Final Design Report for Human Powered Vehicle Drivetrain Project
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

RC Baja: Drivetrain Nick Paulay [email protected]
Central Washington University ScholarWorks@CWU All Undergraduate Projects Undergraduate Student Projects Winter 2019 RC Baja: DriveTrain Nick Paulay [email protected] Follow this and additional works at: https://digitalcommons.cwu.edu/undergradproj Part of the Mechanical Engineering Commons Recommended Citation Paulay, Nick, "RC Baja: DriveTrain" (2019). All Undergraduate Projects. 79. https://digitalcommons.cwu.edu/undergradproj/79 This Undergraduate Project is brought to you for free and open access by the Undergraduate Student Projects at ScholarWorks@CWU. It has been accepted for inclusion in All Undergraduate Projects by an authorized administrator of ScholarWorks@CWU. For more information, please contact [email protected]. Central Washington University MET Senior Capstone Projects RC Baja: Drivetrain By Nick Paulay (Partner: Hunter Jacobson-RC Baja Suspension & Steering) 1 Table of Contents Introduction Description Motivation Function Statement Requirements Engineering Merit Scope of Effort Success Criteria Design and Analyses Approach: Proposed Solution Design Description Benchmark Performance Predictions Description of Analyses Scope of Testing and Evaluation Analyses Tolerances, Kinematics, Ergonomics, etc. Technical Risk Analysis Methods and Construction Construction Description Drawing Tree Parts list Manufacturing issues Testing Methods Introduction Method/Approach/Procedure description Deliverables Budget/Schedule/Project Management Proposed Budget Proposed Schedule Project Management Discussion Conclusion Acknowledgements References Appendix A – Analyses Appendix B – Drawings Appendix C – Parts List Appendix D – Budget Appendix E – Schedule Appendix F - Expertise and Resources 2 Appendix G –Testing Data Appendix H – Evaluation Sheet Appendix I – Testing Report Appendix J – Resume 3 Abstract The American Society of Mechanical Engineers (ASME) annually hosts an RC Baja challenge, testing a RC car in three events: slalom, acceleration and Baja. -

Electric Vehicle Conversion: Optimisation of Parameters in the Design Process
M. Gordić i dr. Prepravak u električno vozilo: optimizacija parametara u procesu konstruiranja ISSN 1330-3651 (Print), ISSN 1848-6339 (Online) https://doi.org/10.17559/TV-20160613131757 ELECTRIC VEHICLE CONVERSION: OPTIMISATION OF PARAMETERS IN THE DESIGN PROCESS Mirko Gordić, Dragan Stamenković, Vladimir Popović, Slavko Muždeka, Aleksandar Mićović Preliminary communication One of the directions for making cleaner and more economic vehicles is to adopt electric vehicle concept. The paper shows current design concepts for electric vehicles worldwide, as well as current sources for supplying vehicles with electric energy. It describes a conversion of one vehicle so that it can be powered by electric motor. The results of tractive and dynamic characteristics calculation and vehicle stability simulation, before and after the conversion, are shown. Obtained results and influential factors are analysed so they can be optimised in order to influence the final characteristics of the converted vehicle. The conclusion is that the complete optimisation process should be performed before the beginning of vehicle conversion in order to avoid undesirable effects, i.e. undesirable characteristics of converted vehicle and high conversion costs. Keywords: conversion; electric vehicle; vehicle dynamics Prepravak u električno vozilo: optimizacija parametara u procesu konstruiranja Prethodno priopćenje Jedan od pravaca ka stvaranju čistijih i ekonomičnijih vozila jeste prihvatanje koncepta električnog vozila. Rad predstavlja suvremene koncepte konstrukcije električnih vozila širom svijeta, kao i načine snabdjevanja vozila energijom. Opisan je prepravak vozila kako bi ga se moglo pogoniti elektro- motorom. Prikazani su rezultati vučno-dinamičkog proračuna i simulacije stabilnosti prije i poslije prepravka. Analizirani su dobiveni rezultati i utjecajni čimbenici radi optimiziranja u cilju utjecaja na karakteristike prepravljenog vozila. -

Catalog Who We Are
20 20CATALOG WHO WE ARE Ultracycle bicycle parts and ULTRACYCLE U-LOCK accessories represent the best • User friendly lock is drill, pick and cut resistant • Quick release multi-position mounting bracket value, quality, and selection for • Thick 13 mm hardened steel shackle every type of bike and rider. • Non-damaging rubber coated finish 08-079-4200 08-079-4500 08-079-4700 1420 1450 1470 Part # Model Type Size Number Each P5 08-079-4200 Mini Key 3.5 x 5.5’’ 1420 13.73 12.79 08-079-4500 Standard Key 4.25 x 8’’ 1450 14.63 13.70 08-079-4700 Long Key 4.25 x 11’’ 1470 17.16 15.99 ULTRACYCLE COMBO U-LOCK • User friendly lock is drill, pick and cut resistant • Resettable combination lock - choose your code • Quick release multi-position mounting bracket • Thick 13 mm hardened steel shackle • Non-damaging rubber coated finish 08-079-4800 1455 Part # Model Type Size Number Each P5 08-079-4800 Standard Combo 4.25’’ x 8’’ 1455 16.11 15.00 ULTRACYCLE MINI SLIM U-LOCK • Stylish user friendly lock • Drill, pick and cut resistant 08-079-5000 1500 • Hardened steel shackle • Non-damaging rubber coated finish Part # Model Type Size Number Each P5 08-079-5000 Mini Slim Key 3.5 x 5’’ 1500 13.42 12.50 08-079-5010 Mini LS Slim Key 3.5 x 6.5’’ 1510 13.42 12.50 2 Order On-Line at khsdealers.com L OCKS & SeCURITY ULTRACYCLE ULTRACYCLE U-LOCK & CABLE SEAT LEASH • User friendly lock is drill, pick and cut resistant • 6 mm plastic coated cable • Quick release multi-position mounting bracket • Double loop end • Thick 13 mm hardened steel shackle • Non-damaging rubber -

Flexible Wheel Chair
GRD Journals- Global Research and Development Journal for Engineering | Volume 1 | Issue 8 | July 2016 ISSN: 2455-5703 Flexible Wheel Chair Mahantesh Tanodi Department of Mechanical Engineering Hirasugar Institute of Technology, Nidasoshi, Karnataka (India) Sujata Huddar S. B. Yapalaparvi Department of Electrical and Electronics Engineering Department of Mechanical Engineering Hirasugar Institute of Technology, Nidasoshi, Karnataka Hirasugar Institute of Technology, Nidasoshi, Karnataka (India) (India) Abstract The wheelchair is one of the most commonly used assistive devices for enhancing personal mobility, which is a precondition for enjoying human rights and living in dignity and assists people with disabilities to become more productive members of their communities. For many people, an appropriate, well-designed and well-fitted wheelchair can be the first step towards inclusion and participation in society. When the need is not met, people with disabilities are isolated and do not have access to the same opportunities as others within their own communities. Providing wheelchairs that are fit for the purpose not only enhances mobility but begins a process of opening up a world of education, work and social life [1]. The development of national policies and increased training opportunities in the design, production and supply of wheelchairs are essential next steps. Every human being need to move from one place another to fulfill his requirements and to accomplish that requirements he will travel from one place to another place by walking which is a basic medium of transportation. But it is exceptional in case of physically disables (Persons don’t have both legs). In order to support and help such a person’s we designed a special manually lever operated wheel chair. -

Actuators the Following Products Suit Many Applications That Include Linear Positioning, Robotic Applications, Pick and Place Mechanisms, and XYZ Axis Gantry Systems
Robotic & Linear Positioning Actuators The following products suit many applications that include linear positioning, robotic applications, pick and place mechanisms, and XYZ axis gantry systems. • High Strength Belt or Ballscrew Driven Linear Actuators • Belt Driven Linear Actuator • Ballscrew Driven Linear Actuator • Built-in Linear Ball Rail Guide System • High Precision Reinforced Polyurethane Belt Drive • Ballscrew and Leadscrew Driven Actuators • Options that include built-in low backlash planetary gear reducers, belt reduction drive systems, and custom built adapters. • Accessories High Strength Belt or Ballscrew Driven Linear Actuators Features • Linear velocities over 3M/sec • Heavy duty anodized aluminum extrusion • Low friction bearing guide system • Clamps for rigid mounting of actuators • Optional belt reduction drives • Optional linear scale feedback for high positional accuracy Built-in single point lubrication for guide system • Lengths to 12 meters • Optional built-in low backlash planetary gear reducer • Mechanical and proximity switch ready • Adapter plates available for easy machine assembly • Assembled to the customer’s requirements • Complete systems are available. Belt Driven Linear Actuator Features • High thrust capacities • Belt acts as cover • Highly repeatable positioning • Ideal for high speed applications Ballscrew Driven Linear Actuator Features • Precision rolled ballscrews • Optional ground ballscrews or leadscrews • Bellows cover to protect screw and guide system • High accuracy applications • High thrust -

Owner's Manual
IBD-Mountain EN 07-01-19 m0520 © Batch Bicycles Ltd 2019 PLEASE VISIT YOUR AUTHORIZED BATCH RETAILER FOR SERVICE AND QUESTIONS. Batch Bicycles 8889 Gander Creek Dr. Dayton, OH 45342 833.789.8899 batchbicycles.com OWNER’S MANUAL for Mountain Bikes BATCH Limited Warranty We’ve Got You Covered damage, failure, or loss that is caused by improper Owner’s Manual Index Batch Bicycles comes with our industry’s best war- assembly, maintenance, adjustment, storage, or ranty program – Batch Bicycles Service Program. use of the product. This limited warranty does not Safety and Warnings ...........................................................................................2-5 Once your Batch Bicycle is registered, Batch extend to future performance. Bicycles provides each original retail purchaser of a Batch Bicycle a warranty against defects in materi- This Limited Warranty will be void if the prod- Assembly and Parts ..............................................................................................6-18 als and workmanship, as stated below: uct is ever: • Used in any competitive sport Brake System .............................................................................................................. 19-22 General: • Used for stunt riding, jumping, aerobatics or Warranty Part or model specifi cations are subject to change similar activity without notice. • Modifi ed in any way Shift System .................................................................................................................. 23-29 This Limited Warranty -
Adjustments and Settings Electronic Groupsets
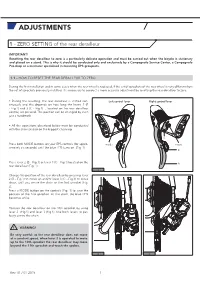
ADJUSTMENTS 1 - ZERO SETTING of the rear derailleur IMPORTANT! Resetting the rear derailleur to zero is a particularly delicate operation and must be carried out when the bicycle is stationary and placed on a stand. This is why it should be conducted only and exclusively by a Campagnolo Service Center, a Campagnolo Pro-shop or a mechanic specialised in mounting EPS groupsets. 1.1 - HOW TO RESET THE REAR DERAILLEUR TO ZERO During the first installation and in some cases when the rear wheel is replaced, if the set of sprockets of the new wheel is very different from the set of sprockets previously installed, it is necessary to conduct a more accurate adjustment by resetting the rear derailleur to zero. • During the resetting, the rear derailleur is shifted con- Left control lever Right control lever tinuously and this depends on how long the levers 2 (B - Fig.1) and 3 (C - Fig.1) , located on the rear derailleur control, are pressed. The position can be changed by even just a hundredth. • All the operations described below must be conducted with the chain placed on the biggest chainring. C Press both MODE buttons on your EPS controls (for appro- mode mode ximately six seconds) until the blue LED turns on (Fig. 1). B Press lever 2 (B - Fig.1) or lever 3 (C - Fig.1) located on the A rear derailleur (Fig. 1). 1 Change the position of the rear derailleur by pressing lever 2 (B - Fig.1) to move up and/or lever 3 (C - Fig.1) to move down, until you centre the chain on the 2nd sprocket (Fig. -
Friction-Producing Mechanisms of a Bicycle Chain
Friction-Producing Mechanisms of a Bicycle Chain _ Effectiveness of Chain Lubricants for Reducing Frictional Losses Copyright ©2014 Friction Facts, LLC rev 5-13-14 Overview The friction-producing mechanisms of a bicycle chain moving through a derailleur-style drivetrain are unique and relatively complex. These friction- producing mechanisms arise from friction created in individual links, which are subjected to multiple regions of both high and low pressure, reciprocating sliding forces, and stiction. As such, testing methods for chain efficiency and chain lubricants must address these complex mechanisms. This paper explores the details of how friction is created in a bicycle chain in a modern-derailleur style drivetrain, the role of chain lubricants to minimize friction in a chain, and the limitations of commonly-used friction test methods. This paper also suggests a testing process to analyze the efficiency of a chain and lubricant in a manner specifically relevant to chain friction-producing mechanisms. Friction-Producing Mechanisms of a Chain From a simplified standpoint, the friction created (wasted energy) by a roller chain is generally proportional to: [chain tension] x [sine of lateral deflection] x [link articulation angle at a given engagement or disengagement point] x [number of link articulations per unit time at that point] x [total engagement and disengagement points in the complete drivetrain]. This basic formula has been demonstrated by multiple drivetrain studies and, more recently, by tests performed by Friction Facts. Essentially, friction is created each time an individual link, under a finite level of tension, bends (articulates) as it engages or disengages the teeth of a cog, pulley, or chainring. -

BMW BIKES. Update 2021 DESIGN PHILOSOPHY
BMW BIKES. Update 2021 DESIGN PHILOSOPHY. Special themes of the collection: BMW collaboration with 3T. The collaboration with the Italian brand 3T sets standards. The gravel bike stands out thanks to its precise, minimalist design and state-of-the-art racing components. Clear lines and contours as well as the modern colouring make this bike unique. The BMW M Bike. The material mix of aluminium and carbon analogous to the BMW M vehicles gives this bike its sportiness. Due to the carbon fork specially developed for the bike, the weight of the bike could be reduced by a kilogram. The BMW E-Bikes. Stylish, clear form meets high tech: The BMW Active Hybrid E-Bike and the BMW Urban Hybrid E-Bike feature powerful drive units that blend seamlessly into the slim frame. Both E-Bikes are equipped with an innovative LED battery-charge indicator. DESIGN AND FUNCTION. What we know from BMW vehicles can also be found in BMW Bikes. The BMW Cruise Bikes. They enthuse riders not only with pure driving pleasure, but also with The unmistakable design inspired by the first-class design and innovative functionalities. the fixie trend and the high-quality The modern colour scheme, the linear frame shape with discreet components of the BMW Cruise Bike create BMW branding give the BMW Bikes an unmistakable urban look. The the unique BMW experience even when collaboration with 3T perfects the combination of unique design and biking. innovative components. PRODUCT INFORMATION BMW LIFESTYLE COLLECTIONS 2021. 3 BMW BIKES. 3T FOR BMW GRAVELBIKE The Gravelbike as an exclusive edition for BMW, created in collaboration with the traditional Italian company 3T. -

Gear Up! Reviews: Ortlieb Vario & Carradice Backpack Panniers
WS E VI E R Bikes • Accessories • Kit Submit a review If you want to submit a review, write or email the editor – details on page 88 – Gear up! for advice on how to go about it. Each one printed wins a boxed set of three A cross-section of cycling products selected Cassini historical maps of the area of your choice. To see the whole range, and reviewed by CTC staff, specialist visit www.cassinimaps.com. To order by journalists and CTC members phone, call 0845 458 9910. BACKPACK PANNIERS £50 & £110 Reviewed by Technical Editor Chris Juden The Ortlieb Vario (near right) and Carradice Carradry Rucksack Pannier (far right) are the latest answers to a need that’s as old as the bicycle pannier. We all know that wheels make things easier to move, but normal panniers are awkward things to carry off the bike, which is one reason so many people pedal under the burden of a rucksack these days. That may be bearable for small amounts of luggage or distance, but not if you have lots to carry and it's more than a couple of miles to work or the shops. As for holidays: of course you’ll not want anything to detract from the pleasure of cycling – but if you also want to do a bit of serious hiking, on your back the load must go! Local errands and the bike-hike mix have similar but not two external sleeves (e.g. for bike bottles) and an internal identical demands, which play to the different strengths document pocket. -

Bike Tune Up
Bike Tune Up March 14, 2007 Contents What You Will Need For Tuning Your Bicycle: . 3 What if you get in over your head? . 3 Step 1: Adjust Headset . 4 Step 2: Bottom Bracket Adjustment . 6 Pedals . 7 Step 3: Adjust The Front Wheel Bike Hub . 9 Step 4: Adjust Rear Wheel Hubs . 11 Coaster Brake . 11 Three-Speed Wheels . 11 Derailleur-Equipped and BMX Bicycle Wheels . 11 Overhauling . 12 Freewheels - Overhaul, General Care and Troubleshooting . 12 Step 5: Wheel Truing . 14 Unbending A Bicycle Bent Wheel . 15 Flat Spots . 16 Kinks . 17 Broken Spokes . 17 Step 6: Bike Brake Adjustment . 19 If It Is A Sidepull Or Centerpull Brake: . 21 If It Is A Cantilever Bike Brake: . 21 Replacing A Cable . 22 The Brake Pads . 25 Diagnosing Brake Stickiness . 25 Hand Levers . 25 Step 7: Adjust The Rear Derailleur . 27 Replacing a Cable . 29 Step 8: Adjust The Front Derailleur . 31 Replacing a Cable . 33 Step 9: Finish The Tune-Up . 34 1 2 What You Will Need For Tuning Your Bicycle: • This Presentation • An adjustable wrench or set of wrenches • Tongue and groove pliers, sometimes called ”channellocks” • Bicycle bearing cone wrenches (approx. $8 at bike stores) Figure 1: cone wrench • Oil, grease, and non-flammable, non-toxic cleaning solvent • A couple of screwdrivers • A freewheel remover (maybe) Figure 2: Freewheel Remover • Patience - This is the most important ingredient What if you get in over your head? Ask a friend, or call the mechanic at the local bike shop for advice. In the worst case, you would have to take the bike into the shop and pay for professional help, which would still cost less than a complete tune-up anyway. -

CONNECTING to NEW ADVENTURES Systems Ebike Bosch FEEL the FLOW |
Products 2021 Products 2021 CONNECTING TO NEW ADVENTURES Bosch eBike Systems FEEL THE FLOW | Bosch eBike Systems | EN EN bosch-ebike.com Product innovations 2021 For even more flow NEW The eBike is more than just another mode of transportation. There's a new approach to living and mobility that offers you ease and enjoyment in physical activity, allowing you stay fit in complete relaxation. eBiken epowered by Bosch means: new products and functions for an even smarter connection to the digital world, next level eMountain biking, greater safety and efficient mobility in the city. #FeelTheFlow Nyon The new Nyon paves the way for a fully connected eBike experience: The on-board computer with the 3.2-inch high-resolution colour display has a touchscreen for intuitive operation and is connected with the digital world via the eBike Connect smartphone app and the ebike-connect.com online portal. More torque Increased performance for Cargo, Cargo Speed, Performance Speed and Performance CX Drive Units: The drives will provide support with a maximum torque of up to 85 Nm from model year 2021 onwards. Help Connect The COBI.Bike smartphone app and the new Help Connect premium function give eBikers an alert, digital companion that can be relied upon to provide fast assistance if it detects that the rider may have had an accident. Kiox The new navigation function of the Kiox on-board computer supports sporty riders as they explore unfamiliar areas. Kiox uses the eBike Connect smartphone app to offer eBikers access to the digital world. Performance Line CX From model year 2021 onwards, the Performance Line CX will offer even more fun on the trail: With a maximum torque of 85 Nm, further development of eMTB mode and the new Extended Boost, the riding experience feels more natural, more intuitive and even more powerful.