IBM/Hitachi Microdrive, Memory Stick, Memory Stick PRO, Memory Stick Duo, Memory Stick MagicGate and more.* *Some cards may require adapter supplied by memory card manufacturer. Supports automatic card detection and USB 3.0 super speed data transfer Backwards compatible to USB 2.0 interfaces Eliminates need for direct connection of media device to save battery power Windows, Mac, and Linux compatible — hot swappable, Plug and Play INSTALLATION Using the included USB cable, connect the ProMaster® Professional Super Speed USB 3.0 Universal Memory Card Reader/Writer to a USB port on your computer. Double-click on "My Computer" to confirm that the three drive letters labeled Removable Disk appear. -
USB 3.0 Flash Memory Card Reader Installation Guide
USB 3.0 Flash Memory Card Reader Installation Guide Introduction The USB 3.0 Flash Memory Card Reader is the perfect choice for computer users looking for a flash memory card reader/writer that's portable and supports multi-format flash memory cards. Key Features and Benefits • Compliant with Universal Serial Bus 3.0 Specification and backward compatible with USB 2.0/1.1 • Supports SDXC and MSXC up to 2TB • Multi-Slot USB 3.0 card reader supports: - Secure Digital (SD), SDHC, SDXC, miniSD, microSD (T-flash) - MultiMediaCard (MMC), RS-MMC, MMCmobile, MMCplus and MMCmicro - Memory Stick (MS), MSXC, MS-PRO, MS-PRO Duo, MS Duo, Micro-MS (M2) and MSPRO-HG Duo 8-bit mode 04-0951A 1 System Requirements • Notebook or desktop computer with an available USB port (USB 3.0 recommended) • Windows® 8 (32-/64-bit) / 7 (32-/64-bit) / Vista (32-/64-bit) / XP (32-/64-bit) / Server 2003 & 2008 (32-/64-bit) / Server 2008 R2 • Mac OS® X v10.6 or later Package Contents • USB 3.0 Flash Memory Card Reader • Installation guide Layout SD/SDHC/ SDXC/MMC Micro SD/ TF MS/MSXC USB 3.0 connector Figure 1: Layout Note: The Micro SD slot and SD slot can not be used simultaneously 2 Installation In order to work as a USB 3.0 card reader, the driver for your USB 3.0 host controller has to be properly installed. 1. Plug the Card Reader's USB 3.0 connector to a USB 3.0 port of the computer. 2. The Card Reader will automatically be detected and installed when connected to the USB 3.0 port. -

Sandisk Compactflash™ and Multimediacard
SanDisk Flash Data Storage SanDisk CompactFlash™ aboutSanDisk and MultiMediaCard SanDisk MultiMediaCard for SanDisk Corporation, the world’s largest supplier of flash SanDisk Corporate Southern Region USA, Headquarters Latin & South America data storage products, designs, manufactures and markets 140 Caspian Court 101 Southhall Lane, Suite 400 Sunnyvale, CA 94089-1000 Maitland, FL 32751 industry-standard, solid-state data, digital imaging and Phone: 408-542-0500 Phone: 407-667-4480 Form Factor ultra-small size Fax: 408-542-0503 Fax: 407-667-4834 Small audio storage products using its patented, high density http://www.sandisk.com European Sales Office Solutions flash memory and controller technology. SanDisk is based SanDisk Sales Offices SanDisk GmbH Northwestern Region USA Karlsruher Str. 2C in Sunnyvale, CA. 140 Caspian Court D-30519 Hannover, Germany Sunnyvale, CA 94089-1000 Phone: 49-511-8759185 The defacto for small Phone: 408-542-0730 Fax: 49-511-8759187 SanDisk, the world’s largest supplier of flash To order, or for more information, call: 408-542-0595. Fax: 408-542-0403 France and consumer Central Region USA SanDisk Southern Europe data storage products, has the small form One Metro Place 4, rue de l’abreuvoir electronic devices MetroPlace South 92415 Courbevoie Cedex factor solutions that today’s ever smaller, Suite 100 France Dublin, OH 43017 Phone: 33-1-4717-6510 If it’s ultra-small size you need, the SanDisk MultiMediaCard Phone: 614-760-3700 Fax: 33-1-4717-6531 more functional portable devices demand. Fax: 614-760-3701 is the solution. The MultiMediaCard is the world’s smallest SanDisk. The most Japan Sales Office solid-state storage device, bringing removable flash memory Eastern Region USA & Canada SanDisk K.K., Japan trusted name in 175 North Main Street SanDisk Ltd. -

The World's Smallest Flash Card
Hitachi Releases "Reduced Size MultiMediaCard", the World's Smallest Flash Card 16/32/64-Mbyte capacity cards approximately half the size of a MultiMediaCard, for use in wearable mobile devices Tokyo, November 21, 2002 Hitachi, Ltd. (TSE: 6501) today announced the Reduced Size MultiMediaCard (RS-MMC™) offering the same functions as a MultiMediaCard™*1 in a package approximately half the size, as a data storage medium for small mobile devices including next-generation mobile phones and PDAs, and portable imaging products such as digital cameras. As the first step, sample shipments of the 16 Mbyte HB28H016RM2, 32 Mbyte HB28D032RM2, and 64 M byte HB28B064RM2 will start on November 25, 2002 in Japan. A reduced-size standard for the MultiMediaCard was approved at the MultiMediaCard Association (MMCA), the MultiMediaCard standardization body, and MMCA announced RS-MMC on November 11 , 2002 ( http://www.mmca.org/ ). Hitachi’s cards are the first commercial models of RS-MMC, featuring the world's smallest flash card size of 18 mm × 24 mm × 1.4 mm. They will respond to the needs of end- product downsizing, and will also contribute to the future advent of even smaller, wearable devices. Hitachi plans to release 128- and 256-Mbyte models in the latter half of 2003. < Background > MultiMediaCards are small-sized, large-capacity, removable data storage media whose ease of use has led to their widespread use in such products as mobile phones, digital cameras, PDAs, and portable music players, and demands for these cards are expected to continue to grow in the future. Hitachi currently offers a lineup of 16-, 32-, 64-, and 128-Mbyte MultiMediaCards, meeting demands for small size, large capacity, and high speed.