Cryptanalysis of Sigaba
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Historical Ciphers • A
ECE 646 - Lecture 6 Required Reading • W. Stallings, Cryptography and Network Security, Chapter 2, Classical Encryption Techniques Historical Ciphers • A. Menezes et al., Handbook of Applied Cryptography, Chapter 7.3 Classical ciphers and historical development Why (not) to study historical ciphers? Secret Writing AGAINST FOR Steganography Cryptography (hidden messages) (encrypted messages) Not similar to Basic components became modern ciphers a part of modern ciphers Under special circumstances modern ciphers can be Substitution Transposition Long abandoned Ciphers reduced to historical ciphers Transformations (change the order Influence on world events of letters) Codes Substitution The only ciphers you Ciphers can break! (replace words) (replace letters) Selected world events affected by cryptology Mary, Queen of Scots 1586 - trial of Mary Queen of Scots - substitution cipher • Scottish Queen, a cousin of Elisabeth I of England • Forced to flee Scotland by uprising against 1917 - Zimmermann telegram, America enters World War I her and her husband • Treated as a candidate to the throne of England by many British Catholics unhappy about 1939-1945 Battle of England, Battle of Atlantic, D-day - a reign of Elisabeth I, a Protestant ENIGMA machine cipher • Imprisoned by Elisabeth for 19 years • Involved in several plots to assassinate Elisabeth 1944 – world’s first computer, Colossus - • Put on trial for treason by a court of about German Lorenz machine cipher 40 noblemen, including Catholics, after being implicated in the Babington Plot by her own 1950s – operation Venona – breaking ciphers of soviet spies letters sent from prison to her co-conspirators stealing secrets of the U.S. atomic bomb in the encrypted form – one-time pad 1 Mary, Queen of Scots – cont. -
The Mathemathics of Secrets.Pdf
THE MATHEMATICS OF SECRETS THE MATHEMATICS OF SECRETS CRYPTOGRAPHY FROM CAESAR CIPHERS TO DIGITAL ENCRYPTION JOSHUA HOLDEN PRINCETON UNIVERSITY PRESS PRINCETON AND OXFORD Copyright c 2017 by Princeton University Press Published by Princeton University Press, 41 William Street, Princeton, New Jersey 08540 In the United Kingdom: Princeton University Press, 6 Oxford Street, Woodstock, Oxfordshire OX20 1TR press.princeton.edu Jacket image courtesy of Shutterstock; design by Lorraine Betz Doneker All Rights Reserved Library of Congress Cataloging-in-Publication Data Names: Holden, Joshua, 1970– author. Title: The mathematics of secrets : cryptography from Caesar ciphers to digital encryption / Joshua Holden. Description: Princeton : Princeton University Press, [2017] | Includes bibliographical references and index. Identifiers: LCCN 2016014840 | ISBN 9780691141756 (hardcover : alk. paper) Subjects: LCSH: Cryptography—Mathematics. | Ciphers. | Computer security. Classification: LCC Z103 .H664 2017 | DDC 005.8/2—dc23 LC record available at https://lccn.loc.gov/2016014840 British Library Cataloging-in-Publication Data is available This book has been composed in Linux Libertine Printed on acid-free paper. ∞ Printed in the United States of America 13579108642 To Lana and Richard for their love and support CONTENTS Preface xi Acknowledgments xiii Introduction to Ciphers and Substitution 1 1.1 Alice and Bob and Carl and Julius: Terminology and Caesar Cipher 1 1.2 The Key to the Matter: Generalizing the Caesar Cipher 4 1.3 Multiplicative Ciphers 6 -

Polish Mathematicians Finding Patterns in Enigma Messages
Fall 2006 Chris Christensen MAT/CSC 483 Machine Ciphers Polyalphabetic ciphers are good ways to destroy the usefulness of frequency analysis. Implementation can be a problem, however. The key to a polyalphabetic cipher specifies the order of the ciphers that will be used during encryption. Ideally there would be as many ciphers as there are letters in the plaintext message and the ordering of the ciphers would be random – an one-time pad. More commonly, some rotation among a small number of ciphers is prescribed. But, rotating among a small number of ciphers leads to a period, which a cryptanalyst can exploit. Rotating among a “large” number of ciphers might work, but that is hard to do by hand – there is a high probability of encryption errors. Maybe, a machine. During World War II, all the Allied and Axis countries used machine ciphers. The United States had SIGABA, Britain had TypeX, Japan had “Purple,” and Germany (and Italy) had Enigma. SIGABA http://en.wikipedia.org/wiki/SIGABA 1 A TypeX machine at Bletchley Park. 2 From the 1920s until the 1970s, cryptology was dominated by machine ciphers. What the machine ciphers typically did was provide a mechanical way to rotate among a large number of ciphers. The rotation was not random, but the large number of ciphers that were available could prevent depth from occurring within messages and (if the machines were used properly) among messages. We will examine Enigma, which was broken by Polish mathematicians in the 1930s and by the British during World War II. The Japanese Purple machine, which was used to transmit diplomatic messages, was broken by William Friedman’s cryptanalysts. -

The the Enigma Enigma Machinemachine
TheThe EnigmaEnigma MachineMachine History of Computing December 6, 2006 Mike Koss Invention of Enigma ! Invented by Arthur Scherbius, 1918 ! Adopted by German Navy, 1926 ! Modified military version, 1930 ! Two Additional rotors added, 1938 How Enigma Works Scrambling Letters ! Each letter on the keyboard is connected to a lamp letter that depends on the wiring and position of the rotors in the machine. ! Right rotor turns before each letter. How to Use an Enigma ! Daily Setup – Secret settings distributed in code books. ! Encoding/Decoding a Message Setup: Select (3) Rotors ! We’ll use I-II-III Setup: Rotor Ring Settings ! We’ll use A-A-A (or 1-1-1). Rotor Construction Setup: Plugboard Settings ! We won’t use any for our example (6 to 10 plugs were typical). Setup: Initial Rotor Position ! We’ll use “M-I-T” (or 13-9-20). Encoding: Pick a “Message Key” ! Select a 3-letter key (or indicator) “at random” (left to the operator) for this message only. ! Say, I choose “M-C-K” (or 13-3-11 if wheels are printed with numbers rather than letters). Encoding: Transmit the Indicator ! Germans would transmit the indicator by encoding it using the initial (daily) rotor position…and they sent it TWICE to make sure it was received properly. ! E.g., I would begin my message with “MCK MCK”. ! Encoded with the daily setting, this becomes: “NWD SHE”. Encoding: Reset Rotors ! Now set our rotors do our chosen message key “M-C-K” (13-3-11). ! Type body of message: “ENIGMA REVEALED” encodes to “QMJIDO MZWZJFJR”. -
Practical Aspects of Modern Cryptography
University of Washington CSEP 590TU – Practical Aspects of Modern Cryptography Instructors: Josh Benaloh, Brian LaMacchia, John Manferdelli Tuesdays: 6:30-9:30, Allen Center 305 Webpage: http://www.cs.washington.edu/education/courses/csep590/06wi/ Recommended texts: Stinson, Cryptography, Theory and Practice. 2nd Edition, CRC Press, 2002. Menezes, vanOrtshot, Vanstone. Handbook of Applied Cryptography. Ferguson and Schneier, Practical Cryptography. JLM 20060107 22:16 1 New Lecture Schedule Date Topic Lecturer 1 1/3 Practical Aspects of Cryptography Josh 2 1/10 Symmetric Key Ciphers and Hashes John 3 1/17 Public Key Ciphers Josh 4 1/24 Cryptographic Protocols I Brian 5 1/31 Cryptographic Protocols II Brian 6 2/7 Security of Block Ciphers John 7 2/14 AES and Cryptographic Hashes John 8 2/21 Trust, PKI, Key Management [Last HW Brian Assignment) 9 3/1 Random Numbers/Elliptic Curve Crypto Josh 10 3/8 Three topics: Elections, ITAR/Politics, Side All Channels/Timing Attacks, DRM, BigNum Implementation JLM 20060107 22:16 2 Symmetric Key Cryptography and Cryptographic Hashes - I John Manferdelli [email protected] [email protected] Portions © 2004-2005, John Manferdelli. This material is provided without warranty of any kind including, without limitation, warranty of non-infringement or suitability for any purpose. This material is not guaranteed to be error free and is intended for instructional use only. JLM 20060107 22:16 3 Communications Engineers Coat of Arms The Source Sender: Alice Noisy insecure channel Plaintext Compress Encrypt Encode (P) (to save space) (for confidentiality) (to correct errors) The Sink Receiver:Bob Noisy insecure channel Decode Decrypt Decompress Plaintext (for confidentiality) (to correct errors) (to save space) (P) JLM 20060107 22:16 4 Symmetric Encryption Plaintext (P) Encrypt Ciphertext (C) E (P) Key (k) k Ciphertext (C) Decrypt Plaintext (P) D (P) Key (k) k • Symmetric Key cryptographic algorithms use a secret known to the authorized parties called a “key”. -

ISA 562 Information Security Theory & Practice
ISA 562 Information Security Theory & Practice Introduction to Cryptography Agenda • Basics & Definitions • Classical Cryptography • Symmetric (Secret Key) Cryptography • DES (Data Encryption Standard) • Multiple Encryptions • Modes of Block Cipher Operations • Math Essential • Asymmetric (Public Key) Cryptography 2 1 Basics & Definitions Security Concepts (I) • Confidentiality – Prevent information from being exposed to unintended party – Ex: An employee should not come to know the salary of his manager • Integrity – Assure that the information has not been tempered – Ex: An employee should not be able to modify the employee's own salary • Identity – Assure that the party of concern is authentic - it is what it claims to be – Ex: An employee should be able to uniquely identify and authenticate himself/herself 4 2 Security Concepts (II) • Availability – Assure that unused service or resource is available to legitimate users – Ex: Paychecks should be printed on time as stipulated by law • Anonymity – Assure that the identity of some party is remain anonymous – Ex: The manager should not know who had a critical review of him • Non-Repudiation – Assure that authenticated party has indeed done something that cannot be denied – Ex: Once the employee has cashed his paycheck, he can’t deny it. 5 Cryptography • Crypt = secret • Graph = writing • Cryptography is the science / art of transforming meaningful information into unintelligible text Becoming a science that relies on mathematics (number theory, algebra) • Cryptanalysis is the science / art of breaking cryptographic codes • Cryptology is the science / art / study of both cryptography and cryptanalysis 6 3 Applications of Cryptography • Assuring document integrity • Assuring document confidentiality • Authenticating parties • Document signature • Non-repudiation • Secure transactions • Exchanging keys • Sharing Secrets • Digital cash • Preserving anonymity • Copyright protection • More . -
Work Load of the Maintenance Branch
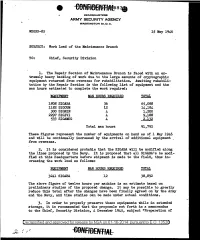
HEADQUARTERS ARMY SECURITY AGENCY WASHINGTON 25, D. C. WDGSS-85 15 May 1946 SUBJECT: Work Load of the Maintenance Branch TO: Chief, Security Division 1. The Repair Section of Maintenance Branch is .faced with an ex tremely heavy backlog of' work due to the large amounts of' cryptographic equipment returned from overseas for rehabilitation. Awaiting rehabili tation by the Repair Section is the followi~g list of equipment and the man hours estimated to complete the work required.: EQUIPMENT MAN HOURS REQUIRED TOTAL 1808 SIGABA 36 65,088 1182 SIGCUM 12 14,184 300 SIGNIN 4 1,200 2297 SIGIVI 4 9,188 533 SIGAMUG 4, 2,132 Total man hours 91,792 These figures represent the number of equipments on hand as of 1 May 1946 and will be continually increased by the arrival of additional equipment . from overseas. 2. It is considered probable that the SIGABA will be modified along the lines proposed by the Navy. It is proposed that all SIGABA 1s be modi fied at this Headquarters before shipment is made to the field, thus in creasing the work load as follows: EQUIPMENT MAN HOURS REQUIRED 3241 SIGABA 12 The above figure of' twelve hours per machine is an estimate based on preliminary studies of' the proposed change. It may be possible to greatly reduce this total af'ter the changes have been f inaJ.ly agreed on by the .Army and the Navy, and time studies can be made under actual conditions. ,3. In order to properly preserve these equipments while in extended storage, it is recommended that the proposals set .forth in a memorandum to the Chief, Security Division, 4 December 1945, subject "Preparation of Declassified and approved for release by NSA on 01-16-2014 pursuantto E .0. -
The Mathematics of the Enigma Machine Student: Emily Yale Supervisor: Dr Tariq Jarad
The Mathematics of the Enigma Machine Student: Emily Yale Supervisor: Dr Tariq Jarad The Enigma Machine is a mechanical encryption device used mainly by the German Forces during WWII to turn plaintext into complex ciphertext, the same machine could be used to do the reverse (Trappe and Washington, 2006). Invented by the German engineer Arthur Scherbius at the end of World War I the cipher it produced was marketed as ‘unbreakable’ (Trappe and Washington, 2006). Adopted by the German military forces, it worked by layering a number of substitution ciphers that were decided by an excess of 1.589x1021 machine settings. With help from Polish and French mathematicians, the cryptographer named Alan Turing created a machine known as the ‘Bombe’ which helped to reduce the time taken to ‘break’ an Enigma cipher (Imperial War Museums, 2015). The report this poster is based on focuses on the mathematics of the Enigma machine as well as the methods used to find the settings for a piece of ciphertext. Advantages and disadvantages of the Enigma code will be explored, alternative cipher machines are considered. Aims and Objective Bombe (Group Theory) • A brief insight into Cryptography The Bombe was a machine that could be used to find the key to an • The history of the Enigma Machine Enigma cipher. It was modelled on the Polish machine, Bomba, which • The mechanism of the Enigma Machine could also do same before Enigma was enhanced. Bombe could find the • The mathematics of the Bombe settings on an Enigma machine that had been used to encrypt a • Understanding Group Theory ciphertext. -

Communication Intelligence and Security, William F Friedman
UNCLASSIFIED DATE: 26 April 1960 NAME: Friedman, William F. PLACE: Breckinridge Hall, Marine Corp School TITLE: Communications Intelligence and Security Presentation Given to Staff and Students; Introduction by probably General MILLER (NFI) Miller: ((TR NOTE: Introductory remarks are probably made by General Miller (NFI).)) Gentleman, I…as we’ve grown up, there have been many times, I suppose, when we’ve been inquisitive about means of communication, means of finding out what’s going on. Some of us who grew up out in the country used to tap in on a country telephone line and we could find out what was going on that way—at least in the neighborhood. And then, of course, there were always a few that you’d read about in the newspaper who would carry this a little bit further and read some of your neighbor’s mail by getting at it at the right time, and reading it and putting it back. Of course, a good many of those people ended up at a place called Fort Leavenworth. This problem of security of information is with us in the military on a [sic] hour-to-hour basis because it’s our bread and butter. It’s what we focus on in the development of our combat plans in an attempt to project these plans onto an enemy and defeat him. And so, we use a good many devices. We spend a tremendous amount of effort and money in attempting to keep our secrets in fact secret—at least at the echelon where we feel this is necessary. -

SIS and Cipher Machines: 1930 – 1940
SIS and Cipher Machines: 1930 – 1940 John F Dooley Knox College Presented at the 14th Biennial NSA CCH History Symposium, October 2013 This work is licensed under a Creative Commons Attribution-NonCommercial-ShareAlike 3.0 United States License. 1 Thursday, November 7, 2013 1 The Results of Friedman’s Training • The initial training regimen as it related to cipher machines was cryptanalytic • But this detailed analysis of the different machine types informed the team’s cryptographic imaginations when it came to creating their own machines 2 Thursday, November 7, 2013 2 The Machines • Wheatstone/Plett Machine • M-94 • AT&T machine • M-138 and M-138-A • Hebern cipher machine • M-209 • Kryha • Red • IT&T (Parker Hitt) • Purple • Engima • SIGABA (M-134 and M-134-C) • B-211(and B-21) 3 Thursday, November 7, 2013 3 The Wheatstone/Plett Machine • polyalphabetic cipher disk with gearing mechanism rotates the inner alphabet. • Plett’s improvement is to add a second key and mixed alphabet to the inner ring. • Friedman broke this in 1918 Principles: (a) The inner workings of a mechanical cryptographic device can be worked out using a paper and pencil analog of the device. (b) if there is a cycle in the mechanical device (say for particular cipher alphabets), then that cycle can be discovered by analysis of the paper and pencil analog. 4 Thursday, November 7, 2013 4 The Army M-94 • Traces its roots back to Jefferson and Bazieres • Used by US Army from 1922 to circa 1942 • 25 mixed alphabets. Disk order is the key. -

Gendering Decryption - Decrypting Gender
1 Gendering decryption - decrypting gender The gender discourse of labour at Bletchley Park 1939-1945 Photograph taken from Smith 2011. Spring 2013 MA thesis (30 hp) Author: Annie Burman Supervisor: Mikael Byström Seminar leader: Torkel Jansson Date of seminar: 4 June 2013 2 Abstract Ever since the British efforts to break Axis codes and ciphers during the Second World War were declassified in the 1970s, the subject of Government Code and Cipher School, the organisation responsible, Bletchley Park, its wartime headquarters, and the impact of the intelligence on the war has fascinated both historians and the general public. However, little attention has been paid to Bletchley Park as a war station where three-quarters of the personnel was female. The purpose of this thesis is to explore the gender discourse of labour at Bletchley Park and how it relates to the wider context of wartime Britain. This is done through the theoretical concepts of gendering (the assignation of a gender to a job, task or object), horizontal gender segregation (the custom of assigning men and women different jobs) and vertical gender segregation (the state where men hold more prestigious positions in the hierarchy than women). The primary sources are interviews, letters and memoirs by female veterans of Bletchley Park, kept in Bletchley Park Trust Archive and the Imperial War Museum’s collections, and printed accounts, in total two monographs and five articles. Surviving official documents from Bletchley Park, now kept in the National Archives, are also utilised. Using accounts created by female veterans themselves as the main source material allows for women’s perspectives to be acknowledged and examined. -

A Complete Bibliography of Publications in Cryptologia
A Complete Bibliography of Publications in Cryptologia Nelson H. F. Beebe University of Utah Department of Mathematics, 110 LCB 155 S 1400 E RM 233 Salt Lake City, UT 84112-0090 USA Tel: +1 801 581 5254 FAX: +1 801 581 4148 E-mail: [email protected], [email protected], [email protected] (Internet) WWW URL: http://www.math.utah.edu/~beebe/ 04 September 2021 Version 3.64 Title word cross-reference 10016-8810 [?, ?]. 1221 [?]. 125 [?]. 15.00/$23.60.0 [?]. 15th [?, ?]. 16th [?]. 17-18 [?]. 18 [?]. 180-4 [?]. 1812 [?]. 18th (t; m)[?]. (t; n)[?, ?]. $10.00 [?]. $12.00 [?, ?, ?, ?, ?]. 18th-Century [?]. 1930s [?]. [?]. 128 [?]. $139.99 [?]. $15.00 [?]. $16.95 1939 [?]. 1940 [?, ?]. 1940s [?]. 1941 [?]. [?]. $16.96 [?]. $18.95 [?]. $24.00 [?]. 1942 [?]. 1943 [?]. 1945 [?, ?, ?, ?, ?]. $24.00/$34 [?]. $24.95 [?, ?]. $26.95 [?]. 1946 [?, ?]. 1950s [?]. 1970s [?]. 1980s [?]. $29.95 [?]. $30.95 [?]. $39 [?]. $43.39 [?]. 1989 [?]. 19th [?, ?]. $45.00 [?]. $5.95 [?]. $54.00 [?]. $54.95 [?]. $54.99 [?]. $6.50 [?]. $6.95 [?]. $69.00 2 [?, ?]. 200/220 [?]. 2000 [?]. 2004 [?, ?]. [?]. $69.95 [?]. $75.00 [?]. $89.95 [?]. th 2008 [?]. 2009 [?]. 2011 [?]. 2013 [?, ?]. [?]. A [?]. A3 [?, ?]. χ [?]. H [?]. k [?, ?]. M 2014 [?]. 2017 [?]. 2019 [?]. 20755-6886 [?, ?]. M 3 [?]. n [?, ?, ?]. [?]. 209 [?, ?, ?, ?, ?, ?]. 20th [?]. 21 [?]. 22 [?]. 220 [?]. 24-Hour [?, ?, ?]. 25 [?, ?]. -Bit [?]. -out-of- [?, ?]. -tests [?]. 25.00/$39.30 [?]. 25.00/839.30 [?]. 25A1 [?]. 25B [?]. 26 [?, ?]. 28147 [?]. 28147-89 000 [?]. 01Q [?, ?]. [?]. 285 [?]. 294 [?]. 2in [?, ?]. 2nd [?, ?, ?, ?]. 1 [?, ?, ?, ?]. 1-4398-1763-4 [?]. 1/2in [?, ?]. 10 [?]. 100 [?]. 10011-4211 [?]. 3 [?, ?, ?, ?]. 3/4in [?, ?]. 30 [?]. 310 1 2 [?, ?, ?, ?, ?, ?, ?]. 312 [?]. 325 [?]. 3336 [?, ?, ?, ?, ?, ?]. affine [?]. [?]. 35 [?]. 36 [?]. 3rd [?]. Afluisterstation [?, ?]. After [?]. Aftermath [?]. Again [?, ?]. Against 4 [?]. 40 [?]. 44 [?]. 45 [?]. 45th [?]. 47 [?]. [?, ?, ?, ?, ?, ?, ?, ?, ?, ?, ?, ?, ?]. Age 4in [?, ?]. [?, ?]. Agencies [?]. Agency [?, ?, ?, ?, ?, ?, ?, ?, ?, ?, ?].