Wind Influence on the Formation of Nearshore Currents in the Southern
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Coastal Circulation and Water-Column Properties in The
Coastal Circulation and Water-Column Properties in the War in the Pacific National Historical Park, Guam— Measurements and Modeling of Waves, Currents, Temperature, Salinity, and Turbidity, April–August 2012 Open-File Report 2014–1130 U.S. Department of the Interior U.S. Geological Survey FRONT COVER: Left: Photograph showing the impact of intentionally set wildfires on the land surface of War in the Pacific National Historical Park. Right: Underwater photograph of some of the healthy coral reefs in War in the Pacific National Historical Park. Coastal Circulation and Water-Column Properties in the War in the Pacific National Historical Park, Guam— Measurements and Modeling of Waves, Currents, Temperature, Salinity, and Turbidity, April–August 2012 By Curt D. Storlazzi, Olivia M. Cheriton, Jamie M.R. Lescinski, and Joshua B. Logan Open-File Report 2014–1130 U.S. Department of the Interior U.S. Geological Survey U.S. Department of the Interior SALLY JEWELL, Secretary U.S. Geological Survey Suzette M. Kimball, Acting Director U.S. Geological Survey, Reston, Virginia: 2014 For product and ordering information: World Wide Web: http://www.usgs.gov/pubprod Telephone: 1-888-ASK-USGS For more information on the USGS—the Federal source for science about the Earth, its natural and living resources, natural hazards, and the environment: World Wide Web: http://www.usgs.gov Telephone: 1-888-ASK-USGS Any use of trade, product, or firm names is for descriptive purposes only and does not imply endorsement by the U.S. Government. Suggested citation: Storlazzi, C.D., Cheriton, O.M., Lescinski, J.M.R., and Logan, J.B., 2014, Coastal circulation and water-column properties in the War in the Pacific National Historical Park, Guam—Measurements and modeling of waves, currents, temperature, salinity, and turbidity, April–August 2012: U.S. -

Chapter 14. Northern Shelf Region
Chapter 14. Northern Shelf Region Queen Charlotte Sound, Hecate Strait, and Dixon canoes were almost as long as the ships of the early Spanish, Entrance form a continuous coastal seaway over the conti- and British explorers. The Haida also were gifted carvers nental shelfofthe Canadian west coast (Fig. 14.1). Except and produced a volume of art work which, like that of the for the broad lowlands along the northwest side ofHecate mainland tribes of the Kwaluutl and Tsimshian, is only Strait, the region is typified by a highly broken shoreline now becoming appreciated by the general public. of islands, isolated shoals, and countless embayments The first Europeans to sail the west coast of British which, during the last ice age, were covered by glaciers Columbia were Spaniards. Under the command of Juan that spread seaward from the mountainous terrain of the Perez they reached the vicinity of the Queen Charlotte mainland coast and the Queen Charlotte Islands. The Islands in 1774 before returning to a landfall at Nootka irregular countenance of the seaway is mirrored by its Sound on Vancouver Island. Quadra followed in 1775, bathymetry as re-entrant troughs cut landward between but it was not until after Cook’s voyage of 1778 with the shallow banks and broad shoals and extend into Hecate Resolution and Discovery that the white man, or “Yets- Strait from northern Graham Island. From an haida” (iron men) as the Haida called them, began to oceanographic point of view it is a hybrid region, similar explore in earnest the northern coastal waters. During his in many respects to the offshore waters but considerably sojourn at Nootka that year Cook had received a number modified by estuarine processes characteristic of the of soft, luxuriant sea otter furs which, after his death in protected inland coastal waters. -

Hydrothermal Vent Fields and Chemosynthetic Biota on the World's
ARTICLE Received 13 Jul 2011 | Accepted 7 Dec 2011 | Published 10 Jan 2012 DOI: 10.1038/ncomms1636 Hydrothermal vent fields and chemosynthetic biota on the world’s deepest seafloor spreading centre Douglas P. Connelly1,*, Jonathan T. Copley2,*, Bramley J. Murton1, Kate Stansfield2, Paul A. Tyler2, Christopher R. German3, Cindy L. Van Dover4, Diva Amon2, Maaten Furlong1, Nancy Grindlay5, Nicholas Hayman6, Veit Hühnerbach1, Maria Judge7, Tim Le Bas1, Stephen McPhail1, Alexandra Meier2, Ko-ichi Nakamura8, Verity Nye2, Miles Pebody1, Rolf B. Pedersen9, Sophie Plouviez4, Carla Sands1, Roger C. Searle10, Peter Stevenson1, Sarah Taws2 & Sally Wilcox11 The Mid-Cayman spreading centre is an ultraslow-spreading ridge in the Caribbean Sea. Its extreme depth and geographic isolation from other mid-ocean ridges offer insights into the effects of pressure on hydrothermal venting, and the biogeography of vent fauna. Here we report the discovery of two hydrothermal vent fields on theM id-Cayman spreading centre. The Von Damm Vent Field is located on the upper slopes of an oceanic core complex at a depth of 2,300 m. High-temperature venting in this off-axis setting suggests that the global incidence of vent fields may be underestimated. At a depth of 4,960 m on the Mid-Cayman spreading centre axis, the Beebe Vent Field emits copper-enriched fluids and a buoyant plume that rises 1,100 m, consistent with > 400 °C venting from the world’s deepest known hydrothermal system. At both sites, a new morphospecies of alvinocaridid shrimp dominates faunal assemblages, which exhibit similarities to those of Mid-Atlantic vents. 1 National Oceanography Centre, Southampton, UK. -
Part 3. Oceanic Carbon and Nutrient Cycling
OCN 401 Biogeochemical Systems (11.03.11) (Schlesinger: Chapter 9) Part 3. Oceanic Carbon and Nutrient Cycling Lecture Outline 1. Models of Carbon in the Ocean 2. Nutrient Cycling in the Ocean Atmospheric-Ocean CO2 Exchange • CO2 dissolves in seawater as a function of [CO2] in the overlying atmosphere (PCO2), according to Henry’s Law: [CO2]aq = k*PCO2 (2.7) where k = the solubility constant • CO2 dissolution rate increases with: - increasing wind speed and turbulence - decreasing temperature - increasing pressure • CO2 enters the deep ocean with downward flux of cold water at polar latitudes - water upwelling today formed 300-500 years ago, when atmospheric [CO2] was 280 ppm, versus 360 ppm today • Although in theory ocean surface waters should be in equilibrium with atmospheric CO2, in practice large areas are undersaturated due to photosythetic C-removal: CO2 + H2O --> CH2O + O2 The Biological Pump • Sinking photosynthetic material, POM, remove C from the surface ocean • CO2 stripped from surface waters is replaced by dissolution of new CO2 from the atmosphere • This is known as the Biological Pump, the removal of inorganic carbon (CO2) from surface waters to organic carbon in deep waters - very little is buried with sediments (<<1% in the pelagic ocean) -most CO2 will ultimately be re-released to the atmosphere in zones of upwelling - in the absence of the biological pump, atmospheric CO2 would be much higher - a more active biological pump is one explanation for lower atmospheric CO2 during the last glacial epoch The Role of DOC and -

Biological Oceanography - Legendre, Louis and Rassoulzadegan, Fereidoun
OCEANOGRAPHY – Vol.II - Biological Oceanography - Legendre, Louis and Rassoulzadegan, Fereidoun BIOLOGICAL OCEANOGRAPHY Legendre, Louis and Rassoulzadegan, Fereidoun Laboratoire d'Océanographie de Villefranche, France. Keywords: Algae, allochthonous nutrient, aphotic zone, autochthonous nutrient, Auxotrophs, bacteria, bacterioplankton, benthos, carbon dioxide, carnivory, chelator, chemoautotrophs, ciliates, coastal eutrophication, coccolithophores, convection, crustaceans, cyanobacteria, detritus, diatoms, dinoflagellates, disphotic zone, dissolved organic carbon (DOC), dissolved organic matter (DOM), ecosystem, eukaryotes, euphotic zone, eutrophic, excretion, exoenzymes, exudation, fecal pellet, femtoplankton, fish, fish lavae, flagellates, food web, foraminifers, fungi, harmful algal blooms (HABs), herbivorous food web, herbivory, heterotrophs, holoplankton, ichthyoplankton, irradiance, labile, large planktonic microphages, lysis, macroplankton, marine snow, megaplankton, meroplankton, mesoplankton, metazoan, metazooplankton, microbial food web, microbial loop, microheterotrophs, microplankton, mixotrophs, mollusks, multivorous food web, mutualism, mycoplankton, nanoplankton, nekton, net community production (NCP), neuston, new production, nutrient limitation, nutrient (macro-, micro-, inorganic, organic), oligotrophic, omnivory, osmotrophs, particulate organic carbon (POC), particulate organic matter (POM), pelagic, phagocytosis, phagotrophs, photoautotorphs, photosynthesis, phytoplankton, phytoplankton bloom, picoplankton, plankton, -

The Response of the Upper Ocean to Solar Heating II
Quart. J. R. Met. Soc. (1986). 112, pp. 29-42 55 1.465.553:ss 1.365.7 1 The response of the upper ocean to solar heating. 11: The wind-driven current By J. D. WOODS and V. STRASS 1n.Ytitrtt ,fuer Meereskunde an der Unioer,rituet Kiel, F. R. G. (Received 28 February lYX?: revised 30 July 1985) SUMMARY The current profile generated by a steady wind stress is disturbed by the diurnal variation of mixed layer depth forced by solar heating. Momentum diffused deep at night is abandoned to rotate incrtially during the day when the mixed layer is shallow and then re-entrained next night when it deepens. The resulting variation of current profile has been calculated with a one-dimcnsional model in which power supply to turhulencc determines the profile of eddy viscosity. The resulting variations of current velocity at fixed depths are so complicated that it is not surprising that current meter nieasurenients have seldom yielded the classical Ekmaii solution. However, the progressive vector diagrams do exhibit an Ekman-like response (albeit with superimposed inertial disturbances) suggesting that the model might be tested by tracking drifters designed to follow the flow at fixed depths. The inertial rotation of the current in the diurnal thermocline leads to a diurnal jet. the dynamical equivalent of the nocturnal jet in the atmospheric boundary layer over land. The role of inertial currents in deepening the mixed layer is clarified, leading to proposals for improving the turbulence parametrizations used in models of the upper ocean. The model predicts that the diurnal thermocline contains two layers of persistent vigorous turbulence separated by a thicker band of patchy turbulence in otherwise laminar flow. -

Interactive Comment on “Impacts of UV Radiation on Plankton Community Metabolism Along the Humboldt Current System” by N
Biogeosciences Discuss., 8, C2596–C2611, 2011 Biogeosciences www.biogeosciences-discuss.net/8/C2596/2011/ Discussions © Author(s) 2011. This work is distributed under the Creative Commons Attribute 3.0 License. Interactive comment on “Impacts of UV radiation on plankton community metabolism along the Humboldt Current System” by N. Godoy et al. Anonymous Referee #3 Received and published: 23 August 2011 Review Impacts of UV radiation on plankton community metabolism along the Hum- boldt Current System by N. Godoy, A. Canepa, S. Lasternas, E. Mayol, S. RuÄsz-´ Halpern, S. AgustÄs,´ J. C. Castilla, and C. M. Duarte. Biogeosciences Discuss., 8, 5827–5848, 2011 General Comment This article reports experimental estimates of community metabolism assessed at 8 stations in the eastern south Pacific conducted during the Humboldt-2009 cruise on board RV Hesperides from 5 to 15 March 2009. An experimental evaluation of the ef- fect of UVB radiation on community metabolism is conducted. From few experiments the authors claim that UVB radiation suppressed net community production, result- ing in a dominance of heterotrophic communities in surface waters, compared to the C2596 prevalence of autotrophic communities inferred when materials, excluding UVB radia- tion, are used for incubation. They also claim that their results show that UVB radiation, which has increased greatly in the study area, may have suppressed net community production of the plankton communities, possibly driving plankton communities in the Southwest Pacific towards CO2 sources. The evidence provided in the manuscript is not sufficient to support the conclusions. The sampling is clearly too limited, both spatially and temporally, to extrapolate their results to the Humboldt Current System. -

Turbulent Flow Structure in Experimental Laboratory Wind
Coastal Engineering 64 (2012) 1–15 Contents lists available at SciVerse ScienceDirect Coastal Engineering journal homepage: www.elsevier.com/locate/coastaleng Turbulent flow structure in experimental laboratory wind-generated gravity waves Sandro Longo a,⁎, Dongfang Liang b, Luca Chiapponi a, Laura Aguilera Jiménez c a Department of Civil Engineering, University of Parma, Parco Area delle Scienze, 181/A, 43100 Parma, Italy b Department of Engineering, Trumpington Street, Cambridge CB2 1PZ, UK c Instituto Interuniversitario de Investigación del Sistema Tierra, Universidad de Granada, Avda. del Mediterráneo s/n, 18006 Granada, Spain article info abstract Article history: This paper is the third part of a report on systematic measurements and analyses of wind-generated water Received 1 December 2011 waves in a laboratory environment. The results of the measurements of the turbulent flow on the water Received in revised form 7 February 2012 side are presented here, the details of which include the turbulence structure, the correlation functions, Accepted 8 February 2012 and the length and velocity scales. It shows that the mean turbulent velocity profiles are logarithmic, and Available online xxxx the flows are hydraulically rough. The friction velocity in the water boundary layer is an order of magnitude smaller than that in the wind boundary layer. The level of turbulence is enhanced immediately beneath the Keywords: fl 2 Free surface turbulence water surface due to micro-breaking, which re ects that the Reynolds shear stress is of the order u*w. The ver- Wind-generated waves tical velocities of the turbulence are related to the relevant velocity scale at the still-water level. -

Recent Developments of Exploration and Detection of Shallow-Water Hydrothermal Systems
sustainability Article Recent Developments of Exploration and Detection of Shallow-Water Hydrothermal Systems Zhujun Zhang 1, Wei Fan 1, Weicheng Bao 1, Chen-Tung A Chen 2, Shuo Liu 1,3 and Yong Cai 3,* 1 Ocean College, Zhejiang University, Zhoushan 316000, China; [email protected] (Z.Z.); [email protected] (W.F.); [email protected] (W.B.); [email protected] (S.L.) 2 Institute of Marine Geology and Chemistry, National Sun Yat-Sen University, Kaohsiung 804, Taiwan; [email protected] 3 Ocean Research Center of Zhoushan, Zhejiang University, Zhoushan 316000, China * Correspondence: [email protected] Received: 21 August 2020; Accepted: 29 October 2020; Published: 2 November 2020 Abstract: A hydrothermal vent system is one of the most unique marine environments on Earth. The cycling hydrothermal fluid hosts favorable conditions for unique life forms and novel mineralization mechanisms, which have attracted the interests of researchers in fields of biological, chemical and geological studies. Shallow-water hydrothermal vents located in coastal areas are suitable for hydrothermal studies due to their close relationship with human activities. This paper presents a summary of the developments in exploration and detection methods for shallow-water hydrothermal systems. Mapping and measuring approaches of vents, together with newly developed equipment, including sensors, measuring systems and water samplers, are included. These techniques provide scientists with improved accuracy, efficiency or even extended data types while studying shallow-water hydrothermal systems. Further development of these techniques may provide new potential for hydrothermal studies and relevant studies in fields of geology, origins of life and astrobiology. -

Upper Ocean Hydrology of the Northern Humboldt Current System
Progress in Oceanography 165 (2018) 123–144 Contents lists available at ScienceDirect Progress in Oceanography journal homepage: www.elsevier.com/locate/pocean Upper ocean hydrology of the Northern Humboldt Current System at T seasonal, interannual and interdecadal scales ⁎ Carmen Gradosa, , Alexis Chaigneaub, Vincent Echevinc, Noel Domingueza a Instituto del MAR de PErú (IMARPE), Callao, Peru b Laboratoire d'Études en Géophysique et Océanographie Spatiale (LEGOS), Université de Toulouse, CNES, CNRS, IRD, UPS, Toulouse, France c Laboratoire d'Océanographie et de Climatologie: Expérimentation et Analyse Numérique (LOCEAN), LOCEAN-IPSL, IRD/CNRS/Sorbonnes Universités (UPMC)/MNHN, UMR 7159, Paris, France ARTICLE INFO ABSTRACT Keywords: Since the 1960s, the Instituto del Mar del Perú (IMARPE) collected tens of thousands of in-situ temperature and North Humboldt Current System salinity profiles in the Northern Humboldt Current System (NHCS). In this study, we blend this unique database Hydrology with the historical in-situ profiles available from the World Ocean Database for the period 1960–2014 and apply Water masses a four-dimensional interpolation scheme to construct a seasonal climatology of temperature and salinity of the Seasonal variations NHCS. The resulting interpolated temperature and salinity fields are gridded at a high spatial resolution Geostrophic currents (0.1° × 0.1° in latitude/longitude) between the surface and 1000 m depth, providing a detailed view of the ENSO Interdecadal variability hydrology and geostrophic circulation of this region. In particular, the mean distribution and characteristics of the main water-masses in the upper ocean of the NHCS are described, as well as their seasonal variations be- tween austral summer and winter. -
Primary Production and Community Respiration in the Humboldt Current System Off Chile and Associated Oceanic Areas
MARINE ECOLOGY PROGRESS SERIES Published May 12 Mar Ecol bog Ser Primary production and community respiration in the Humboldt Current System off Chile and associated oceanic areas Giovanni Daneril-: Victor Dellarossa2, Renato ~uinones~,Barbara Jacob', Paulina ~ontero',Osvaldo Ulloa4 '~entrode Ciencias y Ecologia Aplicada (CEA), Universidad del Mar. Campus Valparaiso, Carmen 446, Placeres, Valparaiso. Chile 'Departamento de Boanica, 3~epartamentode OceanograKa and 'Programs Regional de Oceanografia Fisica y Clima. Universidad de Concepcion, Casilla 2407, Concepcion, Chile ABSTRACT: The hlgh biological productivity of the Hurnboldt Current System (HCS) off Chile sup- ports an annual fish catch of over 7 mill~ont. The area is also important biogeochemically, because the outgassing of recently upwelled water is modulated by contrasting degrees of biolopcal activity. How- ever, very few field measurements of primary production and planktonic respiration have been under- taken within the Eastern Boundary Current (EBC)system off Chile. In this study an estimate of primary production (PP) and surface planktonic commun~tyrespiration is presented from several research cruises in the HCS and adjacent oceanlc areas. The highest production levels were found near the coast correlating closely with known upwelling areas. Both gross primary production (GPP) and community respiration (CR) showed important spatial and temporal fluctuations. The highest water column inte- grated GPP was measured in the southern and central fishing area (19.9 g C m-2 d-l) and off the Anto- fagasta upwelling ecosystem (9.3 g C m-' d-'). The range of GPP agrees well with values reported for Peni (0.05 to ll.? g C m'2 d"). -
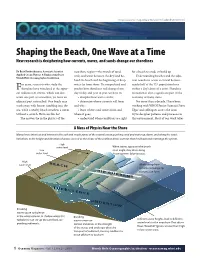
Shaping the Beach, One Wave at a Time New Research Is Deciphering How Currents, Waves, and Sands Change Our Shorelines
http://oceanusmag.whoi.edu/v43n1/raubenheimer.html Shaping the Beach, One Wave at a Time New research is deciphering how currents, waves, and sands change our shorelines By Britt Raubenheimer, Associate Scientist nearshore region—the stretch of sand, for a beach to erode or build up. Applied Ocean Physics & Engineering Dept. rock, and water between the dry land be- Understanding beaches and the adja- Woods Hole Oceanographic Institution hind the beach and the beginning of deep cent nearshore ocean is critical because or years, scientists who study the water far from shore. To comprehend and nearly half of the U.S. population lives Fshoreline have wondered at the appar- predict how shorelines will change from within a day’s drive of a coast. Shoreline ent fickleness of storms, which can dev- day to day and year to year, we have to: recreation is also a significant part of the astate one part of a coastline, yet leave an • decipher how waves evolve; economy of many states. adjacent part untouched. One beach may • determine where currents will form For more than a decade, I have been wash away, with houses tumbling into the and why; working with WHOI Senior Scientist Steve sea, while a nearby beach weathers a storm • learn where sand comes from and Elgar and colleagues across the coun- without a scratch. How can this be? where it goes; try to decipher patterns and processes in The answers lie in the physics of the • understand when conditions are right this environment. Most of our work takes A Mess of Physics Near the Shore Many forces intersect and interact in the surf and swash zones of the coastal ocean, pushing sand and water up, down, and along the coast.