Seismic Wave Propagation and Earth Models
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Rayleigh Sound Wave Propagation on a Gallium Single Crystal in a Liquid He3 Bath G
Rayleigh sound wave propagation on a gallium single crystal in a liquid He3 bath G. Bellessa To cite this version: G. Bellessa. Rayleigh sound wave propagation on a gallium single crystal in a liquid He3 bath. Journal de Physique Lettres, Edp sciences, 1975, 36 (5), pp.137-139. 10.1051/jphyslet:01975003605013700. jpa-00231172 HAL Id: jpa-00231172 https://hal.archives-ouvertes.fr/jpa-00231172 Submitted on 1 Jan 1975 HAL is a multi-disciplinary open access L’archive ouverte pluridisciplinaire HAL, est archive for the deposit and dissemination of sci- destinée au dépôt et à la diffusion de documents entific research documents, whether they are pub- scientifiques de niveau recherche, publiés ou non, lished or not. The documents may come from émanant des établissements d’enseignement et de teaching and research institutions in France or recherche français ou étrangers, des laboratoires abroad, or from public or private research centers. publics ou privés. L-137 RAYLEIGH SOUND WAVE PROPAGATION ON A GALLIUM SINGLE CRYSTAL IN A LIQUID He3 BATH G. BELLESSA Laboratoire de Physique des Solides (*) Université Paris-Sud, Centre d’Orsay, 91405 Orsay, France Résumé. - Nous décrivons l’observation de la propagation d’ondes élastiques de Rayleigh sur un monocristal de gallium. Les fréquences d’études sont comprises entre 40 MHz et 120 MHz et la température d’étude la plus basse est 0,4 K. La vitesse et l’atténuation sont étudiées à des tempéra- tures différentes. L’atténuation des ondes de Rayleigh par le bain d’He3 est aussi étudiée à des tem- pératures et des fréquences différentes. -
Daft Punk Collectible Sales Skyrocket After Breakup: 'I Could've Made
BILLBOARD COUNTRY UPDATE APRIL 13, 2020 | PAGE 4 OF 19 ON THE CHARTS JIM ASKER [email protected] Bulletin SamHunt’s Southside Rules Top Country YOURAlbu DAILYms; BrettENTERTAINMENT Young ‘Catc NEWSh UPDATE’-es Fifth AirplayFEBRUARY 25, 2021 Page 1 of 37 Leader; Travis Denning Makes History INSIDE Daft Punk Collectible Sales Sam Hunt’s second studio full-length, and first in over five years, Southside sales (up 21%) in the tracking week. On Country Airplay, it hops 18-15 (11.9 mil- (MCA Nashville/Universal Music Group Nashville), debutsSkyrocket at No. 1 on Billboard’s lion audience After impressions, Breakup: up 16%). Top Country• Spotify Albums Takes onchart dated April 18. In its first week (ending April 9), it earned$1.3B 46,000 in equivalentDebt album units, including 16,000 in album sales, ac- TRY TO ‘CATCH’ UP WITH YOUNG Brett Youngachieves his fifth consecutive cording• Taylor to Nielsen Swift Music/MRCFiles Data. ‘I Could’veand total Made Country Airplay No.$100,000’ 1 as “Catch” (Big Machine Label Group) ascends SouthsideHer Own marks Lawsuit Hunt’s in second No. 1 on the 2-1, increasing 13% to 36.6 million impressions. chartEscalating and fourth Theme top 10. It follows freshman LP BY STEVE KNOPPER Young’s first of six chart entries, “Sleep With- MontevalloPark, which Battle arrived at the summit in No - out You,” reached No. 2 in December 2016. He vember 2014 and reigned for nine weeks. To date, followed with the multiweek No. 1s “In Case You In the 24 hours following Daft Punk’s breakup Thomas, who figured out how to build the helmets Montevallo• Mumford has andearned Sons’ 3.9 million units, with 1.4 Didn’t Know” (two weeks, June 2017), “Like I Loved millionBen in Lovettalbum sales. -

Ellipticity of Seismic Rayleigh Waves for Subsurface Architectured Ground with Holes
Experimental evidence of auxetic features in seismic metamaterials: Ellipticity of seismic Rayleigh waves for subsurface architectured ground with holes Stéphane Brûlé1, Stefan Enoch2 and Sébastien Guenneau2 1Ménard, Chaponost, France 1, Route du Dôme, 69630 Chaponost 2 Aix Marseille Univ, CNRS, Centrale Marseille, Institut Fresnel, Marseille, France 52 Avenue Escadrille Normandie Niemen, 13013 Marseille e-mail address: [email protected] Structured soils with regular meshes of metric size holes implemented in first ten meters of the ground have been theoretically and experimentally tested under seismic disturbance this last decade. Structured soils with rigid inclusions embedded in a substratum have been also recently developed. The influence of these inclusions in the ground can be characterized in different ways: redistribution of energy within the network with focusing effects for seismic metamaterials, wave reflection, frequency filtering, reduction of the amplitude of seismic signal energy, etc. Here we first provide some time-domain analysis of the flat lens effect in conjunction with some form of external cloaking of Rayleigh waves and then we experimentally show the effect of a finite mesh of cylindrical holes on the ellipticity of the surface Rayleigh waves at the level of the Earth’s surface. Orbital diagrams in time domain are drawn for the surface particle’s velocity in vertical (x, z) and horizontal (x, y) planes. These results enable us to observe that the mesh of holes locally creates a tilt of the axes of the ellipse and changes the direction of particle movement. Interestingly, changes of Rayleigh waves ellipticity can be interpreted as changes of an effective Poisson ratio. -

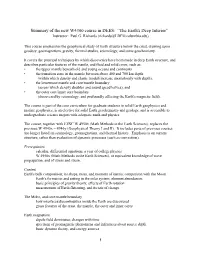
STRUCTURE of EARTH S-Wave Shadow P-Wave Shadow P-Wave
STRUCTURE OF EARTH Earthquake Focus P-wave P-wave shadow shadow S-wave shadow P waves = Primary waves = Pressure waves S waves = Secondary waves = Shear waves (Don't penetrate liquids) CRUST < 50-70 km thick MANTLE = 2900 km thick OUTER CORE (Liquid) = 3200 km thick INNER CORE (Solid) = 1300 km radius. STRUCTURE OF EARTH Low Velocity Crust Zone Whole Mantle Convection Lithosphere Upper Mantle Transition Zone Layered Mantle Convection Lower Mantle S-wave P-wave CRUST : Conrad discontinuity = upper / lower crust boundary Mohorovicic discontinuity = base of Continental Crust (35-50 km continents; 6-8 km oceans) MANTLE: Lithosphere = Rigid Mantle < 100 km depth Asthenosphere = Plastic Mantle > 150 km depth Low Velocity Zone = Partially Melted, 100-150 km depth Upper Mantle < 410 km Transition Zone = 400-600 km --> Velocity increases rapidly Lower Mantle = 600 - 2900 km Outer Core (Liquid) 2900-5100 km Inner Core (Solid) 5100-6400 km Center = 6400 km UPPER MANTLE AND MAGMA GENERATION A. Composition of Earth Density of the Bulk Earth (Uncompressed) = 5.45 gm/cm3 Densities of Common Rocks: Granite = 2.55 gm/cm3 Peridotite, Eclogite = 3.2 to 3.4 gm/cm3 Basalt = 2.85 gm/cm3 Density of the CORE (estimated) = 7.2 gm/cm3 Fe-metal = 8.0 gm/cm3, Ni-metal = 8.5 gm/cm3 EARTH must contain a mix of Rock and Metal . Stony meteorites Remains of broken planets Planetary Interior Rock=Stony Meteorites ÒChondritesÓ = Olivine, Pyroxene, Metal (Fe-Ni) Metal = Fe-Ni Meteorites Core density = 7.2 gm/cm3 -- Too Light for Pure Fe-Ni Light elements = O2 (FeO) or S (FeS) B. -

Development of an Acoustic Microscope to Measure Residual Stress Via Ultrasonic Rayleigh Wave Velocity Measurements Jane Carol Johnson Iowa State University
Iowa State University Capstones, Theses and Retrospective Theses and Dissertations Dissertations 1995 Development of an acoustic microscope to measure residual stress via ultrasonic Rayleigh wave velocity measurements Jane Carol Johnson Iowa State University Follow this and additional works at: https://lib.dr.iastate.edu/rtd Part of the Applied Mechanics Commons Recommended Citation Johnson, Jane Carol, "Development of an acoustic microscope to measure residual stress via ultrasonic Rayleigh wave velocity measurements " (1995). Retrospective Theses and Dissertations. 11061. https://lib.dr.iastate.edu/rtd/11061 This Dissertation is brought to you for free and open access by the Iowa State University Capstones, Theses and Dissertations at Iowa State University Digital Repository. It has been accepted for inclusion in Retrospective Theses and Dissertations by an authorized administrator of Iowa State University Digital Repository. For more information, please contact [email protected]. INFORMATION TO USERS This manuscript has been reproduced from the microfilm master. UMI films the text directly from the original or copy submitted. Thus, some thesis and dissertation copies are in typewriter face, while others may be from any type of computer printer. The quality of this reproduction is dependent upon the quali^ of the copy submitted. Broken or indistinct print, colored or poor quality illustrations and photographs, print bleedthrough, substandard margins, and inqvoper alignment can adversely affect reproduction. In the unlikely event that the author did not send UMI a complete manuscript and there are missing pages, these will be noted. Also, if unauthorized copyright material had to be removed, a note win indicate the deletion. Oversize materials (e.g., maps, drawings, charts) are reproduced by sectioning the original, beginning at the upper left-hand comer and continuing from left to right in equal sections with small overk^. -
Summary of the New W4300 Course in DEES: “The Earth's Deep Interior” Instructor: Paul G
Summary of the new W4300 course in DEES: “The Earth's Deep Interior” Instructor: Paul G. Richards ([email protected]) This course emphasizes the geophysical study of Earth structure below the crust, drawing upon geodesy, geomagnetism, gravity, thermal studies, seismology, and some geochemistry. It covers the principal techniques by which discoveries have been made in deep Earth structure, and describes particular features of the mantle, and fluid and solid cores, such as: • the upper mantle beneath old and young oceans and continents • the transition zone in the mantle between about 400 and 700 km depth (within which density and elastic moduli increase anomalously with depth), • the lowermost mantle and core/mantle boundary (across which density doubles and sound speed halves), and • the outer core/inner core boundary (discovered by seismology, and profoundly affecting the Earth's magnetic field). The course is part of the core curriculum for graduate students in solid Earth geophysics and marine geophysics, is an elective for solid Earth geochemistry and geology, and is accessible to undergraduate science majors with adequate math and physics. The course, together with EESC W 4950x (Math Methods in the Earth Sciences), replaces the previous W 4945x – 4946y (Geophysical Theory I and II). It includes parts of previous courses (no longer listed) in seismology, geomagnetism, and thermal history. Emphasis is on current structure, rather than evaluation of dynamic processes (such as convection). Prerequisites calculus, differential -

Seismic Wavefield Imaging of Earth's Interior Across Scales
TECHNICAL REVIEWS Seismic wavefield imaging of Earth’s interior across scales Jeroen Tromp Abstract | Seismic full- waveform inversion (FWI) for imaging Earth’s interior was introduced in the late 1970s. Its ultimate goal is to use all of the information in a seismogram to understand the structure and dynamics of Earth, such as hydrocarbon reservoirs, the nature of hotspots and the forces behind plate motions and earthquakes. Thanks to developments in high- performance computing and advances in modern numerical methods in the past 10 years, 3D FWI has become feasible for a wide range of applications and is currently used across nine orders of magnitude in frequency and wavelength. A typical FWI workflow includes selecting seismic sources and a starting model, conducting forward simulations, calculating and evaluating the misfit, and optimizing the simulated model until the observed and modelled seismograms converge on a single model. This method has revealed Pleistocene ice scrapes beneath a gas cloud in the Valhall oil field, overthrusted Iberian crust in the western Pyrenees mountains, deep slabs in subduction zones throughout the world and the shape of the African superplume. The increased use of multi- parameter inversions, improved computational and algorithmic efficiency , and the inclusion of Bayesian statistics in the optimization process all stand to substantially improve FWI, overcoming current computational or data- quality constraints. In this Technical Review, FWI methods and applications in controlled- source and earthquake seismology are discussed, followed by a perspective on the future of FWI, which will ultimately result in increased insight into the physics and chemistry of Earth’s interior. -

M-Phazes | Primary Wave Music
M- PHAZES facebook.com/mphazes instagram.com/mphazes soundcloud.com/mphazes open.spotify.com/playlist/6IKV6azwCL8GfqVZFsdDfn M-Phazes is an Aussie-born producer based in LA. He has produced records for Logic, Demi Lovato, Madonna, Eminem, Kehlani, Zara Larsson, Remi Wolf, Kiiara, Noah Cyrus, and Cautious Clay. He produced and wrote Eminem’s “Bad Guy” off 2015’s Grammy Winner for Best Rap Album of the Year “ The Marshall Mathers LP 2.” He produced and wrote “Sober” by Demi Lovato, “playinwitme” by KYLE ft. Kehlani, “Adore” by Amy Shark, “I Got So High That I Found Jesus” by Noah Cyrus, and “Painkiller” by Ruel ft Denzel Curry. M-Phazes is into developing artists and collaborates heavy with other producers. He developed and produced Kimbra, KYLE, Amy Shark, and Ruel before they broke. He put his energy into Ruel beginning at age 13 and guided him to RCA. M-Phazes produced Amy Shark’s successful songs including “Love Songs Aint for Us” cowritten by Ed Sheeran. He worked extensively with KYLE before he broke and remains one of his main producers. In 2017, Phazes was nominated for Producer of the Year at the APRA Awards alongside Flume. In 2018 he won 5 ARIA awards including Producer of the Year. His recent releases are with Remi Wolf, VanJess, and Kiiara. Cautious Clay, Keith Urban, Travis Barker, Nas, Pusha T, Anne-Marie, Kehlani, Alison Wonderland, Lupe Fiasco, Alessia Cara, Joey Bada$$, Wiz Khalifa, Teyana Taylor, Pink Sweat$, and Wale have all featured on tracks M-Phazes produced. ARTIST: TITLE: ALBUM: LABEL: CREDIT: YEAR: Come Over VanJess Homegrown (Deluxe) Keep Cool/RCA P,W 2021 Remi Wolf Sexy Villain Single Island P,W 2021 Yung Bae ft. -

Leon Russell – Primary Wave Music
ARTIST:TITLE:ALBUM:LABEL:CREDIT:YEAR:LeonThisCarneyTheW,P1972TightOutCarpentersAA&MWNow1973IfStopP1974LadyWill1975 SongI Were InRightO' Masquerade &AllBlueRussellRope The Thenfor Thata Stuff CarpenterYouWoodsWisp Jazz LEON RUSSELL facebook.com/LeonRussellMusic twitter.com/LeonRussell Imageyoutube.com/channel/UCb3- not found or type unknown mdatSwcnVkRAr3w9VBA leonrussell.com en.wikipedia.org/wiki/Leon_Russell open.spotify.com/artist/6r1Xmz7YUD4z0VRUoGm8XN The ultimate rock & roll session man, Leon Russell’s long and storied career included collaborations with a virtual who’s who of music icons spanning from Jerry Lee Lewis to Phil Spector to the Rolling Stones. A similar eclecticism and scope also surfaced in his solo work, which couched his charmingly gravelly voice in a rustic yet rich swamp pop fusion of country, blues, and gospel. Born Claude Russell Bridges on April 2, 1942, in Lawton, Oklahoma, he began studying classical piano at age three, a decade later adopting the trumpet and forming his first band. At 14, Russell lied about his age to land a gig at a Tulsa nightclub, playing behind Ronnie Hawkins & the Hawks before touring in support of Jerry Lee Lewis. Two years later, he settled in Los Angeles, studying guitar under the legendary James Burton and appearing on sessions with Dorsey Burnette and Glen Campbell. As a member of Spector’s renowned studio group, Russell played on many of the finest pop singles of the ’60s, also arranging classics like Ike & Tina Turner’s monumental “River Deep, Mountain High”; other hits bearing his input include the Byrds’ “Mr. Tambourine Man,” Gary Lewis & the Playboys’ “This Diamond Ring,” and Herb Alpert’s “A Taste of Honey.” In 1967, Russell built his own recording studio, teaming with guitarist Marc Benno to record the acclaimed Look Inside the Asylum Choir LP. -

Characteristics of Foreshocks and Short Term Deformation in the Source Area of Major Earthquakes
Characteristics of Foreshocks and Short Term Deformation in the Source Area of Major Earthquakes Peter Molnar Massachusetts Institute of Technology 77 Massachusetts Avenue Cambridge, Massachusetts 02139 USGS CONTRACT NO. 14-08-0001-17759 Supported by the EARTHQUAKE HAZARDS REDUCTION PROGRAM OPEN-FILE NO.81-287 U.S. Geological Survey OPEN FILE REPORT This report was prepared under contract to the U.S. Geological Survey and has not been reviewed for conformity with USGS editorial standards and stratigraphic nomenclature. Opinions and conclusions expressed herein do not necessarily represent those of the USGS. Any use of trade names is for descriptive purposes only and does not imply endorsement by the USGS. Appendix A A Study of the Haicheng Foreshock Sequence By Lucile Jones, Wang Biquan and Xu Shaoxie (English Translation of a Paper Published in Di Zhen Xue Bao (Journal of Seismology), 1980.) Abstract We have examined the locations and radiation patterns of the foreshocks to the 4 February 1978 Haicheng earthquake. Using four stations, the foreshocks were located relative to a master event. They occurred very close together, no more than 6 kilo meters apart. Nevertheless, there appear to have been too clusters of foreshock activity. The majority of events seem to have occurred in a cluster to the east of the master event along a NNE-SSW trend. Moreover, all eight foreshocks that we could locate and with a magnitude greater than 3.0 occurred in this group. The're also "appears to be a second cluster of foresfiocks located to the northwest of the first. Thus it seems possible that the majority of foreshocks did not occur on the rupture plane of the mainshock, which trends WNW, but on another plane nearly perpendicualr to the mainshock. -

Chapter 2 the Evolution of Seismic Monitoring Systems at the Hawaiian Volcano Observatory
Characteristics of Hawaiian Volcanoes Editors: Michael P. Poland, Taeko Jane Takahashi, and Claire M. Landowski U.S. Geological Survey Professional Paper 1801, 2014 Chapter 2 The Evolution of Seismic Monitoring Systems at the Hawaiian Volcano Observatory By Paul G. Okubo1, Jennifer S. Nakata1, and Robert Y. Koyanagi1 Abstract the Island of Hawai‘i. Over the past century, thousands of sci- entific reports and articles have been published in connection In the century since the Hawaiian Volcano Observatory with Hawaiian volcanism, and an extensive bibliography has (HVO) put its first seismographs into operation at the edge of accumulated, including numerous discussions of the history of Kīlauea Volcano’s summit caldera, seismic monitoring at HVO HVO and its seismic monitoring operations, as well as research (now administered by the U.S. Geological Survey [USGS]) has results. From among these references, we point to Klein and evolved considerably. The HVO seismic network extends across Koyanagi (1980), Apple (1987), Eaton (1996), and Klein and the entire Island of Hawai‘i and is complemented by stations Wright (2000) for details of the early growth of HVO’s seismic installed and operated by monitoring partners in both the USGS network. In particular, the work of Klein and Wright stands and the National Oceanic and Atmospheric Administration. The out because their compilation uses newspaper accounts and seismic data stream that is available to HVO for its monitoring other reports of the effects of historical earthquakes to extend of volcanic and seismic activity in Hawai‘i, therefore, is built Hawai‘i’s detailed seismic history to nearly a century before from hundreds of data channels from a diverse collection of instrumental monitoring began at HVO. -

Gji-Keyword-List-Updated2016.Pdf
COMPOSITION and PHYSICAL PROPERTIES Composition and structure of the continental crust Composition and structure of the core Composition and structure of the mantle Composition and structure of the oceanic crust Composition of the planets Creep and deformation Defects Elasticity and anelasticity Electrical properties Equations of state Fault zone rheology Fracture and flow Friction High-pressure behaviour Magnetic properties Microstructure Permeability and porosity Phase transitions Plasticity, diffusion, and creep GENERAL SUBJECTS Core Gas and hydrate systems Geomechanics Geomorphology Glaciology Heat flow Hydrogeophysics Hydrology Hydrothermal systems Instrumental noise Ionosphere/atmosphere interactions Ionosphere/magnetosphere interactions Mantle processes Ocean drilling Structure of the Earth Thermochronology Tsunamis Ultra-high pressure metamorphism Ultra-high temperature metamorphism GEODESY and GRAVITY Acoustic-gravity waves Earth rotation variations Geodetic instrumentation Geopotential theory Global change from geodesy Gravity anomalies and Earth structure Loading of the Earth Lunar and planetary geodesy and gravity Plate motions Radar interferometry Reference systems Satellite geodesy Satellite gravity Sea level change Seismic cycle Space geodetic surveys Tides and planetary waves Time variable gravity Transient deformation GEOGRAPHIC LOCATION Africa Antarctica Arctic region Asia Atlantic Ocean Australia Europe Indian Ocean Japan New Zealand North America Pacific Ocean South America GEOMAGNETISM and ELECTROMAGNETISM Archaeomagnetism