Recursive Feature Elimination and Random Forest Classification of Meadows and Dry Grasslands in Lowland River Valleys of Poland
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

THE BUG RIVER VALLEY for NATURE LOVERS Eastern Poland with a Difference
THE BUG RIVER VALLEY FOR NATURE LOVERS Eastern Poland with a difference By Olivier Dochy, Belgium From 21st until 25th of June, I got the chance to join a study visit to the valley of the Bug river on the border of Poland and Belarus, in the far east of Poland. The purpose of this visit was tot evaluate local initiatives for sustainable tourism, oriented to "riverside & country- side" tourism. This visit was organized by a Flemish-Polish exchange project with the prov- inces of West-Vlaanderen en Lubelski (Poland), but also the flemish initiative vzw De Boot (www.deboot.be). My task was to evaluate which topics in the region could be interesting for nature-lovers in general and keen nature-specialists in particular, such as birders. Well, there is a lot ! It is not like the wild expanses of the well-known Biebrza valley or the untouched forests of Bia- lowieza, but rather a small-scale (agri)cultural landscape. But it still has all the biodiversity that once flourished in Western-Europe and now all (but) disappeared. Here follow a number of tips voor those who want to visit the region. There is a lot of in- formation great and small on the internet about the region, but you have to surf a lot to find it all. Anyway, there certainly is a lot to discover for naturalists with a pioneer drive ! You can find pictures of our visit here: http://picasaweb.google.com/Odee.fotos/BugRiverPoland?feat=directlink 1 WHERE IS IT ? The province of Lubelski is in the extreme east of Poland. -

Floods in Poland from 1946 to 2001 — Origin, Territorial Extent and Frequency
Polish Geological Institute Special Papers, 15 (2004): 69–76 Proceedings of the Conference “Risks caused by the geodynamic phenomena in Europe” FLOODS IN POLAND FROM 1946 TO 2001 — ORIGIN, TERRITORIAL EXTENT AND FREQUENCY Andrzej DOBROWOLSKI1, Halina CZARNECKA1, Janusz OSTROWSKI1, Monika ZANIEWSKA1 Abstract. Based on the data concerning floods on the territory of Poland during the period 1946–2001, the reasons generating floods, the number of regional floods in the rivers catchment systems, and sites of local floods occurrence, were defined. Both types of floods: caused by riverbank overflows, and land flooding by rain or snow-melt water, were considered. In the most cases, the floods were caused by rainfall. They were connected with changes in the rainfall structure within Po- land. In each season of the year floods of various origin were observed. When the flood initiating factors appeared simulta- neously, the flood grew into a catastrophic size. In present analysis, for the first time in Poland, a large group of local floods has been distinguished. A special attention has been paid to floods caused by sudden flooding of the land (flash flood), including floods in the urban areas — more and more frequent during the recent years. The results of the analyses have provided important data for the assessment of the flood hazard in Poland, and for the creation of a complex flood control strategy for the whole country and/or for selected regions. Key words: flood, classification of floods, floods territorial extent, frequency of floods occurrence, torrential and rapid rain- fall, threat of life, material losses. Abstrakt. Na podstawie zbioru danych z lat 1946–2001 okreœlono przyczyny wystêpowania powodzi w Polsce, liczbê powodzi re- gionalnych w uk³adzie zlewni rzecznych oraz miejsca wyst¹pieñ powodzi lokalnych. -

Sediment Yields and Denudation Rates in Poland
Erosion and Sediment Yield: Global and Regional Perspectives (Proceedings of the Exeter Symposium, July 1996). IAHS Publ. no. 236, 1996. 133 Sediment yields and denudation rates in Poland JAN BRAÑSKI Research and Design Office HYDROS, ul. Somleñskiego 16 B m.58, 01 698 Warsaw, Poland KAZIMIERZ BANASIK Department of Hydraulic Structures, Warsaw Agricultural University SGGW, ul. Nowoursynowska 166, 02-787 Warsaw, Poland Abstract In Poland, there are many 40-year records of suspended sedi ment transport. These records have been used to estimate the intensity of denudation processes over the territory of Poland. The denudation index, expressed in t km’2 year’1, was calculated for many river basins, using data from 50 river gauging stations. The results are presented in the form of maps of denudation rates over the territory of Poland for four decades during the period 1951-1990. INTRODUCTION One of the first studies of the intensity of denudation processes in the Vistula river basin was carried out by Jarocki (1957). Based on hydrological measurements at the Tczew gauge during the period 1946-1953, he concluded that the average value of the denuda tion index (i.e. total sediment yield/river basin area) was 81 km’2 year’1. The first maps of the spatial differentiation of the denudation index across Poland were produced indirectly, by using a map of potential soil erosion published by Reniger (1959). Two versions of such maps were produced using this approach by Dçbski (1959) and Skibinski (1959). The results of Skibinski’s investigation, which dealt only with suspended sediment, in contrast to Dçbski’s investigation which also included bed load, showed considerable spatial differentiation of the denudation index, particularly in the zone of the south Polish uplands, with values ranging from ca 10 to 160 t km"2 year’1. -

The Crime of Genocide Committed Against the Poles by the USSR Before and During World War II: an International Legal Study, 45 Case W
Case Western Reserve Journal of International Law Volume 45 | Issue 3 2012 The rC ime of Genocide Committed against the Poles by the USSR before and during World War II: An International Legal Study Karol Karski Follow this and additional works at: https://scholarlycommons.law.case.edu/jil Part of the International Law Commons Recommended Citation Karol Karski, The Crime of Genocide Committed against the Poles by the USSR before and during World War II: An International Legal Study, 45 Case W. Res. J. Int'l L. 703 (2013) Available at: https://scholarlycommons.law.case.edu/jil/vol45/iss3/4 This Article is brought to you for free and open access by the Student Journals at Case Western Reserve University School of Law Scholarly Commons. It has been accepted for inclusion in Case Western Reserve Journal of International Law by an authorized administrator of Case Western Reserve University School of Law Scholarly Commons. Case Western Reserve Journal of International Law Volume 45 Spring 2013 Issue 3 The Crime of Genocide Committed Against the Poles by the USSR Before and During WWII: An International Legal Study Karol Karski Case Western Reserve Journal of International Law·Vol. 45·2013 The Crime of Genocide Committed Against the Poles The Crime of Genocide Committed Against the Poles by the USSR Before and During World War II: An International Legal Study Karol Karski* The USSR’s genocidal activity against the Polish nation started before World War II. For instance, during the NKVD’s “Polish operation” of 1937 and 1938, the Communist regime exterminated about 85,000 Poles living at that time on the pre- war territory of the USSR. -

Malacofauna in Oxbow Lakes of the Bug River Within the Nadbuĩaēski Landscape Park
Teka Kom. Ochr. Kszt. ĝrod. Przyr. – OL PAN, 2013, 10, 132–142 MALACOFAUNA IN OXBOW LAKES OF THE BUG RIVER WITHIN THE NADBUĩAēSKI LANDSCAPE PARK Beata Jakubik, Krzysztof Lewandowski Institute of Biology, Siedlce University of Natural Sciences and Humanities B. Prusa str. 12, 08-110 Siedlce, [email protected], [email protected] Co-financed by National Fund for Environmental Protection and Water Management Summary. Malacofauna was studies in six oxbow lakes situated in the NadbuĪaĔski Landscape Park between the outlets of two confluents of the Bug River – the Liwiec and Nurzec. The water bodies are of different hydrological regime, from throughflow to isolated lakes. From 9 to 18 mollusc taxa were noted there. Oxbow lakes connected with the Bug had a higher species richness than those long ago permanently isolated from the river. Particularly large share in malacofauna of connected oxbow lakes had bivalves of the family Unionidae, Dreissena polymorpha and snails of the family Viviparidae. Protected species were found among studied molluscs. Studies carried out in two periods 2003–2004 and 2007–2011 showed small differences in species composition of malacofauna. Key words: NadbuĪaĔski Landscape Park, oxbow lakes, molluscs INTRODUCTION The NadbuĪaĔski Landscape Park occupies a 120-km long part of natural valley of the Bug River, where a meandering river channel is accompanied by numerous oxbow lakes [Dombrowski et al. 2002]. Ecology of these oxbow lakes was poorly recognised though the interest in such water bodies has markedly increased recently. This pertains mainly to rivers of eastern Poland – the Bug and Narew [see e.g. Górniak 2001, Biesiadka and Pakulnicka 2004, Jurkiewicz- -Karnkowska 2006, 2011, Lewandowski 2006, Strzaáek 2006, GruĪewski 2008]. -
West Water Way Study Program
Preliminary Assessment of the Proposed East-West Waterway Scheme in Poland Prepared for WWF’s European Freshwater Programme by Wieslaw Dembek · Adam Jacewicz · Tomasz Okruszko Warsaw, June 2000 Prepared for WWF’s European Freshwater Programme Preliminary Assessment of the Proposed East-West Waterway Scheme in Poland Wieslaw Dembek Department for Nature Protection in Rural Areas Institute for Land Reclamation and Grassland Farming in Falenty Adam Jacewicz HYDROPROJEKT Warsaw Tomasz Okruszko Department of Hydraulic Engineering Warsaw Agricultural University Warszawa, June 2000 Cover photographs J Madgwick, WWF European Freshwater Programme Top – Middle Vistula River Bottom – River Bug Preface This report was prepared by three independent Polish experts in the fields of ecology, hydro- engineering and hydrology on behalf of WWF Internationals’ European Freshwater Programme. It was commissioned due to the growing concerns by WWF, IUCN and Polish environmental NGO’s regarding plans for the development of the Vistula, Odra, Warta, Notec and Bug rivers in the context of an East-West waterway scheme. This waterway scheme is currently under consideration by the Transport Infrastructure Needs Assessment group for the European Commission, (TINA) that assesses transport needs for EU Accession countries. It is considered by many that the engineering works necessary for the East-West waterway development could be devastating for rivers and wetlands in central and eastern Europe. In recognition of this threat, Resolution VII.12 of the Conference of Contracting Parties of the Ramsar Convention on Wetlands COP7 (1999) called on the States concerned "to undertake a full review and assessment of these impacts, in accordance with international transboundary impact assessment procedures". -
Waterways – in Reference to the Previous Comments
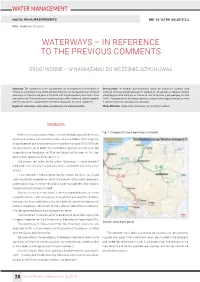
WATER MANAGEMENT mgr inż. Marek MAZURKIEWICZ DOI: 10.15199/180.2019.2.5 MSc. water construction WATERWAYS – IN REFERENCE TO THE PREVIOUS COMMENTS DROGI WODNE – W NAWIĄZANIU DO WCZEŚNIEJSZYCH UWAG Summary: The comments to the assumptions for development of waterways in Streszczenie: W artykule przedstawiono uwagi do zamierzeń rozwoju dróg Poland, as submitted in the article entitled „Expertise on the development of inland wodnych w Polsce przedstawionych w artykule pt. „Ekspertyza w zakresie rozwoju waterways in Poland in the years 2016-2020 with the perspectives up to 2030” have śródlądowych dród wodnych w Polsce na lata 2016-2020 z perspektywą do roku been presented. The conception of implementing another (authorial) solution together 2030”. Zaproponowano koncepcję realizacji innego (autorskiego) rozwiązania wraz with the arguments, supporting the mentioned proposals has been suggested. z argumentacją uzasadniającą te propozycje. Keywords: waterways, conceptions, perspectives for implementation Słowa kluczowe: drogi wodne, koncepcje, perspektywy realizacji Introduction Fig. 1. Category E inland waterways in Poland When formulating the comments, I utilized the elaboration of the Ministry of Marine Economy and Inland Navigation, dating to 2006 entitled “Expertise on development of inland waterways in Poland in the years 2016-2020 with the perspectives up to 2030”. The mentioned expertise was the basis for undertaking the Resolution no 79 of the Council of Ministers of 14, June 2016 (Polish Monitor of 2016, item 711). The present text refers to the article “Waterways – some remarks” published in the monthly “Gospodarka Wodna” no 6/2019 and to my earlier articles. I have worked in hydro engineering for almost 60 years, so, based upon my previous experience I confirm the maxim of my older colleagues- professionals about running the national water management “from flood to drought and from drought to flood”. -

POLAND 1939 Also by Roger Moorhouse
POLAND 1939 Also by Roger Moorhouse The Devils’ Alliance: Hitler’s Pact with Stalin, 1939–1941 (2014) Berlin at War (2012) POLAND 1939 THE OUTBREAK OF WORLD WAR II Roger Moorhouse New York Copyright © 2020 by Roger Moorhouse Cover design by TK Cover image TK Cover copyright © 2020 Hachette Book Group, Inc. Hachette Book Group supports the right to free expression and the value of copyright. The purpose of copyright is to encourage writers and artists to produce the creative works that enrich our culture. The scanning, uploading, and distribution of this book without permission is a theft of the author’s intellectual property. If you would like permission to use material from the book (other than for review purposes), please contact [email protected]. Thank you for your support of the author’s rights. Basic Books Hachette Book Group 1290 Avenue of the Americas, New York, NY 10104 www.basicbooks.com Printed in the United States of America Originally published in TK by Publisher TK in Country TK First U.S. Edition 2020 Published by Basic Books, an imprint of Perseus Books, LLC, a subsidiary of Hachette Book Group, Inc. The Basic Books name and logo is a trademark of the Hachette Book Group. The Hachette Speakers Bureau provides a wide range of authors for speaking events. To find out more, go to www.hachettespeakersbureau.com or call (866) 376-6591. The publisher is not responsible for websites (or their content) that are not owned by the publisher. Print book interior design by Linda Mark Library of Congress Cataloging-in-Publication Data Names: Moorhouse, Roger, author. -

Monitoring of the Otter Recolonisation of Poland
Hystrix It. J. Mamm (n.s.) 17 (1) (2006): 37-46 MONITORING OF THE OTTER RECOLONISATION OF POLAND JERZY ROMANOWSKI Centre for Ecological Research, Polish Academy of Sciences, ul. Konopnickiej 1, Dziekanów Lesny,/ 05-092 Lomianki,⁄ Poland Fax: +48227513100; E-mail: [email protected] ABSTRACT - The Standard Method was used for three field censuses of the otter Lutra lutra distribution in Poland. In the first national survey in 1991-1994 evidence of otters was found throughout the country, with 80% of positive sites on 2000 sites visited. Only two areas, Silesia in the south and Central Poland, had very few signs of otters. The following censuses in Central and Eastern Poland (1996-1998 and 2003) showed the otter expanded its range and recolonised much area of Central Poland, including about 700 km of rivers in the catchment of River Bzura. The number of positive 10x10 km UTM squares increased twice as compared to first survey (1991-1994). The rate of expansion was very high in com- parison to other studies in European countries. This could be due to the functional cohesion of network of rivers and lakelands in Poland. The expansion of otters was accompanied by change in habitat selection: preference for optimal habitats (unregulated rivers with tree and other vegetation cover) decreased while suboptimal and marginal habitats (e.g. channels, regulated rivers in towns) were occupied more frequently as compared to first survey. The negative side-effect of the expansion of the species is the increase of damages on fishponds, with consequent increase of pressure by fishpond owners to permit shooting of otters and/or to promote damage compensation. -

Belarus – Ukraine 2007 – 2013
BOOK OF PROJECTS CROSS-BORDER COOPERATION PROGRAMME POLAND – BELARUS – UKRAINE 2007 – 2013 BOOK OF PROJECTS CROSS-BORDER COOPERATION PROGRAMME POLAND – BELARUS – UKRAINE 2007 – 2013 ISBN 978-83-64233-73-9 BOOK OF PROJECTS CROSS-BORDER COOPERATION PROGRAMME POLAND – BELARUS – UKRAINE 2007 – 2013 WARSAW 2015 CROSS-BORDER COOPERATION PROGRAMME POLAND – BELARUS – UKRAINE 2007-2013 FOREWORD Dear Readers, Cross-border Cooperation Programme Poland-Belarus-Ukraine 2007-2013 enables the partners from both sides of the border to achieve their common goals and to share their experience and ideas. It brings different actors – inhabitants, institutions, organisations, enterprises and communities of the cross-border area closer to each other, in order to better exploit the opportunities of the joint development. In 2015 all the 117 projects co-financed by the Programme shall complete their activities. This publication will give you an insight into their main objectives, activities and results within the projects. It presents stories about cooperation in different fields, examples of how partner towns, villages or local institutions can grow and develop together. It proves that cross-border cooperation is a tremendous force stimulating the develop- ment of shared space and building ties over the borders. I wish all the partners involved in the projects persistence in reaching all their goals at the final stage of the Programme and I would like to congratulate them on successful endeavours in bringing tangible benefits to their communities. This publication will give you a positive picture of the border regions and I hope that it will inspire those who would like to join cross-border cooperation in the next programming period. -

Shelter from the Holocaust
Shelter from the Holocaust Shelter from the Holocaust Rethinking Jewish Survival in the Soviet Union Edited by Mark Edele, Sheila Fitzpatrick, and Atina Grossmann Wayne State University Press | Detroit © 2017 by Wayne State University Press, Detroit, Michigan 48201. All rights reserved. No part of this book may be reproduced without formal permission. Manufactured in the United States of Amer i ca. ISBN 978-0-8143-4440-8 (cloth) ISBN 978-0-8143-4267-1 (paper) ISBN 978-0-8143-4268-8 (ebook) Library of Congress Control Number: 2017953296 Wayne State University Press Leonard N. Simons Building 4809 Woodward Ave nue Detroit, Michigan 48201-1309 Visit us online at wsupress . wayne . edu Maps by Cartolab. Index by Gillespie & Cochrane Pty Ltd. Contents Maps vii Introduction: Shelter from the Holocaust: Rethinking Jewish Survival in the Soviet Union 1 mark edele, sheila fitzpatrick, john goldlust, and atina grossmann 1. A Dif er ent Silence: The Survival of More than 200,000 Polish Jews in the Soviet Union during World War II as a Case Study in Cultural Amnesia 29 john goldlust 2. Saved by Stalin? Trajectories and Numbers of Polish Jews in the Soviet Second World War 95 mark edele and wanda warlik 3. Annexation, Evacuation, and Antisemitism in the Soviet Union, 1939–1946 133 sheila fitzpatrick 4. Fraught Friendships: Soviet Jews and Polish Jews on the Soviet Home Front 161 natalie belsky 5. Jewish Refugees in Soviet Central Asia, Iran, and India: Lost Memories of Displacement, Trauma, and Rescue 185 atina grossmann v COntents 6. Identity Profusions: Bio- Historical Journeys from “Polish Jew” / “Jewish Pole” through “Soviet Citizen” to “Holocaust Survivor” 219 john goldlust 7. -

Download This Article in PDF Format
E3S Web of Conferences 30, 02005 (2018) https://doi.org/10.1051/e3sconf/20183002005 Water, Wastewater and Energy in Smart Cities Sewage Management Changes in the North- eastern Poland After Accession to the European Union Szymon Skarżyński1,*, and Izabela Bartkowska2 1,2Bialystok University of Technology, Faculty of Civil and Environmental Engineering, Department of Technology and Systems in Environmental Engineering, Wiejska 45A, 15-351 Bialystok, Poland Abstract. Poland's accession to the European Union contributed to the infrastructure development of the whole country. One of the elements of the modernized infrastructure is the sewage network and facilities on this network, as well as facilities for waste water treatment and disposal of sludge. A wide stream of funds flowing to the country, and consequently also to the north-eastern polish voivodeships (Podlaskie, Warmian- Masurian, Lublin), allowed modernization, organize, and sometimes to build a new sewage management of this part of the country. The main factors and parameters that allow us to evaluate the development of the sewage management in north-eastern Poland are included: percentage of population using sewage treatment plants, number of municipal sewage plants with the division of their type, number of industrial plants, number of septic tanks, amount of sewage purified in a year, amount of sludge produced in the year, design capacity of sewage treatment plant, size of plant in population equivalent (PE). From a number of investments in the field of wastewater management carried out in the discussed area in the period after Poland's accession to the European Union, 9 investments were considered the most important, 3 from each of the voivodeships.