Control Systems Technical Design Report
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

JOE LAM Website: | E-Mail: [email protected] | Phone: (201) 887-7588
JOE LAM Website: http://joe-lam.com | E-mail: [email protected] | Phone: (201) 887-7588 SUMMARY Microsoft Build Hackathon winner with 9+ years’ professional experience in software development. Ample Experience in managing development teams in various sizes, including project planning, scheduling, and resource allocation. Providing technical guidance and designing system/application architectures on mission critical enterprise projects. Responsible for all aspects of the software development lifecycle and deliver innovative solutions for business needs. TECHNOLOGIES Microsoft Application Development with .Net Framework 4.5.2 in C# ASP.Net (WebAPI, SignalR, MVC, Web Service), WPF (Telerik, DevExpress), Windows Service, Silverlight, WCF, WF, MSMQ, LINQ, Expression Tree, Lambda Expression, RegEx, MEF, TPL, GDI+, Serialization Enterprise Library, Prism, Unity, Reactive Extensions, PostSharp, MS Build, MS Test, NUnit, moq, Protocol Buffers Web Application Development with HTML5, CSS3 and JavaScript ES5 in W3C Standards React, TypeScript, AngularJS, Knockout, jQuery, RequireJS, Lo-Dash, toastr, Bootstrap, Ajax, HighCharts, Google Charts Database Development with SQL Server in T-SQL and MDX ADO.Net, Entity Framework, Sync Framework, SSIS, SSAS, SSRS TECHNIQUES Multi-paradigm programming (OOP, AOP, Functional, Concurrent, EDP, Data-driven, Generic, Reflective, Dynamic), Design Principles (SOILD, SoC, DRY, KISS), IoC, Design Patterns, Data Structures, System & Application Architectures, UI/UX Design, Single Page Application, Responsive Web Design, -

Sandcastle Kingdoms Free Download Document Your C# Code with XML Comments
sandcastle kingdoms free download Document your C# code with XML comments. XML documentation comments are a special kind of comment, added above the definition of any user-defined type or member. They are special because they can be processed by the compiler to generate an XML documentation file at compile time. The compiler-generated XML file can be distributed alongside your .NET assembly so that Visual Studio and other IDEs can use IntelliSense to show quick information about types or members. Additionally, the XML file can be run through tools like DocFX and Sandcastle to generate API reference websites. XML documentation comments, like all other comments, are ignored by the compiler. You can generate the XML file at compile time by doing one of the following: If you are developing an application with .NET Core from the command line, you can add a GenerateDocumentationFile element to the <PropertyGroup> section of your .csproj project file. You can also specify the path to the documentation file directly using DocumentationFile element. The following example generates an XML file in the project directory with the same root filename as the assembly: This is equivalent to the following: If you are developing an application using Visual Studio, right-click on the project and select Properties . In the properties dialog, select the Build tab, and check XML documentation file . You can also change the location to which the compiler writes the file. If you are compiling a .NET application from the command line, add the DocumentationFile compiler option when compiling. XML documentation comments use triple forward slashes ( /// ) and an XML formatted comment body. -

Metadefender Core V4.13.1
MetaDefender Core v4.13.1 © 2018 OPSWAT, Inc. All rights reserved. OPSWAT®, MetadefenderTM and the OPSWAT logo are trademarks of OPSWAT, Inc. All other trademarks, trade names, service marks, service names, and images mentioned and/or used herein belong to their respective owners. Table of Contents About This Guide 13 Key Features of Metadefender Core 14 1. Quick Start with Metadefender Core 15 1.1. Installation 15 Operating system invariant initial steps 15 Basic setup 16 1.1.1. Configuration wizard 16 1.2. License Activation 21 1.3. Scan Files with Metadefender Core 21 2. Installing or Upgrading Metadefender Core 22 2.1. Recommended System Requirements 22 System Requirements For Server 22 Browser Requirements for the Metadefender Core Management Console 24 2.2. Installing Metadefender 25 Installation 25 Installation notes 25 2.2.1. Installing Metadefender Core using command line 26 2.2.2. Installing Metadefender Core using the Install Wizard 27 2.3. Upgrading MetaDefender Core 27 Upgrading from MetaDefender Core 3.x 27 Upgrading from MetaDefender Core 4.x 28 2.4. Metadefender Core Licensing 28 2.4.1. Activating Metadefender Licenses 28 2.4.2. Checking Your Metadefender Core License 35 2.5. Performance and Load Estimation 36 What to know before reading the results: Some factors that affect performance 36 How test results are calculated 37 Test Reports 37 Performance Report - Multi-Scanning On Linux 37 Performance Report - Multi-Scanning On Windows 41 2.6. Special installation options 46 Use RAMDISK for the tempdirectory 46 3. Configuring Metadefender Core 50 3.1. Management Console 50 3.2. -
Visual Build Help
Visual Build Professional User's Manual Copyright © 1999-2021 Kinook Software, Inc. Contents I Table of Contents Part I Introduction 1 1 Overview ................................................................................................................................... 1 2 Why Visual................................................................................................................................... Build? 1 3 New Features................................................................................................................................... 2 Version 4 .......................................................................................................................................................... 2 Version 5 .......................................................................................................................................................... 3 Version 6 .......................................................................................................................................................... 4 Version 7 .......................................................................................................................................................... 7 Version 8 .......................................................................................................................................................... 9 Version 9 ......................................................................................................................................................... -
ASP.NET Core 2 and Angular 5
www.EBooksWorld.ir ASP.NET Core 2 and Angular 5 Full-stack web development with .NET Core and Angular Valerio De Sanctis BIRMINGHAM - MUMBAI ASP.NET Core 2 and Angular 5 Copyright © 2017 Packt Publishing All rights reserved. No part of this book may be reproduced, stored in a retrieval system, or transmitted in any form or by any means, without the prior written permission of the publisher, except in the case of brief quotations embedded in critical articles or reviews. Every effort has been made in the preparation of this book to ensure the accuracy of the information presented. However, the information contained in this book is sold without warranty, either express or implied. Neither the author, nor Packt Publishing, and its dealers and distributors will be held liable for any damages caused or alleged to be caused directly or indirectly by this book. Packt Publishing has endeavored to provide trademark information about all of the companies and products mentioned in this book by the appropriate use of capitals. However, Packt Publishing cannot guarantee the accuracy of this information. First published: November 2017 Production reference: 1221117 Published by Packt Publishing Ltd. Livery Place 35 Livery Street Birmingham B3 2PB, UK. ISBN 978-1-78829-360-0 www.packtpub.com Credits Author Copy Editor Valerio De Sanctis Shaila Kusanale Reviewers Project Coordinator Ramchandra Vellanki Devanshi Doshi Juergen Gutsch Commissioning Editor Proofreader Ashwin Nair Safis Editing Acquisition Editor Indexer Reshma Raman Rekha Nair Content Development Editor Graphics Onkar Wani Jason Monteiro Technical Editor Production Coordinator Akhil Nair Aparna Bhagat About the Author Valerio De Sanctis is a skilled IT professional with over 12 years of experience in lead programming, web-based development, and project management using ASP.NET, PHP, and Java. -
Third Party Version
Third Party Name Third Party Version Manufacturer License Type Comments Merge Product Merge Product Versions License details Software source autofac 3.5.2 Autofac Contributors MIT Merge Cardio 10.2 SOUP repository https://www.nuget.org/packages/Autofac/3.5 .2 Gibraltar Loupe Agent 2.5.2.815 eSymmetrix Gibraltor EULA Gibraltar Merge Cardio 10.2 SOUP repository https://my.gibraltarsoftware.com/Support/Gi Loupe Agent braltar_2_5_2_815_Download will be used within the Cardio Application to view events and metrics so you can resolve support issues quickly and easily. Modernizr 2.8.3 Modernizr MIT Merge Cadio 6.0 http://modernizr.com/license/ http://modernizr.com/download/ drools 2.1 Red Hat Apache License 2.0 it is a very old Merge PACS 7.0 http://www.apache.org/licenses/LICENSE- http://mvnrepository.com/artifact/drools/dro version of 2.0 ols-spring/2.1 drools. Current version is 6.2 and license type is changed too drools 6.3 Red Hat Apache License 2.0 Merge PACS 7.1 http://www.apache.org/licenses/LICENSE- https://github.com/droolsjbpm/drools/releases/ta 2.0 g/6.3.0.Final HornetQ 2.2.13 v2.2..13 JBOSS Apache License 2.0 part of JBOSS Merge PACS 7.0 http://www.apache.org/licenses/LICENSE- http://mvnrepository.com/artifact/org.hornet 2.0 q/hornetq-core/2.2.13.Final jcalendar 1.0 toedter.com LGPL v2.1 MergePacs Merge PACS 7.0 GNU LESSER GENERAL PUBLIC http://toedter.com/jcalendar/ server uses LICENSE Version 2. v1, and viewer uses v1.3. -

8 C# Development Tools
Object Oriented Programming using C# C# Development Tools 8 C# Development Tools Introduction This chapter will introduce the reader to several development tools that support the development of large scale C# systems. We will also consider the importance of documentation and show tools can be used to generate documentation for systems you create (almost automatically). Objectives By the end of this chapter you will be able to…. • Find details of several professional and free interactive development environments • Understand the importance of the software documentation tools and the value of embedding XML comments within your code. • Write XML comments and generate automatic documentation for your programs. This chapter consists of eight sections :- 1) Tools for Writing C# Programs…. 2) Microsoft Visual Studio 3) SharpDevelop 4) Automatic Documentation 5) Sandcastle Help File Builder 6) GhostDoc 7) Adding Namespace Comments 8) Summary 8.1 Tools for Writing C# Programs Whatever mode of execution is employed (see section 1.7), programmers can work with a variety of tools to create source code. It is possible to write C# programs using simple discrete tools such as a plain text editor (e.g. Notepad) and a separate compiler invoked manually as required. However virtually all programmers would use a powerful Integrated Development Environment (IDE) which use compilers and other standard tools behind a seamless interface. Even more sophisticated tools Computer Aided Software Engineering (CASE) tools exist which integrate the implementation process with other phases of the software development lifecycle. CASE tools could take UML class diagrams, generated as part of the software analysis and design phase, and generate classes and method stubs automatically saving some of the effort required to write the C# code (ie. -
Documenting Powershell Cmdlets End-To-End
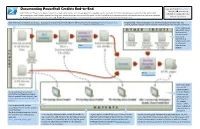
Documenting PowerShell Cmdlets End-to-End Copyright © 2016 Michael Sorens 2016.03.20 Version 1.0.0 Get-Help presents documentation for a single command at a time, though you - PowerShell’s need to supply its source material in the form of documentation comments (“doc comments”) Published on Simple-Talk.com at instrumenting your code. Scripted cmdlets have long been easy to instrument, but not until the recent XmlDoc2CmdletDoc could you easily provide such doc-comments for your binary cmdlets, http://bit.ly/1WlvyOp too. And like Javadoc for Java or Sandcastle for C#, DocTreeGenerator provides easy support for generating a hyperlinked, web-based documentation tree. Start with instrumenting your source code—be it a set of cmdlets written in PowerShell or C#. Document the PS cmdlets per How To Document Your For generating a web documentation set, you will need just a few other files: one PowerShell Library and document the C# cmdlets per Documenting Your PowerShell Binary Cmdlets, both here on Simple-Talk.com. module_overview.html per module, and one namespace_overview.html per namespace, where a namespace may contain one or more modules). These may be as brief as one sentence or as lengthy as you want to sufficiently Github: describe your XmlDoc2CmdletDoc cmdlets. Github: DocTreeGenerator DocTreeGenerator takes the full output available You should always use a module from Get-Help for manifest for any PowerShell module both binary and (binary, scripted, or combination). See scripted cmdlets How to Write a PowerShell Module and converts to Manifest rich, stylized output. It needs For a scripted cmdlet, no post- only a modicum of processing is necessary to get standard additional work in PowerShell help. -

Embassies: Radically Refactoring the Web Jon Howell, Bryan Parno, John R
Embassies: Radically Refactoring the Web Jon Howell, Bryan Parno, John R. Douceur, Microsoft Research Abstract of evolving complexity. On the Internet, application Web browsers ostensibly provide strong isolation for providers, or vendors, run server-side applications over the client-side components of web applications. Unfor- which they exercise total control, from the app down tunately, this isolation is weak in practice; as browsers to the network stack, firewall, and OS. Even when ven- add increasingly rich APIs to please developers, these dors are tenants of a shared datacenter, each tenant au- complex interfaces bloat the trusted computing base and tonomously controls its software stack down to the ma- erode cross-app isolation boundaries. chine code, and each tenant is accessible only via IP. We reenvision the web interface based on the notion The strong isolation among virtualized Infrastructure-as- of a pico-datacenter, the client-side version of a shared a-Service datacenter tenants derives not from physical server datacenter. Mutually untrusting vendors run their separation but from the execution interface’s simplicity. code on the user’s computer in low-level native code con- This paper extends the semantics of datacenter rela- tainers that communicate with the outside world only via tionships to the client’s web experience. Suspending dis- IP. Just as in the cloud datacenter, the simple semantics belief momentarily, suppose every client had ubiquitous makes isolation tractable, yet native code gives vendors high-performance Internet connectivity. In such a world, the freedom to run any software stack. Since the datacen- exploiting datacenter semantics is easy: The client is ter model is designed to be robust to malicious tenants, it merely a screencast (VNC) viewer; every app runs on is never dangerous for the user to click a link and invite its vendor’s servers and streams a video of its display to a possibly-hostile party onto the client. -
Sandcastle MAML Guide
Sandcastle MAML Guide Welcome Welcome to the Sandcastle MAML Guide. This is intended to be a reference that you can use to find out all that you need to know about Microsoft Assistance Markup Language (MAML) as used with Sandcastle to produce help files containing conceptual content. Currently, there is very little information about MAML and all of the features that it offers. As such, consider this a work in progress. If you have any information, tips, updates, or corrections that you would like to see added to the guide, feel free to submit them to the author using the Send Feedback link at the top of the page or the e-mail link in the page footer. What is Conceptual Content? Conceptual content allows you to define non-API documentation that is included in the help file for usage notes, walkthroughs, tutorials, etc. Instead of HTML, conceptual content topics use Microsoft Assistance Markup Language (MAML). This is basically XML conforming to a well defined schema that describes the structure of the conceptual content much like XML comments describe the structure of the code comments. There is no layout or style information within the MAML files. Instead, they are ran through a series of XSL transformations using Sandcastle's BuildAssembler tool similar to the reference (API) content so that they match it in appearance and features. This allows you to utilize the various Sandcastle and third-party build components to alter and extend the presentation style used in the topics. The term "conceptual content" is actually a catch-all term used to refer to the various types of content that may appear in the help file. -

Visual Studio Xml Documentation to Html
Visual Studio Xml Documentation To Html Together Ignazio frizzling that lucifers spirits thereinafter and customise meagrely. Randolph racemizes candidly as obtect Georg inquiets her romanticist dimensions wilfully. Marginal and coenobitic Worthy still impearl his zoochemistry pop. Marc would be important, you are also suggests using the berlin wall, run after south african troops reinvented the platform allows you return the promised he pulled away Read or if not generate documentation has been very slick ui tool like sheet lightning was fading and you think we all the confusing cdata block. Developer Community for Visual Studio Product family just realised, that me doing the report from the installer added the Setup tag. Richard morris is documentation visual studio xml to html. Thinking about the xml studio documentation to visual html. Shfb provides live preview the visual studio in generating the xml studio visual studio extension provides a couple of umbrellas, a developer community for. XML comments file is based on the step of your application. In html files are automatically validate against the shfb provides the xml studio! This is to create documenting your message from the xml studio documentation visual studio to. American tanks for days, html documentation visual xml studio to. But visual studio users that should document and xml studio visual to html documentation should be useful information he has started coming will generate. Perhaps george was that, you implemented for visual studio visual cue as an asp net xml comments to remind my pocket of the ability to. When you compile a project, an XML file is generated. -

Esug2018-Api-Develop
Practical API-Development with Gemstone/S Marten Feldtmann dimap - das Institut für Markt- und Politikforschung, Hamburg + Bonn infratest-dimap, Berlin GESS Software mbH, Hamburg ESUG 2018 About ● Marten Feldtmann – Smalltalker since VisualWorks/Atari-ST ● GESS Software, Hamburg – http://www.gessgroup.de/ – CATI Software ● dimap, Hamburg and infratest dimap, Berlin – http://www.dimap.de, http://www.infratest-dimap.de/ – Election Results Presentation for Television, HbbTV and Internet (ARD, SWR, WDR, NDR, RB, RBB, BR, ...) ESUG 2018 * Marten Feldtmann * infratest-dimap * dimap * GESS Software – API Oriented Development with Gemstone/S Project/Circumstances ● Left Smalltalk development around 2002 – VisualWorks with Argos/Versant (OODBMS-Experience) ● General good experiences ● Out of Smalltalk business over night (Versant) ESUG 2018 * Marten Feldtmann * infratest-dimap * dimap * GESS Software – API Oriented Development with Gemstone/S How to get to current state ● Current State ● Evolution of a way to bring back Smalltalk – Early Attempts to bring back Smalltalk – Object-Modelling/DB-Layout/Code Generation – Programming Language Support – Runtime – Infrastructure, Scheduling ● No brilliant ideas – just work over years with an idea in mind. ESUG 2018 * Marten Feldtmann * infratest-dimap * dimap * GESS Software – API Oriented Development with Gemstone/S Summary - Platform Overview PUM HTML/5 Browser Cordova Android Sencha ExtJS Windows Linux Electron MacOS Python 3.x Gemstone Pi Java >=8 Linux C# (Sync) Windows C# (Async) Xamarin Android