Middle History of Logic Programming
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Panel: Large Knowledge Bases
From: AAAI Technical Report SS-02-06. Compilation copyright © 2002, AAAI (www.aaai.org). All rights reserved. Panel: Large KnowledgeBases AdamPease (Teknowledge, chair), Chris Welty (Vassar College), Pat Hayes (U. West Florida), Anthony G. Cohn (U. Leeds), Ken Murray (SRI) Fellbaum, C. (1998). WordNet, An Electronic Lexical Database. MITPress. Abstract Lenat, D., 1995, "Cyc: A Large-Scale Investment in It is estimated that 1-2 exabytes of data is now being KnowledgeInfrastructure". Communicationsof the ACM generated each year, almost all of it in purely digital form 38, no. 1 !, November.See also http://www.c¥c.com (Lymanet. ai. 2000). Properly structured, this information could form a global knowledge base. Currently however, Lyman,P., Varian, H., Dunn, J., Strygin, A., Swearingen, this information exists in manydifferent forms, manyof K., (2000). HowMuch Information?, University California, which are only suitable for humanconsumption, and which Berkeley are largely opaque to computerbased understanding. Majorefforts to build large formal ontologies or address http://www.sims.berkeley.edu/research/project.,ghow-much- issues in their construction have been undertaken funded by info the government in the US such as the DARPAKnowledge Niles, I., & Pease, A., (2001), Towarda Standard Upper Sharing Effort (Patil et al, 1992), High Performance Ontology, in Proceedings of the 2nd International KnowledgeBases (Cohen et. al., 1998), Rapid Knowledge Conference on Formal Ontology in Information Systems Formation (RKF, 2002) and in Europe including Advanced (FOIS-2001). See also http:llonlology.teknowledge.com KnowledgeTechnologies (Shadboit, 2001) and OntoWeb and http:l/suo.ieee.org (OntoWeb,2002), as international standards efforts such the IEEE Standard Upper Ontology (Niles & Pease, 2001) OntoWeb(2002). -

Deduction Systems Based on Resolution, We Limit the Following Considerations to Transition Systems Based on Analytic Calculi
Author’s Address Norbert Eisinger European Computer–Industry Research Centre, ECRC Arabellastr. 17 D-8000 M¨unchen 81 F. R. Germany [email protected] and Hans J¨urgen Ohlbach Max–Planck–Institut f¨ur Informatik Im Stadtwald D-6600 Saarbr¨ucken 11 F. R. Germany [email protected] Publication Notes This report appears as chapter 4 in Dov Gabbay (ed.): ‘Handbook of Logic in Artificial Intelligence and Logic Programming, Volume I: Logical Foundations’. It will be published by Oxford University Press, 1992. Fragments of the material already appeared in chapter two of Bl¨asis & B¨urckert: Deduction Systems in Artificial Intelligence, Ellis Horwood Series in Artificial Intelligence, 1989. A draft version has been published as SEKI Report SR-90-12. The report is also published as an internal technical report of ECRC, Munich. Acknowledgements The writing of the chapters for the handbook has been a highly coordinated effort of all the people involved. We want to express our gratitude for their many helpful contributions, which unfortunately are impossible to list exhaustively. Special thanks for reading earlier drafts and giving us detailed feedback, go to our second reader, Bob Kowalski, and to Wolfgang Bibel, Elmar Eder, Melvin Fitting, Donald W. Loveland, David Plaisted, and J¨org Siekmann. Work on this chapter started when both of us were members of the Markgraf Karl group at the Universit¨at Kaiserslautern, Germany. With our former colleagues there we had countless fruitful discus- sions, which, again, cannot be credited in detail. During that time this research was supported by the “Sonderforschungsbereich 314, K¨unstliche Intelligenz” of the Deutsche Forschungsgemeinschaft (DFG). -
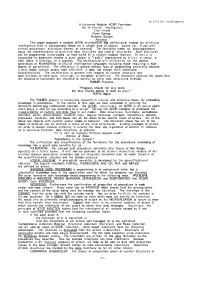
A Universal Modular ACTOR Formalism for Artificial
Artificial Intelligence A Universal Modular ACTOR Formalism for Artificial Intelligence Carl Hewitt Peter Bishop Richard Steiger Abstract This paper proposes a modular ACTOR architecture and definitional method for artificial intelligence that is conceptually based on a single kind of object: actors [or, if you will, virtual processors, activation frames, or streams]. The formalism makes no presuppositions about the representation of primitive data structures and control structures. Such structures can be programmed, micro-coded, or hard wired 1n a uniform modular fashion. In fact it is impossible to determine whether a given object is "really" represented as a list, a vector, a hash table, a function, or a process. The architecture will efficiently run the coming generation of PLANNER-like artificial intelligence languages including those requiring a high degree of parallelism. The efficiency is gained without loss of programming generality because it only makes certain actors more efficient; it does not change their behavioral characteristics. The architecture is general with respect to control structure and does not have or need goto, interrupt, or semaphore primitives. The formalism achieves the goals that the disallowed constructs are intended to achieve by other more structured methods. PLANNER Progress "Programs should not only work, but they should appear to work as well." PDP-1X Dogma The PLANNER project is continuing research in natural and effective means for embedding knowledge in procedures. In the course of this work we have succeeded in unifying the formalism around one fundamental concept: the ACTOR. Intuitively, an ACTOR is an active agent which plays a role on cue according to a script" we" use the ACTOR metaphor to emphasize the inseparability of control and data flow in our model. -

A Critique of Pure Reason’
151 A critique of pure reason’ DREWMCDERMOTT Yale University, New Haven, CT 06S20, U.S.A. Cornput. Intell. 3. 151-160 (1987) In 1978, Patrick Hayes promulgated the Naive Physics Man- the knowledge that programs must have before we write the ifesto. (It finally appeared as an “official” publication in programs themselves. We know what this knowledge is; it’s Hobbs and Moore 1985.) In this paper, he proposed that an all- what everybody knows, about physics, about time and space, out effort be mounted to formalize commonsense knowledge, about human relationships and behavior. If we attempt to write using first-order logic as a notation. This effort had its roots in the programs first, experience shows that the knowledge will earlier research, especially the work of John McCarthy, but the be shortchanged. The tendency will be to oversimplify what scope of Hayes’s proposal was new and ambitious. He sug- people actually know in order to get a program that works. On gested that the use of Tarskian seniantics could allow us to the other hand, if we free ourselves from the exigencies of study a large volume of knowledge-representation problems hacking, then we can focus on the actual knowledge in all its free from the confines of computer programs. The suggestion complexity. Once we have a rich theory of the commonsense inspired a small community of people to actually try to write world, we can try to embody it in programs. This theory will down all (or most) of commonsense knowledge in predictate become an indispensable aid to writing those programs. -

Functional and Logic Programming - Wolfgang Schreiner
COMPUTER SCIENCE AND ENGINEERING - Functional and Logic Programming - Wolfgang Schreiner FUNCTIONAL AND LOGIC PROGRAMMING Wolfgang Schreiner Research Institute for Symbolic Computation (RISC-Linz), Johannes Kepler University, A-4040 Linz, Austria, [email protected]. Keywords: declarative programming, mathematical functions, Haskell, ML, referential transparency, term reduction, strict evaluation, lazy evaluation, higher-order functions, program skeletons, program transformation, reasoning, polymorphism, functors, generic programming, parallel execution, logic formulas, Horn clauses, automated theorem proving, Prolog, SLD-resolution, unification, AND/OR tree, constraint solving, constraint logic programming, functional logic programming, natural language processing, databases, expert systems, computer algebra. Contents 1. Introduction 2. Functional Programming 2.1 Mathematical Foundations 2.2 Programming Model 2.3 Evaluation Strategies 2.4 Higher Order Functions 2.5 Parallel Execution 2.6 Type Systems 2.7 Implementation Issues 3. Logic Programming 3.1 Logical Foundations 3.2. Programming Model 3.3 Inference Strategy 3.4 Extra-Logical Features 3.5 Parallel Execution 4. Refinement and Convergence 4.1 Constraint Logic Programming 4.2 Functional Logic Programming 5. Impacts on Computer Science Glossary BibliographyUNESCO – EOLSS Summary SAMPLE CHAPTERS Most programming languages are models of the underlying machine, which has the advantage of a rather direct translation of a program statement to a sequence of machine instructions. Some languages, however, are based on models that are derived from mathematical theories, which has the advantages of a more concise description of a program and of a more natural form of reasoning and transformation. In functional languages, this basis is the concept of a mathematical function which maps a given argument values to some result value. -

Oliver Knill: March 2000 Literature: Peter Norvig, Paradigns of Artificial Intelligence Programming Daniel Juravsky and James Martin, Speech and Language Processing
ENTRY ARTIFICIAL INTELLIGENCE [ENTRY ARTIFICIAL INTELLIGENCE] Authors: Oliver Knill: March 2000 Literature: Peter Norvig, Paradigns of Artificial Intelligence Programming Daniel Juravsky and James Martin, Speech and Language Processing Adaptive Simulated Annealing [Adaptive Simulated Annealing] A language interface to a neural net simulator. artificial intelligence [artificial intelligence] (AI) is a field of computer science concerned with the concepts and methods of symbolic knowledge representation. AI attempts to model aspects of human thought on computers. Aspectrs of AI: computer vision • language processing • pattern recognition • expert systems • problem solving • roboting • optical character recognition • artificial life • grammars • game theory • Babelfish [Babelfish] Online translation system from Systran. Chomsky [Chomsky] Noam Chomsky is a pioneer in formal language theory. He is MIT Professor of Linguistics, Linguistic Theory, Syntax, Semantics and Philosophy of Language. Eliza [Eliza] One of the first programs to feature English output as well as input. It was developed by Joseph Weizenbaum at MIT. The paper appears in the January 1966 issue of the "Communications of the Association of Computing Machinery". Google [Google] A search engine emerging at the end of the 20'th century. It has AI features, allows not only to answer questions by pointing to relevant webpages but can also do simple tasks like doing arithmetic computations, convert units, read the news or find pictures with some content. GPS [GPS] General Problem Solver. A program developed in 1957 by Alan Newell and Herbert Simon. The aim was to write a single computer program which could solve any problem. One reason why GPS was destined to fail is now at the core of computer science. -
Mutation COS 326 Speaker: Andrew Appel Princeton University
Mutation COS 326 Speaker: Andrew Appel Princeton University slides copyright 2020 David Walker and Andrew Appel permission granted to reuse these slides for non-commercial educational purposes C structures are mutable, ML structures are immutable C program OCaml program let fst(x:int,y:int) = x struct foo {int x; int y} *p; let p: int*int = ... in int a,b,u; let a = fst p in a = p->x; let u = f p in u = f(p); let b = fst p in b = p->x; xxx (* does a==b? Yes! *) /* does a==b? maybe */ 2 Reasoning about Mutable State is Hard mutable set immutable set insert i s1; let s1 = insert i s0 in f x; f x; member i s1 member i s1 Is member i s1 == true? … – When s1 is mutable, one must look at f to determine if it modifies s1. – Worse, one must often solve the aliasing problem. – Worse, in a concurrent setting, one must look at every other function that any other thread may be executing to see if it modifies s1. 3 Thus far… We have considered the (almost) purely functional subset of OCaml. – We’ve had a few side effects: printing & raising exceptions. Two reasons for this emphasis: – Reasoning about functional code is easier. • Both formal reasoning – equationally, using the substitution model – and informal reasoning • Data structures are persistent. – They don’t change – we build new ones and let the garbage collector reclaim the unused old ones. • Hence, any invariant you prove true stays true. – e.g., 3 is a member of set S. -

By Robert Kowalski
Edinburgh Research Explorer Review of "Computational logic and human thinking: How to be artificially intelligent" by Robert Kowalski Citation for published version: Bundy, A 2012, 'Review of "Computational logic and human thinking: How to be artificially intelligent" by Robert Kowalski', Artificial Intelligence, vol. 191-192, pp. 96-97. https://doi.org/10.1016/j.artint.2012.05.006 Digital Object Identifier (DOI): 10.1016/j.artint.2012.05.006 Link: Link to publication record in Edinburgh Research Explorer Document Version: Early version, also known as pre-print Published In: Artificial Intelligence General rights Copyright for the publications made accessible via the Edinburgh Research Explorer is retained by the author(s) and / or other copyright owners and it is a condition of accessing these publications that users recognise and abide by the legal requirements associated with these rights. Take down policy The University of Edinburgh has made every reasonable effort to ensure that Edinburgh Research Explorer content complies with UK legislation. If you believe that the public display of this file breaches copyright please contact [email protected] providing details, and we will remove access to the work immediately and investigate your claim. Download date: 27. Sep. 2021 Review of \Computational Logic and Human Thinking: How to be Artificially Intelligent" by Robert Kowalski Alan Bundy School of Informatics, University of Edinburgh, Informatics Forum, 10 Crichton St, Edinburgh, EH8 9AB, Scotland 1 August 2012 Abstract This is a review of the book \Computational Logic and Human Thinking: How to be Artificially Intelligent" by Robert Kowalski. Keywords: computational logic, human thinking, book review. -

An Algebraic Theory of Actors and Its Application to a Simple Object-Based Language
An Algebraic Theory of Actors and Its Application to a Simple Object-Based Language Gul Agha and Prasanna Thati University of Illinois at Urbana-Champaign, USA {agha,thati}@cs.uiuc.edu http://osl.cs.uiuc.edu/ 1 Introduction The development of Simula by Ole-Johan Dahl and Kristen Nygaard introduced a number of important programming language concepts – object which supports modularity in programming through encapsulation of data and procedures, the concept of class which organizes behavior and supports Abstract Data Types, and the concept inheritance which provides subtyping relations and reuse [6]. Peter Wegner terms programming languages which use objects as object-based languages, and reserves the term object-oriented languages for languages which also support classes and inheritance [58]. Concurrency provides a natural model for the execution of objects: in fact, Simula uses co-routines to simulate a simple form of concurrency in a sequen- tial execution environment. The resulting execution is tightly synchronized and, while this execution model is appropriate for simulations which use a global virtual clock, it is not an adequate model for distributed systems. The Actor Model unifies the notion of objects with concurrency; an actor is a concurrent object which operates asynchronously and interacts with other actors by sending asynchronous messages [2]. Many models for concurrent and distributed computation have been devel- oped. An early and influential model is Petri Nets developed by Carl Adam Petri [44]. In the Petri Net model, there are two kinds of elements – nodes and tokens. Nodes are connected to other nodes by fixed (static) links. Tokens are passed be- tween nodes using these links. -

Belgium a Logic Meta-Programming Framework for Supporting The
Vrije Universiteit Brussel - Belgium Faculty of Sciences In Collaboration with Ecole des Mines de Nantes - France 2003 ERSITEIT IV B N R U U S E S J I E R L V S C S I E A N R B T E IA N VIN TE CERE ECOLE DES MINES DE NANTES A Logic Meta-Programming Framework for Supporting the Refactoring Process A Thesis submitted in partial fulfillment of the requirements for the degree of Master of Science in Computer Science (Thesis research conducted in the EMOOSE exchange) By: Francisca Mu˜nozBravo Promotor: Prof. Dr. Theo D’Hondt (Vrije Universiteit Brussel) Co-Promotors: Dr. Tom Tourw´eand Dr. Tom Mens (Vrije Universiteit Brussel) Abstract The objective of this thesis is to provide automated support for recognizing design flaws in object oriented code, suggesting proper refactorings and performing automatically the ones selected by the user. Software suffers from inevitable changes throughout the development and the maintenance phase, and this usually affects its internal structure negatively. This makes new changes diffi- cult to implement and the code drifts away from the original design. The introduced structural disorder can be countered by applying refactorings, a kind of code transformation that improves the internal structure without affecting the behavior of the application. There are several tools that support applying refactorings in an automated way, but little help for deciding where to apply a refactoring and which refactoring could be applied. This thesis presents an advanced refactoring tool that provides support for the earlier phases of the refactoring process, by detecting and analyzing bad code smells in a software application, proposing appropriate refactorings that solve these smells, and letting the user decide which one to apply. -

Conceptualization and Visualization of Tagging and Folksonomies
Conceptualization and Visualization of Tagging and Folksonomies Von der Fakultät für Ingenieurwissenschaften, Abteilung Informatik und Angewandte Kognitionswissenschaft der Universität Duisburg-Essen zur Erlangung des akademischen Grades Doktor der Ingenieurwissenschaften (Dr.-Ing.) genehmigte Dissertation von Steffen Lohmann aus Hamburg 1. Gutachter: Prof. Dr. Maria Paloma Díaz Pérez 2. Gutachter: Prof. Dr.-Ing. Jürgen Ziegler Tag der mündlichen Prüfung: 27.11.2013 Hinweis: Diese Dissertation ist im Rahmen eines binationalen Promotionsverfahrens (Cotutelle) in Kooperation mit der Universidad Carlos III de Madrid entstanden. Abstract Tagging has become a popular indexing method for interactive systems in the past decade. It offers a simple yet effective way for users to organize an ever increasing amount of digital information for themselves and/or others. The linked user vocabulary resulting from tagging is known as folksonomy and provides a valuable source for the retrieval and exploration of digital resources. Although several models and representations of tagging have been proposed, there is no coherent conceptualization that provides a comprehensive and pre- cise description of the concepts and relationships in the domain. Furthermore, there is little systematic research in the area of folksonomy visualization, and so folksonomies are still mainly depicted as simple tag clouds. Both problems are related, as a well-defined conceptualization is an important prerequisite for the interoperable use and visualization of folksonomies. The thesis addresses these shortcomings by developing a coherent conceptualiza- tion of tagging and visualizations for the interactive exploration of folksonomies. It gives an overview and comparison of tagging models and defines key concepts of the domain. After a comprehensive review of existing tagging ontologies, a unified and coherent conceptualization is presented that incorporates the best parts of the reviewed ontologies. -

The Method of Variable Splitting
The Method of Variable Splitting Roger Antonsen Thesis submitted to the Faculty of Mathematics and Natural Sciences at the University of Oslo for the degree of Philosophiae Doctor (PhD) Date of submission: June 30, 2008 Date of public defense: October 3, 2008 Supervisors Prof. Dr. Arild Waaler, University of Oslo Prof. Dr. Reiner H¨ahnle, Chalmers University of Technology Adjudication committee Prof. Dr. Matthias Baaz, Vienna University of Technology Prof. emer. Dr. Wolfgang Bibel, Darmstadt University of Technology Dr. Martin Giese, University of Oslo Copyright © 2008 Roger Antonsen til mine foreldre, Karin og Ingvald Table of Contents Acknowledgments vii Chapter 1 Introduction 1 1.1 Influential Ideas in Automated Reasoning2 1.2 Perspectives on Variable Splitting4 1.3 A Short History of Variable Splitting7 1.4 Delimitations and Applicability 10 1.5 Scientific Contribution 10 1.6 A Few Words of Introduction 11 1.7 Notational Conventions and Basics 12 1.8 The Contents of the Thesis 14 Chapter 2 A Tour of Rules and Inferences 15 2.1 Ground Sequent Calculus 16 2.2 Free-variable Sequent Calculus 17 2.3 Another Type of Redundancy 19 2.4 Variable-Sharing Calculi and Variable Splitting 20 Chapter 3 Preliminaries 23 3.1 Indexing 23 3.2 Indices and Indexed Formulas 24 3.3 The -relation 28 3.4 The Basic Variable-Sharing Calculus 28 3.5 Unifiers and Provability 30 3.6 Permutations 31 3.7 Conformity and Proof Invariance 35 3.8 Semantics 37 3.9 Soundness and Completeness 40 Chapter 4 Variable Splitting 41 4.1 Introductory Examples 41 4.2 Branch Names